Добавлен: 09.11.2023
Просмотров: 30
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Курсовая работа
Теория механизмов и машин
Екатеринбург

Оглавление
Введение 4
1. Структурный анализ механизма 5
1.1 Схема механизма 5
1.2 Характер движения механизма 5
1.3 Характер кинематических пар (КП) 5
1.4 Число степеней подвижности механизма 6
1.5 Разложение механизма на структурные группы Ассура. Определение класса групп и класса механизма 6
1.6 Избыточные связи 7
2. Кинематическое исследование механизма 8
3. Динамическое иследование механизма 9
3.1 Построение динамической модели машины 9
3.2 Построение графика приведенного момента сил сопротивления 10
3.3 Построение графика приведенного момента инерции 10
3.4 Построение графика работ сил сопротивления 11
3.5 Определение угловой скорости начального звена 11
4. Силовой расчет механизма 13
4.1 Выбор положения 13
4.2 Построение плана ускорений 13
4.3 Определение сил и моментов сил инерции 15
4.4 Расчет ведомой группы 4-5 15
4.5 Расчет группы 2-3 16
4.6 Расчет начального звена 17
5. Синтез кулачкового механизма 18
5.1 Исходные данные 18
5.2 Синтез кулачкового механизма 18
5.3 Построение профиля кулачка 19
5.4 Построение графика углов давления 19
6. Синтез планетарного редуктора 20
Библиографический список 22
Введение
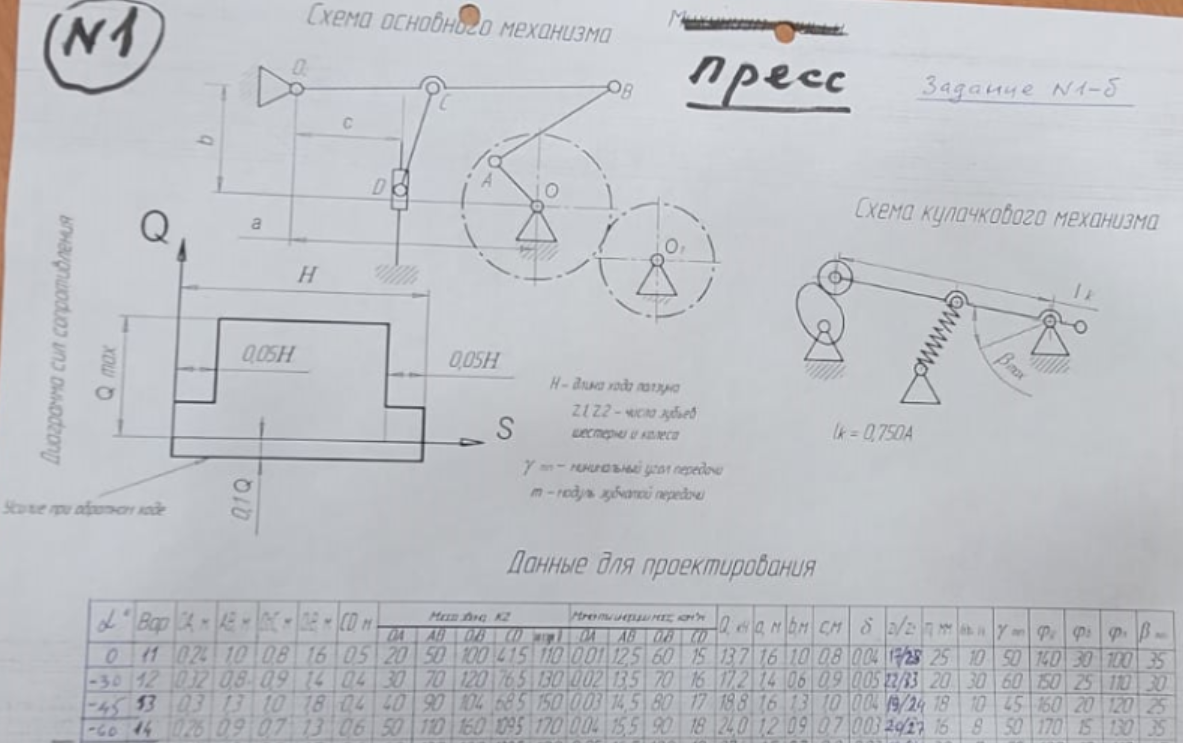
Кривошипные прессы применяются почти для всех операций холодной и горячей штамповки изделий из листового и сортового материалов и в заготовительных цехах для разделки прутков на мерные заготовки или разрезки листов.
Действие кривошипного пресса основано на преобразовании вращательного движения в возвратно-поступательное движения ползуна пресса с закрепленным на нем инструменте.
Выталкивание готовых изделий из формы осуществляется толкателем кулачкового механизма.
Кривошип получает вращение от электродвигателя через редуктор, состоящий из планетарной и непланетарной ступеней.
Исходные данные варианта 13
1. Структурный анализ механизма
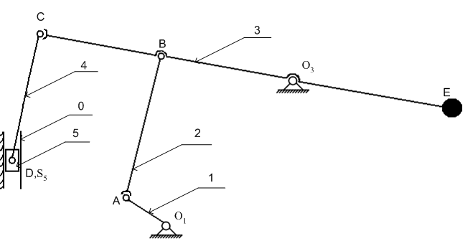
1.1 Схема механизма
1.2 Характер движения механизма
| № звена | Название звена | Вид движения |
| 1 | Кривошип | Вращательное движение |
| 2 | Шатун | плоско-параллельное |
| 3 | Коромысло | возвратно - вращательное |
| 4 | Шатун | плоско - параллельное |
| 5 | Ползун | Возвратно - поступательное |
| 0 | Стойка | Неподвижна |
1.3 Характер кинематических пар (КП)
Все КП, соединяющие звенья этого механизма 5 - го класса
| обознач. КП | O1 | A | В | О3 | С | D | E |
| Какие звенья соединяет | 0-1 | 1-2 | 2-3 | 0-3 | 3-4 | 4-5 | 0-5 |
| Тип КП | Вращ. | Вращ. | Вращ. | Вращ. | Вращ. | Вращ. | Поступ. |
1.4 Число степеней подвижности механизма
Степень подвижности для плоского механизма определяется формулой:
 ;
;  ,
,где n - число подвижных звеньев. Для данного механизма n = 5
PН - число кинематических пар низшего класса. PН = 7
PВ - число кинематических пар высшего класса. PВ = 0
1.5 Разложение механизма на структурные группы Ассура. Определение класса групп и класса механизма
| Схема группы | Описание |
 | Группа 4-5 W=3∙2-2∙3=0 Двухповодковая группа группа Асура второго класса |
 | Группа 2-3 W=3∙2-2∙3=0 Двухповодковая группа группа Асура второго класса |
 | Начальное звено: W=3∙1-2∙1=1 Механизм первого класса |
Класс механизма определяется наивысшим классом входящей в него структурной группы.
Значит, этот механизм относится ко второму классу.
1.6 Избыточные связи

| Обозначение КП | Характер КП | Класс КП |
| O1 (0-1) | Вращательная | V |
| A (1-2) | Сферическая | III |
| B (2-3) | Цилиндрическая | IV |
| O3 (0-3) | Вращательная | V |
| C (3-4) | Цилиндрическая | IV |
| D (4-5) | Сферическая | III |
| E (0-5) | Поступательная | V |
Окончательно

2. Кинематическое исследование механизма
Масштаб длин звеньев механизма
Построение плана скоростей
1. Находим угловую скорость кривошипа

2. Находим скорость т. А

3. Выбираем масштабный коэффициент плана скоростей
4. Запишем векторные уравнения для построения плана скоростей:



Построив в масштабе план скоростей, находим линейные скорости и сводим результат в таблицу 1.
5. Вычисляем угловые скорости звеньев 2,3,4 для каждого положения и вносим в таблицу 1 по формулам:



табл.1
| | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
 | 0 | 0.2 | 0.27 | 0.3 | 0.25 | 0.13 | 0 | 0.1 | 0.21 | 0.31 | 0.34 | 0.22 |
| VD | 0 | 0.38 | 0.57 | 0.6 | 0.45 | 0.22 | 0 | 0.2 | 0.4 | 0.61 | 0.62 | 0.43 |
 | 0 | 0.2 | 0.28 | 0.3 | 0.25 | 0.13 | 0 | 0.11 | 0.22 | 0.3 | 0.33 | 0.21 |
| Vc | 0 | 0.37 | 0.57 | 0.6 | 0.5 | 0.25 | 0 | 0.21 | 0.43 | 0.62 | 0.67 | 0.44 |
| Va | 0.30 | 0.30 | 0.30 | 0.30 | 0.30 | 0.30 | 0 | 0.30 | 0.30 | 0.30 | 0.30 | 0.30 |
| VBA | 0 | 0.2 | 0.1 | 0.04 | 0.11 | 0.24 | 0 | 0.39 | 0.24 | 0.04 | 0.22 | 0.44 |
| VDC | 0 | 0.1 | 0.7 | 0.05 | 0.13 | 0.07 | 0 | 0.07 | 0.1 | 0.05 | 0.07 | 0.11 |
| ω2 | 0.003 | 0.002 | 0.027 | 0.003 | 0.0025 | 0.0013 | 0.003 | 0.001 | 0.0021 | 0.003 | 0.034 | 0.0022 |
| ω3 | 0.004 | 0.0049 | 0.00746 | 0.008 | 0.0066 | 0.0033 | 0.004 | 0.0028 | 0.0057 | 0.00826 | 0.0089 | 0.0058 |
| ω4 | 0.003 | 0.0038 | 0.0057 | 0.0061 | 0.0045 | 0.0022 | 0.003 | 0.002 | 0.004 | 0.0061 | 0.0062 | 0.0043 |
3. Динамическое иследование механизма
Цель: определение истинного закона движения начального звена и расчет маховика.
3.1 Построение динамической модели машины
Для упрощения решения задачи реальную схему машины с одной степенью свободы с недеформируемыми звеньями и начальным звеном, совершающим вращательное движение (кривошип) является одно-массовая система, обладающая некоторой условной массой, кинетическая энергия которой в любом положении звена приведенная равна кинетической энергии всего механизма:
Tn=Jn
 1/2=
1/2= Ti,
Ti,и нагруженной фиктивным моментом, мощность которого равна сумме мощностей, развиваемых всеми силами, действующими в механизме:
Nn=Mn
1= Ni.
Здесь обозначено:
Jn - момент инерции приведенной массы относительно оси вращения;
Mn - приведенный момент всех внешних сил
Mn= Mnс - Mnд;
Mnд - приведенный момент движущих сил (Нм);
Mnс - приведенный момент сил сопротивления (Нм).
1) Массы звеньев: mi=liqi: m2=15 кг, m4=13,5 кг, m5=40 кг
2) Моменты инерции звеньев: IS1=0.004 кгм2.
3) Сила сопротивления: Р5=2700Н
4) Приведение сил:
Mnc*
1=G3VS3cos ( ) +P5VS5cos (
) +P5VS5cos ( )
)Mnс=-P5
 / 1
/ 13.2 Построение графика приведенного момента сил сопротивления
 .
.Задаем l=180 мм и Н=38 мм, тогда

Приведение момент инерций:
 , JS1=0,8;
, JS1=0,8;  / 21=0.15; m5/ 21=0.45; то
/ 21=0.15; m5/ 21=0.45; тоJn=0.004+ 0.17V2S3+0.45V2S5
3.3 Построение графика приведенного момента инерции
| | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| Jn | 2.06 | 3.06 | 3.9 | 7.92 | 4.8 | 1.42 | 1.21 | 1.41 | 3.8 | 8.14 | 9.01 | 4.16 |
| yJ | 176 | 275 | 360 | 762 | 450 | 112 | 91 | 111 | 350 | 784 | 871 | 386 |
3.4 Построение графика работ сил сопротивления
Строится графическим интегрированием графика Мnc, для чего криволинейную фигуру заменяем равновеликими прямоугольниками.


Построение графика работ движущих сил: Ад=Аi.
Построение графика избыточных работ:
 .
.Построение диаграммы Виттенбауэра.
Расчет маховика.
Маховик служит для уменьшения неравномерности движения.
 .
.Коэффициент неравномерности движения
 ,
, 




Под этими углами к диаграмме Виттенбауэра проводим касательные
 - сверху и
- сверху и  - снизу. nm=55 мм
- снизу. nm=55 ммОпределяем момент инерции маховика:



3.5 Определение угловой скорости начального звена
Начальное значение кинетической энергии:

Изменение кинетической энергии во всех положениях
 ; определяем значение угловой скорости
; определяем значение угловой скорости 
Задаемся
 , тогда
, тогда 
| | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| ∆T | 0 | 10.64 | 31.92 | 117.04 | 202.16 | 266 | 287.28 | 266 | 250.04 | 202.16 | 148.96 | 101.08 |
| Jn | 2.06 | 3.06 | 3.9 | 7.92 | 4.8 | 1.42 | 1.21 | 1.41 | 3.8 | 8.14 | 9.01 | 4.16 |
| ωi | 1.9 | 1.55 | 1.34 | 0.86 | 1.22 | 2.44 | 2.7 | 2.46 | 1.38 | 0.9 | 0.86 | 1.29 |
| yω | 107 | 106 | 103 | 98 | 90 | 90 | 90 | 92 | 93 | 95 | 96 | 99 |
Проверка:

 %=
%= %=2,972%
%=2,972%
4. Силовой расчет механизма
Цель силового расчета: определение реакций в кинематических парах и уравновешивающего момента.
4.1 Выбор положения
Выбираем 10-е положение рабочего хода, когда действует максимальная нагрузка. Прикладываем действующие внешние силы, переносим с 1-ого листа план скоростей, строим план ускорений.
4.2 Построение плана ускорений
План ускорений строим для одного положения механизма на рабочем ходе.
Определяем ускорение т. А кривошипа.

Нормальное ускорение направлено направлено к мгновенному центру вращения, т.е. то есть вдоль звена О1А и по направлено к точке О1.
Выбираем масштабный коэффициент ускорения
Ускорение т. В
 , // ВА_|_ВА // ВО3_|_ВО3
, // ВА_|_ВА // ВО3_|_ВО3Так как точка О3 неподвижна, то её ускорение
 /
/Относительные нормальные ускорения:


Отрезки, изображающие нормальные ускорения

Из точки а плана ускорений отрезок
 параллельно АВ в направлении от точки В к точке А. Через полученную точку n1 проводим прямую перпендикулярно АВ. Затем откладываем из точки
параллельно АВ в направлении от точки В к точке А. Через полученную точку n1 проводим прямую перпендикулярно АВ. Затем откладываем из точки  отрезок
отрезок  параллельно ВО3 по направлению от В к О3. Через полученную точку n2 проводим линию АВ до пересечения с прямой, проведенной через точку n1. Точку пересечения b, соединяем с полюсом . Отрезок
параллельно ВО3 по направлению от В к О3. Через полученную точку n2 проводим линию АВ до пересечения с прямой, проведенной через точку n1. Точку пересечения b, соединяем с полюсом . Отрезок  изображает в масштабе ускорение точки b.
изображает в масштабе ускорение точки b.Для построения ускорения т. С пользуемся свойством подобия и пропорциональности одноименных отрезков на плане механизма и плане ускорений.

Ускорение точки D ползуна определяем по векторному ускорению
 , // у-у // DC_|_DC
, // у-у // DC_|_DCАбсолютное ускорение т. D имеет направление параллельно направляющей.
Относительное нормальное ускорение

Отрезок, изображающий нормальное ускорение
Из точки с плана ускорений проводим отрезок cn4 перпендикулярно DC, а из точки n проводим линию параллельно DC. Из полюса проводим линию параллельно оси Y. Точка пересечения d определяет отрезок
 , соответствующий ускорению
, соответствующий ускорению  .
.По плану ускорений определяем ускорения точек и звеньев.

Угловое ускорение:

Направление
 определяется вектором касательных ускорений.
определяется вектором касательных ускорений.4.3 Определение сил и моментов сил инерции
Силы инерции прикладываем в соответствующих точках и направляем противоположную сторону ускорений центров масс, моменты сил инерции - противоположно угловым ускорениям центров масс, моменты сил инерции - противоположно угловым ускорениям звеньев.
4.4 Расчет ведомой группы 4-5
Изображаем группу и прикладываем внешние силы, силы и моменты сил инерции и реакции со стороны отброшенных звеньев:
R05, R34, R45, R54,
 .
.Находим реакции по уравнениям, так как группа согласно принципу Даламбера находится в равновесии.
Находим тангенциальную составляющую силу

Находим реакции опор:

Данное уравнение решается графически.
Задаемся масштабным коэффициентом сил:

Определяем масштабные коэффициенты значения сил и строим план сил.

Из плана сил находим

Находим внутреннюю реакцию
4.5 Расчет группы 2-3
Изображаем группу и прикладываем внешние силы, силы и моменты сил инерции и реакции со стороны отброшенных звеньев: R03, R12, Fи2, MИ2, G2, G3, R34. Находим внутреннюю составляющие сил:

Рассмотрим равновесие группы в целом

Данное уравнение решается графически.
Задаемся масштабными коэффициентами сил:
Определяем масштабные значения сил и строим план сил:
 . Из плана сил находим:
. Из плана сил находим:
Находим внутреннюю реакцию:

Строим план сил:

4.6 Расчет начального звена
Изображаем звено и прикладываем в точку А силу R21. Для уравновешивания звена к нему необходимо приложить уравновешивающую силу Fy.
Находим реакцию в опоре:

Данное уравнение решается графически:
Задаемся масштабным коэффициентом сил
Определяем масштабные значения сил и строим план сил.
Из плана сил находим:

Находим уравновешивающий момент:
5. Синтез кулачкового механизма
Цель синтеза: построение профиля кулачка по заданному закону движения толкателя.
5.1 Исходные данные
-
тип кулачкового механизма: с коромысловым толкателем; -
направление вращение кулачка: по часовой стрелки; -
максимальное перемещение толкателя: ;
; -
Законы движения толкателя:
фаза подъема: линейный;
фаза опускания: синусоидный.
Фазовые углы:
фаза подъема: 120°;
фаза верхнего выстоя: 90°;
фаза опускания: 120°;
фаза нижнего выстоя: 30°;
-
допустимый угол давления: 25°; -
длина коромыслового толкателя: 100 мм.
5.2 Синтез кулачкового механизма
Расстояние между осями кулачка и коромысла: 92.5 мм.
Начальный радиус центрального профиля кулачка: 23.67 мм.
Радиус ролика5.2 мм.
Таблица 2 - Закон движения толкателя
 | 0 | 15 | 30 | 45 | 60 | 75 | 90 | 105 | 120 | 210 |
| ST | 0 | 1.98 | 7.62 | 16.05 | 26 | 35.95 | 44.38 | 50.02 | 52 | 52 |
| | 225 | 240 | 255 | 270 | 285 | 300 | 315 | 330 | | |
| ST | 50.38 | 45.5 | 37.38 | 26 | 14.63 | 6.5 | 1.63 | 0 | | |
5.3 Построение профиля кулачка
Метод инверсий - мысленно всему кулачковому механизму сообщается угловая скорость равная по величине, но противоположная по направлению угловой скорости кулачка. Кулачок представляется остановленным, а толкатель будет участвовать в двух движениях: переносном и относительном.
5.4 Построение графика углов давления
Измеряем углы давления между нормалью к профилю и осью толкателя и строим график углов давления в масштабах:
 | 0 | 15 | 30 | 45 | 60 | 75 | 90 | 105 | 120 | 210 | |
 | 37 | 38 | 56 | 57 | 55 | 58 | 49 | 48 | 37 | 36 | |
| | 225 | 240 | 255 | 270 | 285 | 300 | 315 | 330 | | | |
 | 30 | 31 | 21 | 29 | 42 | 44 | 18 | 17 | | | |
6. Синтез планетарного редуктора
Находим общее передаточное число привода

Передаточное отношение для данного редуктора определяется выражением:
Задаваясь значением Z3 найдем Z5. Для Z3=21 Z5 = Z3 (Uпл-1) = 126
Принимаем Z5 = 126
Из условия соостности
Проверка
1). Условие сборки:
 C,P - любое целое число
C,P - любое целое числоK - число сателлитов примем 3
Условие выполняется.
2). Условие соседства:
64.678>54 Условие выполняется
Находим радиусы колес:
Схему редуктора строем в масштабе:
Кинематическое исследование планетарного механизма:

Построив план скоростей находим углы:



Библиографический список
-
Артоболевский И.И. Теория механизмов и машин. М. Наука, 1975г. -
Кореняко А.С. Курсовое проектирование по теории механизмов и машин. Киев. Вища школа, 1970г. -
Курсовое проектирование по теории механизмов и машин / под ред. А.С. Кореняко. Киев: Вища школа, 1970. 332 с. -
Попов С.А. Курсовое проектирование по теории механизмов и механики машин. М. Высшая школа, 1986г. -
Попов С.А. Курсовое проектированис по теории механизмов и машин. С.А. Попов Т.А. Тимофеев. М.: Высш. шк., 1998. 351 с. -
Теория механизмов и машин: методические указания по выполнению курсового проектакта /под ред. В.И. Соколовского. Свердловск: УПИ, 1978 . Ч.1. 16 с. -
Теория механизмов и машин: методические указания по выполнению курсового проеекта / под ред. В. И. Соколовского - Сверловск.: УПИ, 1978. Ч. 2. 16 с. -
Теория Механизмов и механика машин /под peд. К.В. Фролова. М.: Высш. шк., 1998. 496с. -
Фролов К.В. Теория механизмов и машин. М. Высшая школа, 1987г.