ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2021
Просмотров: 186
Скачиваний: 1
Будівельна механіка в прикладах і задачах
Спеціальність – 0921 – “Будівництво”
Тема: Варіаційне обчислення
Лекція №5. Варіаційна задача будівельної механіки. Дослідження екстремуму функціонала (виразу потенційної енергії балки) за методом Рітца .
Мета і задачі:
Метою теми є вміння визначати напружено-деформований стан в будівельних конструкціях шляхом дослідження виразу потенційної енергії системи.
Для досягнення мети необхідно вирішення наступних задач:
1. Для конкретної розрахункової схеми підібрати координатну функцію.
2. Визначити першу і другу похідні від координатної функції по довжині балки та підставити у вираз потенційної енергії балки (в функціонал).
3. Інтегрування виразу дає функціональну залежність, невідомими в якій є ступені вільності системи.
4. Диференціювання за ступенями вільності системи дає систему лінійних алгебричних рівнянь, корені якої визначають шукані ступені вільності в координатних функціях. Таким чином, прогин конструкції буде знайдено.
5 Варіаційна задача будівельної механіки. Дослідження екстремуму функціонала (виразу потенційної енергії балки) за методом Рітца
5.1 Короткі відомості з варіаційного числення. Поняття
функціонала та необхідні умови екстремуму
Розглянемо деякий визначений інтеграл
 (5.1)
(5.1)
з
граничними умовами
![]()
![]() .
(5.2)
.
(5.2)
Вираз типу (5.1) у варіаційному численні називають функціоналом (функція від функції).
Пошук умов, при яких функціонали набувають стаціонарного значення і становлять зміст задачі варіаційного числення. Вважається, що функція в точці має стаціонарне значення, якщо швидкість її зміни в цій точці дорівнює нулю (тобто дорівнюють нулю перші часткові похідні функції за всіма незалежними змінними).
Нехай
маємо деяку функцію y(x),
яка надає інтегралу (5.1)
стаціонарного
значення. Для того, щоб показати, що
справді маємо стаціонарне
значення, розглянемо деяку функцію
![]() ,відмінну
від
y(x)
але
водночас нескінченно близьку до неї
(рис. 5.1).
,відмінну
від
y(x)
але
водночас нескінченно близьку до неї
(рис. 5.1).
![]() ,
(5.3)
,
(5.3)
де
![]() - довільна як завгодно мала величина,
- довільна як завгодно мала величина,
![]() деяка функція, що задовольняє умови
неперервності й диференційованості.
Різниця
деяка функція, що задовольняє умови
неперервності й диференційованості.
Різниця
![]() називається
варіацією функції
називається
варіацією функції
![]() .
Лагранж
ввів для
.
Лагранж
ввів для

Рисунок 5.1 – До поняття варіації функції
неї
позначення
![]() .
.
Дуже
важливо, що величина dy
має, так званий, віртуальний (можливий)
характер,
тобто, не пов’язана з жодними умовами
і може бути довільною. Якщо
функцію
![]() тлумачити
як переміщення, то dy
називатиметься
можливим
переміщенням.
тлумачити
як переміщення, то dy
називатиметься
можливим
переміщенням.
Більшість методів розв'язування варіаційних задач ґрунтується на використанні необхідних умов екстремуму, якими зазвичай бувають диференціальні рівняння (рівняння Ейлера) і граничні умови. Отже, варіаційна задача виявляється еквівалентною крайовій задачі для диференціального рівняння.
Диференціальне рівняння
![]() (5.4)
(5.4)
виражає необхідну й достатню умову стаціонарності інтеграла при заданих граничних умовах. Тобто коли підінтегральна функція задовольняє рівняння (5.4), тоді функціонал (5.1) має стаціонарне значення.
Рівняння (5.4) отримали незалежно Л. Ейлер та Ж. Лагранж, тому воно називається рівнянням Ейлера - Лагранжа і відіграє фундаментальну роль у варіаційному численні.
Як приклад, можна навести варіаційну задачу Лагранжа про пошук мінімуму потенціальної енергії пружного стержня, еквівалентну диференціальному рівнянню рівноваги, записаному в переміщеннях з відповідними граничними умовами. Рівняння рівноваги вигнутого стержня (балки) має вигляд :
![]() .
(5.6)
.
(5.6)
Знак "+" відповідає випадку, коли вісь у спрямована вгору. Тоді знаки моменту М та другої похідної у" збігаються.
Функціоналом
для рівняння (5.6) при розв'язуванні цієї
задачі буде вираз повної потенціальної
енергії пружної балки, розв'язок
рівняння
(5.6) - знайдена пружна лінія балки
![]() -
забезпечить мінімум потенціальної
енергії балки. Іншими словами, рівняння
рівноваги це
рівняння Ейлера - Лагранжа для відповідного
функціонала. До
них потрібно ще приєднати граничні
умови, які можна отримати з виразу
енергії.
-
забезпечить мінімум потенціальної
енергії балки. Іншими словами, рівняння
рівноваги це
рівняння Ейлера - Лагранжа для відповідного
функціонала. До
них потрібно ще приєднати граничні
умови, які можна отримати з виразу
енергії.
Отже, повна потенціальна енергія системи дає повну інформацію про систему, оскільки дозволяє отримати не тільки рівняння рівноваги, а й конкретні граничні умови задачі.
5.2 Суть варіаційних методів розв'язування диференціальних рівнянь. Форма апроксимуючої функції
Суть варіаційних методів розв'язування диференціальних рівнянь полягає в тому, що функція, яка задовольняє диференціальне рівняння при заданих граничних умовах, замінюється наближеним аналітичним виразом. Цей вираз добирається так, щоб він найкраще апроксимував. дану функцію, тобто, щоб відхилення від істинного значення функції було найменшим.
При розв'язуванні цієї задачі зазвичай виникають два питання:
а) про вибір форми апроксимуючої функції;
б) про спосіб наближення цієї функції.
Кожне з цих питань потрібно досліджувати окремо, оскільки від форми апроксимуючої функції та від способу наближення залежить швидкість процесу збіжності результатів.
Практичне застосування варіаційних методів показує, що найзручнішою формою вираження апроксимуючої функції для будь-якого числа
незалежних змінних є подання функції у вигляді ряду:
![]()
![]() (5.7)
(5.7)
де
аі-
- невизначені сталі параметри, які
варіюються згідно з прийнятим
способом наближення;
![]() -
"підходящі" функції, які в сукупності
найкраще
зображують досліджувану функцію.
-
"підходящі" функції, які в сукупності
найкраще
зображують досліджувану функцію.
Розглянемо
перше питання. Припустимо для визначеності,
що йдеться
про функцію від однієї незалежної
змінної в проміжку
![]() ,
для якої відоме диференціальне рівняння
,
для якої відоме диференціальне рівняння
![]() ,
(5.8)
,
(5.8)
та
граничні умови
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
або інакше
,
або інакше
![]()
![]()

Рисунок 5.2 – Точний і наближенений розв’язок диференційного рівняння (5.8)
Нехай
![]() - точний розв’язок цього рівняння (рис.
5.2, суцільна лінія АВ), а
- точний розв’язок цього рівняння (рис.
5.2, суцільна лінія АВ), а
![]() -
довільний з наближених розв’язків
(пунктир на рис. 5.2). Яку з ліній слід
узяти за наближений розв’язок?
-
довільний з наближених розв’язків
(пунктир на рис. 5.2). Яку з ліній слід
узяти за наближений розв’язок?
1-й
спосіб.
Вибираємо функції
![]() так, щоб кожна з них окремо задовольняла
частину граничних умов. Диференційне
рівняння при цьому не задовольняється.
Параметри аі
визначаємо
з умови, коли
весь ряд в цілому найкраще апроксимує
функцію як всередині, так і на
кінцях проміжку.
так, щоб кожна з них окремо задовольняла
частину граничних умов. Диференційне
рівняння при цьому не задовольняється.
Параметри аі
визначаємо
з умови, коли
весь ряд в цілому найкраще апроксимує
функцію як всередині, так і на
кінцях проміжку.
2-й
спосіб.
Вибираємо функції
![]() так,
щоб кожна з них окремо задовольняла
всі граничні умови. Диференціальне
рівняння при цьому не
задовольняється. Параметри
так,
щоб кожна з них окремо задовольняла
всі граничні умови. Диференціальне
рівняння при цьому не
задовольняється. Параметри
![]() знаходимо з умови, коли весь ряд в цілому
найкраще апроксимує функцію всередині
проміжку.
знаходимо з умови, коли весь ряд в цілому
найкраще апроксимує функцію всередині
проміжку.
3-й
спосіб.
Вибираємо функції
![]() так,
щоб кожна з них окремо задовольняла
диференціальне рівняння, тобто, була
його частинним інтегралом
. Граничні умови при цьому не задовольняються.
Параметри
так,
щоб кожна з них окремо задовольняла
диференціальне рівняння, тобто, була
його частинним інтегралом
. Граничні умови при цьому не задовольняються.
Параметри
![]() знаходимо з умови, коли весь ряд в цілому
найкраще апроксимує функцію на
кінцях
проміжку.
знаходимо з умови, коли весь ряд в цілому
найкраще апроксимує функцію на
кінцях
проміжку.
З вказаних способів побудови ряду перший найпростіший, оскільки він накладає на функцію найменше число обмежень. Проте умова для знаходження параметрів при цьому виходить менш простою.
Наведені міркування для випадку однієї змінної поширюються на випадок двох незалежних змінних. Відмінність лише в тому, що тут
проміжок замінюється зоною площини, граничні точки - замкненим контуром цієї зони, а інтегральна лінія - інтегральною поверхнею.
Завжди весь ряд в цілому повинен якомога повніше відповідати очікуваному характеру зміни функції. Зауважимо, що при розв'язуванні практичних задач потрібні певні навички. Добре мати під руками довідкову таблицю, так званих, "підходящих" координатних функцій.
Так, наприклад, для вигину шарнірно обпертої балки координатну функцію можна записати у вигляді:
![]() ,
,
![]() .
(5.10)
.
(5.10)
Для більшості практичних випадків рівняння Ейлера - Лагранжа не можливо розв’язати точно, тому доводиться використовувати чисельні методи. У таких випадках докладають зусиль, щоб уникнути розв’язування диференціальних рівнянь, а спробувати побудувати мінімізуючу послідовність.
5.3 Метод Рітца
Метод
Рітца - один з чисельних
методів розв’язування диференціального
рівняння Ейлера. За
його допомогою варіаційна задача
зводиться до задачі пошуку екстремуму
функції. Основна ідея полягає ось у
чому. Нехай
![]() - повна система функцій в зоні визначення
функціонала
- повна система функцій в зоні визначення
функціонала
![]() ,
тобто кожна функція “у” з цієї зони
може бути наближена з будь-яким
ступенем точності лінійною комбінацією
деяких функцій
,
тобто кожна функція “у” з цієї зони
може бути наближена з будь-яким
ступенем точності лінійною комбінацією
деяких функцій
![]() ,
які називають координатними:
,
які називають координатними:
 ,
(5.11)
,
(5.11)
( п залежить від потрібної точності).
Якщо
цю лінійну комбінацію підставити у
функціонал
![]() ,
то він буде функцією
лише параметрів
,
то він буде функцією
лише параметрів
![]() :
:
 (5.12)
(5.12)
Необхідною
умовою того, що ця функція набуває
екстремального значення відносно
параметрів
![]() ,
є виконання систем співвід- ношень
,
є виконання систем співвід- ношень
![]() ;
;
![]() ;
;
![]() .
(5.13)
.
(5.13)
З
цієї системи нелінійних рівнянь
визначаються параметри
![]() ,
їх ще називають ступенями вільності.
Як правило, за фізичним змістом вони
є вузловими лінійними та кутовими
переміщеннями.
,
їх ще називають ступенями вільності.
Як правило, за фізичним змістом вони
є вузловими лінійними та кутовими
переміщеннями.
Ступінь вільності системи - це число незалежних геометричних параметрів, які повністю визначають можливі переміщення всіх її точок. Реальна пружна система завжди має нескінченне число ступенів вільності. Щоб чисельно розв’язати реальну задачу, деформований стан слід охарактеризувати переміщеннями скінченого числа точок, тобто число ступенів вільності вважається скінченим.
Координатні
функції
![]() добираються
так, щоб функція
добираються
так, щоб функція

задовольняла граничні умови задачі. Так, координатні функції описують розподіл переміщень по зоні прогнутого стержня, коли одне з переміщень дорівнює одиниці, а інші дорівнюють нулю. Вирази для координатних функцій, застосовних в основних випадках розрахунків, вміщені в табл. 5.1.
Приклад 1. Знайти екстремум функціонала
![]() ,
,
![]()
Розв’язання. Припустимо, що використовуються координатні функції
![]() ,
,
![]() ,...,
,...,
![]()
Нехай
![]() ,
тобто,
,
тобто,
![]() ,
,
![]() .
Тоді
.
Тоді
![]()
![]()
З умови
![]() і
і
![]() маємо:
маємо:


Таблиця 5.1 – Координатні функції
|
Граничні умови |
Координатні функції |
|
1 |
(
(
|
|
2 |
(симетричне навантаження)
(довільне навантаження) |
|
3 |
|
|
4 |
|




Продовження таблиці 5.1
|
5 |
|
|
|
|
|
7 |
(довільне навантаження)
(симетричне навантаження) |

 6
6

Звідси:
![]() ;
;
![]() ;
;
![]() .
.
Отже,
точний розв’язок
![]() .
.
Таблиця 5.2 – Результати порівняння точного та наближеного розв’язків
-
і

Точний розв´язок

1
-0,0285
-0,0287
2
-0,0506
-0,0506
Приклад ІІ. Крайова задача прогину балки.
Знайти лінію прогину в балці, зображеній на рис. 1.5.3.
Граничні
умови:
![]()
![]()
![]()
![]()
Розв´язати задачу у варіаційній постановці – означає знайти таку систему переміщень, яка мінімізує функціонал повної потенціальної енергії системи.
 Розв’язання.
Розв’язання.
Рисунок 5.3 – Розрахункова схема навантаження балки
Цей функціонал для даної задачі
![]() (5.14)
(5.14)
Перший доданок в (5.14) є потенційною енергією пружних деформацій, що дорівнює роботі внутрішніх сил, які діють на балку:
![]() (5.15)
(5.15)
У даному випадку другим і третім доданками в (5.15) можна знехтувати, оскільки за модулем вони досить малі. Другий доданок у (5.14) є потенціалом зовнішніх сил. Щоб розв´язати задачу, можна скористатися двома способами: 1) – мінімізувати функціонал; 2) – розв´язати диференціальне рівняння Ейлера - Лагранжа.
Наведемо приклад розв´язання першим способом. Доберемо координатну функцію у вигляді:
![]() ,
,
![]()
Нехай
n=1,
тоді
![]() і переміщення
і переміщення
![]() .
.
Координатна функція задовольняє такі граничні умови:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
При
x=0
(в середині балки)
![]() ,
що повністю відповідає точному
розв'язку задачі згідно з класичним
методом сил. Наведемо це розв’язання.
,
що повністю відповідає точному
розв'язку задачі згідно з класичним
методом сил. Наведемо це розв’язання.
Балка, зображена на рис. 5.3, згідно з методом сил, тричі статично невизначена.
Запишемо канонічні рівняння за цим методом:
![]() .
.
Щ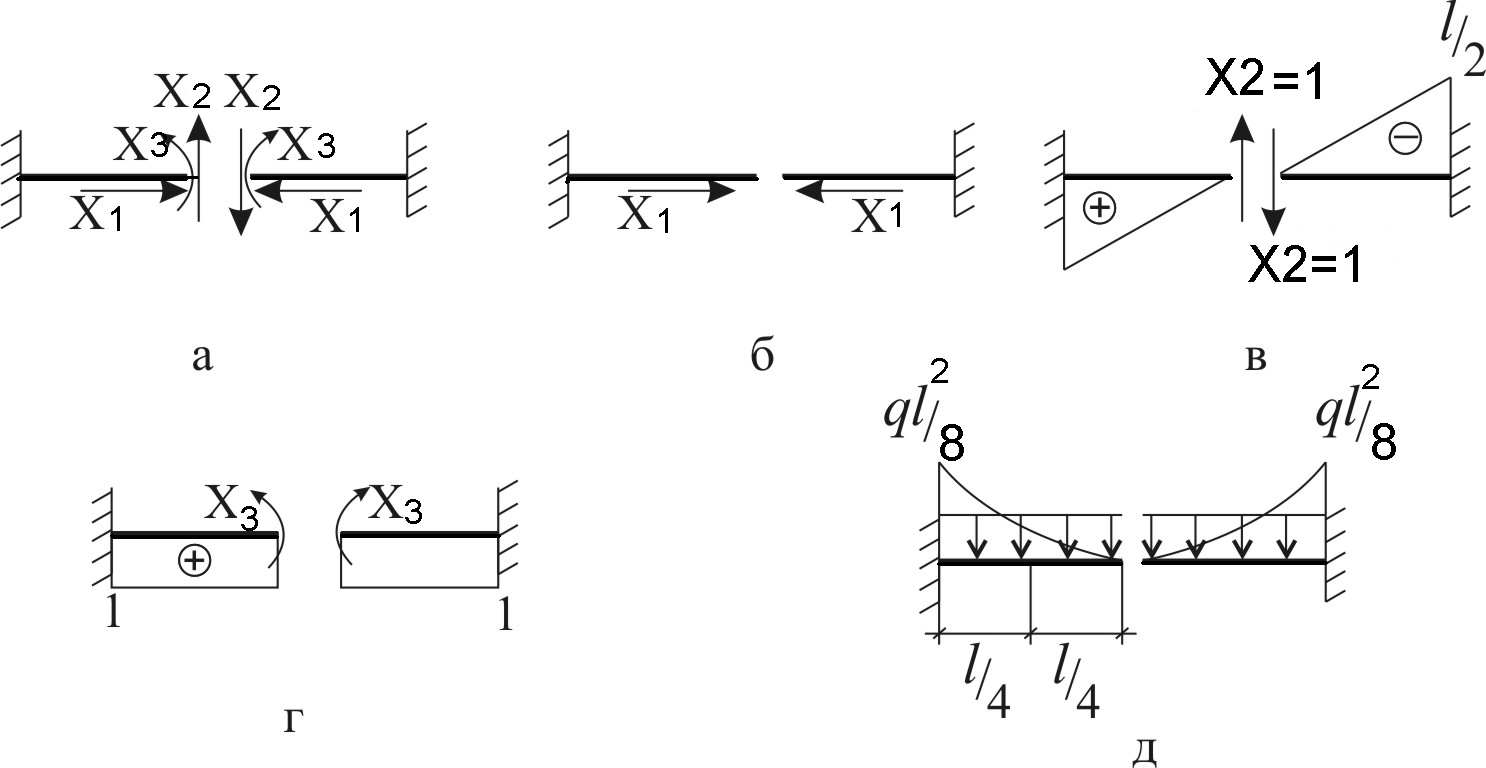 об
визначити коефіцієнти цих рівнянь,
виберемо основну систему методу сил
і побудуємо одиничні й вантажні епюри.
об
визначити коефіцієнти цих рівнянь,
виберемо основну систему методу сил
і побудуємо одиничні й вантажні епюри.
Рисунок 5.4 –
Основна система методу сил (а) та епюри:
![]()
![]()
![]()
![]()
Визначаємо коефіцієнти канонічних рівнянь:
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Отже, канонічна система запишеться у вигляді
![]()
Корені
системи:
![]() ;
;
![]() ;
;
![]() .
.
Далі
маємо:
![]() ;
;
![]() ;
;
![]() .
.
Шукані епюри зображено на рис. 5.5.

Рисунок 5.5 – Остаточні вантажна епюра Мр (а) та одинична епюра М1 в основній системі (б )
Щоб визначити переміщення середини балки, скористаємось формулою Сімпсона - Карнаухова
![]() ,
(5.16)
,
(5.16)
де А, С, В – відповідно, початок, середина та кінець стержня.
Побудуємо одиничну епюру в основній системі (див. рис. 5.5. б)
І перемножимо за (5.16) з вантажною епюрою моментів Мр (див. рис. 5.5. а):
![]() .
.
Приклад ІІІ. Визначення стійкості системи з двома ступенями віль-
ності.
Для системи з двома ступенями вільності, показаної на рис. 5.6, знайти критичні сили, при яких можливе відхилення від рівноважного стану системи. Опори С і D – пружно-піддатливі з коефіцієнтом твердості r (r – це реакція в опорі при одиничному переміщенні її по вертикалі) .

Рисунок 5.6 – Розрахункова схема системи з двома ступенями вільності
Розв'язання. Розв'яжемо задачу, так званим, методом варіацій функції
![]() ,
,
(варіацією називають нескінченно малу зміну функції при фіксованому значенні належної змінної х ).
Виконуємо дії за таким планом:
І. Обумовлюємо форму втрати стійкості з точністю до двох ступенів вільності а1 і а2 (їх фізична суть це віртуальні лінійні переміщення точок С і D ). Тоді робота зовнішніх сил
![]() ,
,
де
![]() - поворот системи при зміщенні її кінця
- поворот системи при зміщенні її кінця
![]() .
.
Для
першої ланки маємо
![]() ,
для другої
,
для другої
![]() ,
для третьої
,
для третьої
![]() .
.
Отже,
 .
.
Робота
внутрішніх сил:
![]() .
.
2. Записуємо вираз для потенційної енергії системи
![]()
у
вигляді
![]() .
.
3.
З умов екстремуму функції
![]() маємо:
маємо:
![]() ;
;
![]() .
.