ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17260
Скачиваний: 51
THE MICROPHONE BOOK
68
pickup, relative to total pickup, of the first-order cardioids, and as such
is useful for pickup over a wide frontal angle in the studio.
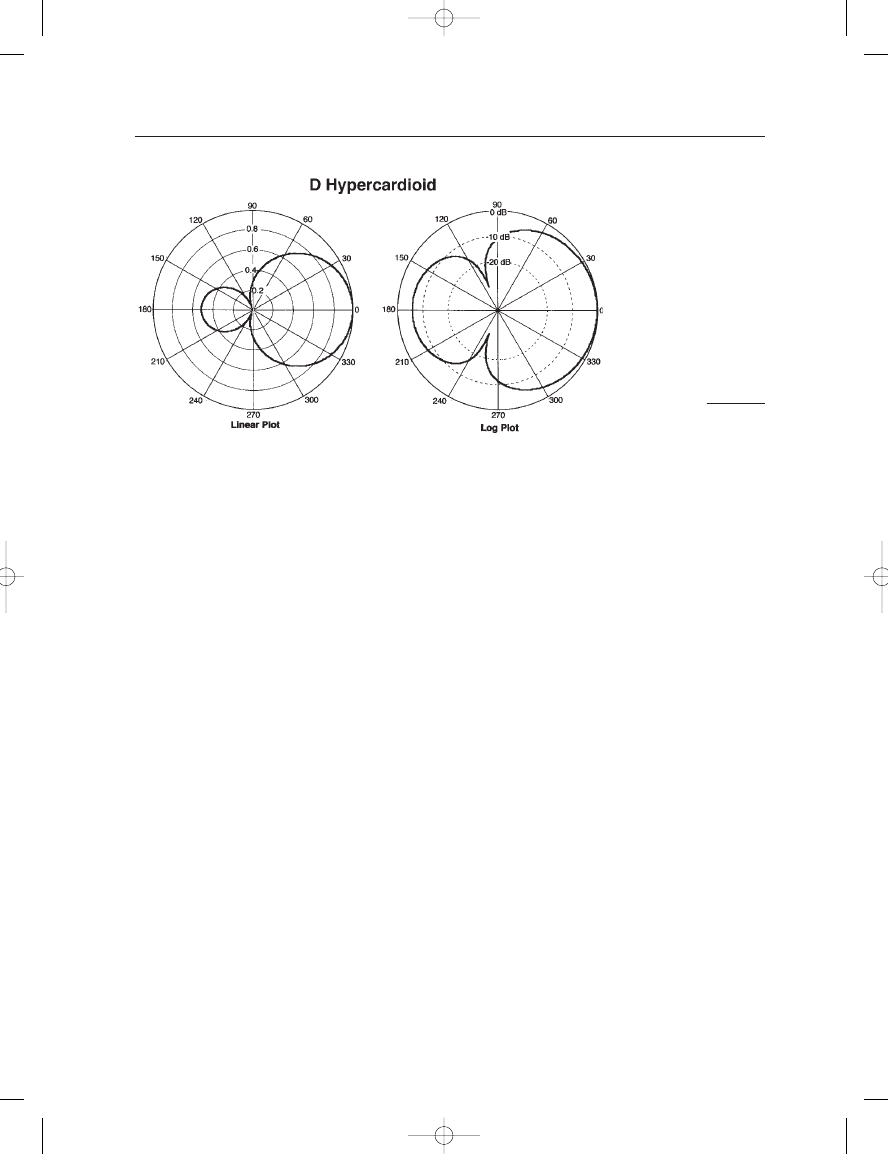
The hypercardioid: This pattern is represented by the polar equation:
0.25 0.75 cos
(5.6)
The pattern is shown in Figure 5–3D. Directional response is
12 dB at
90 and 6 dB at 180. This pattern exhibits the greatest random effi-
ciency, or “reach,” in the forward direction of all members of the first-
order cardioid family. In the reverberant field, this pattern will provide the
greatest rejection, relative to on-axis pickup, of reverberant sound.
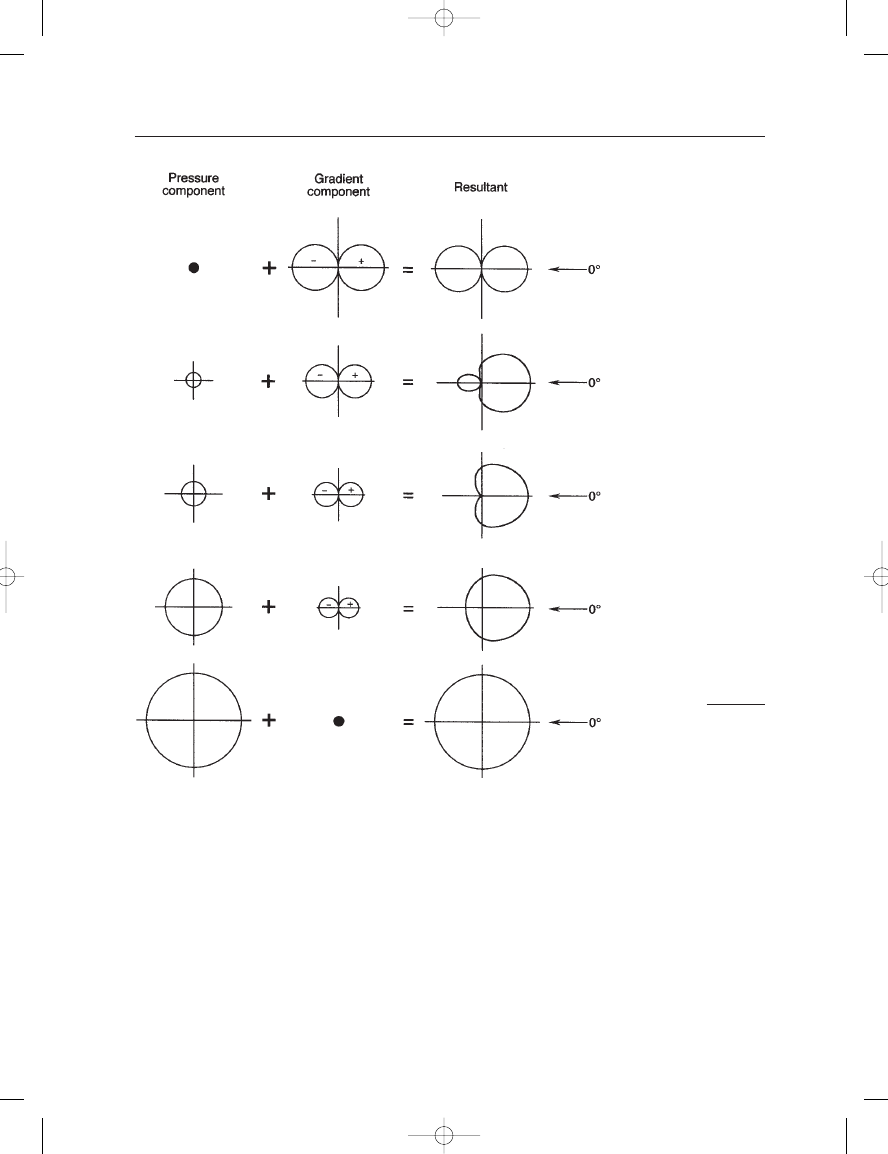
FIGURE 5–2
Various combinations of
pressure and gradient
components and their
resultant patterns.
Earg_05.qxd 14/9/04 2:40 PM Page 68
5: First-Order Directional Microphones
69
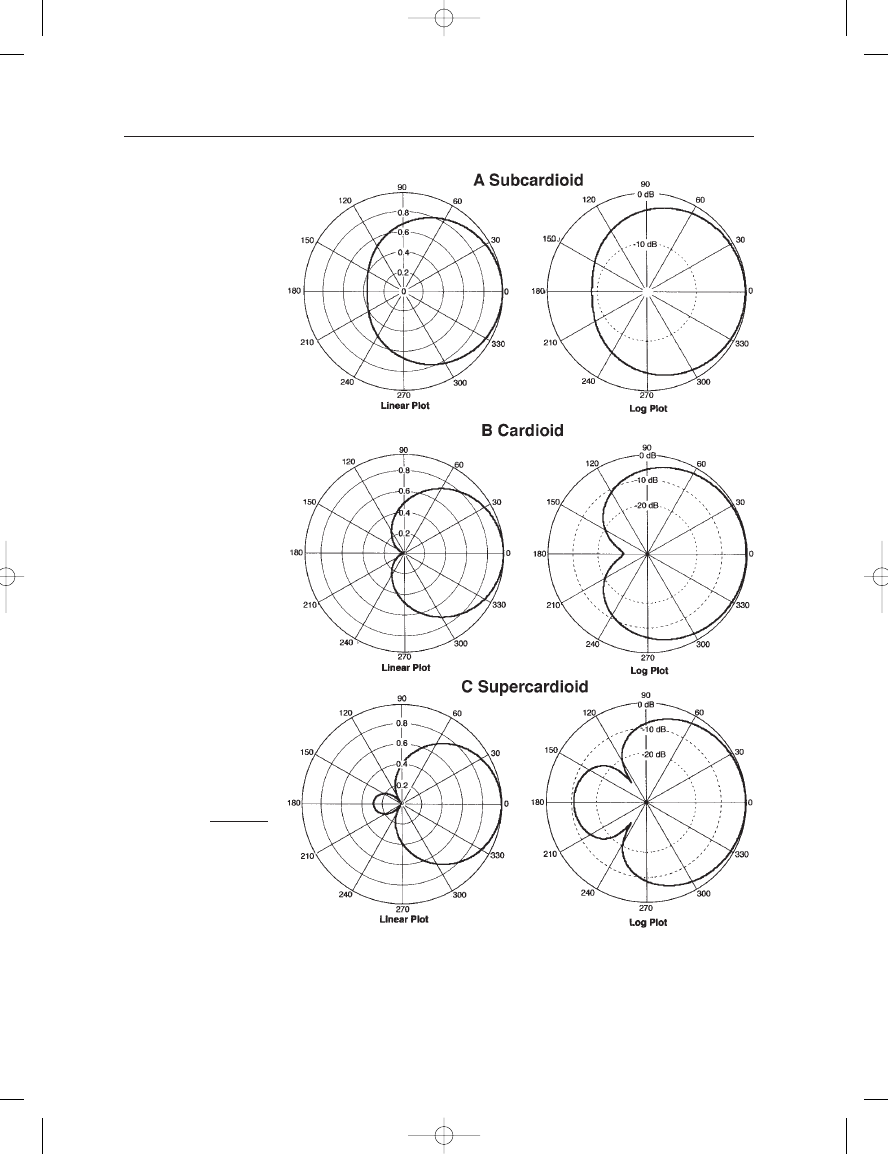
FIGURE 5–3
Polar graphs, linear and
logarithmic, for the
following patterns:
subcardioid (A); cardioid
(B); supercardioid (C); and
hypercardioid (D).
Earg_05.qxd 14/9/04 2:40 PM Page 69
THE MICROPHONE BOOK
70
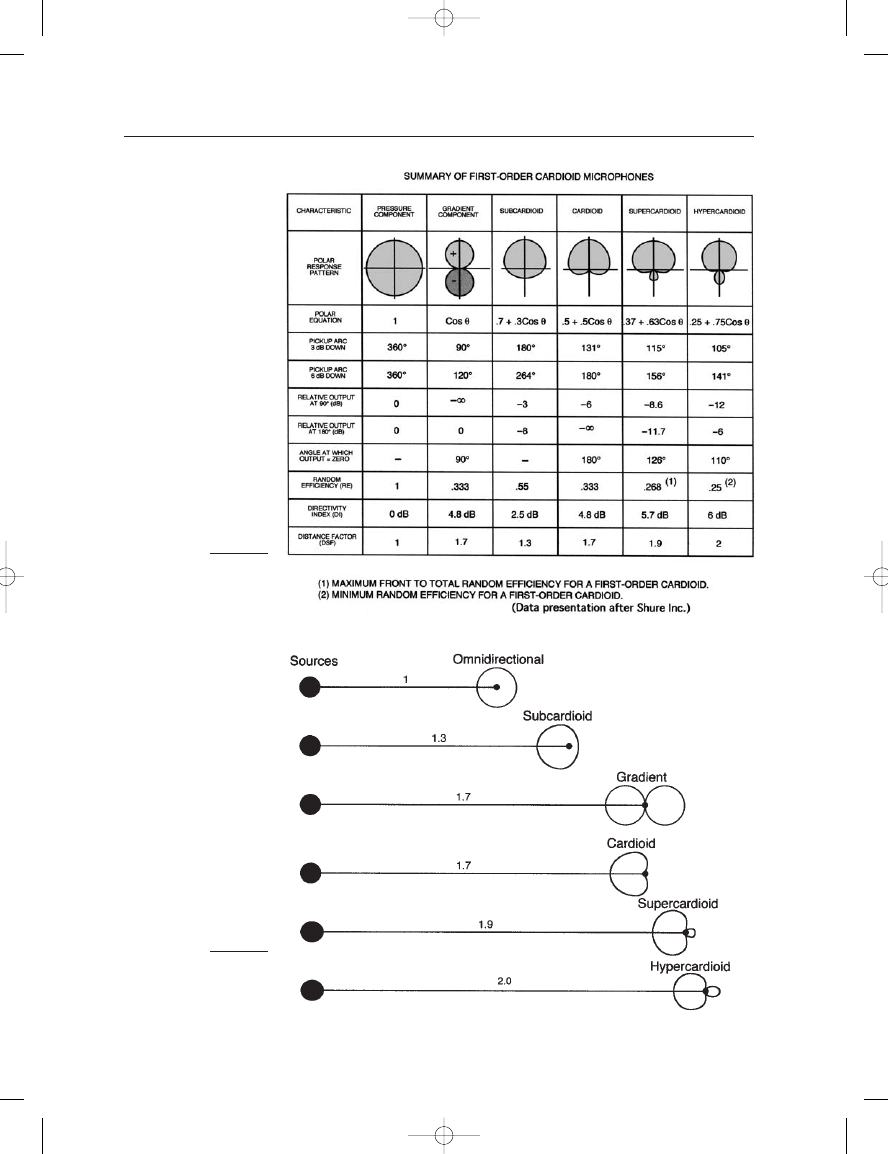
SUMMARY OF FIRST-ORDER CARDIOID PATTERNS
Figure 5–4 shows in chart form the principal characteristics of the first-
order cardioids. While most of the descriptions are self evident, two of
them need additional comment:
Random Efficiency (RE): RE is a measure of the on-axis directivity
of the microphone, relative to its response to sounds originating from all
directions. An RE of 0.333, for example, indicates that the microphone
will respond to reverberant acoustical power arriving from all directions
with one-third the sensitivity of the same acoustical power arriving along
the major axis of the microphone. (The term random energy efficiency
(REE) is also used.)
Distance Factor (DF): Distance factor is a measure of the “reach” of
the microphone in a reverberant environment, relative to an omnidirec-
tional microphone. For example, a microphone with a distance factor of
2 can be placed at twice the distance from a sound source in a reverber-
ant environment, relative to the position of an omnidirectional micro-
phone, and exhibit the same ratio of direct-to-reverberant sound pickup
as the omnidirectional microphone. These relationships are shown in
Figure 5–5 for several first-order patterns.
There are three distinctions in directional patterns that concern the
engineer. In many applications, especially in sound reinforcement, the
reach of the microphone is important for its ability to minimize feedback.
In the recording and broadcast studios, the forward acceptance angle is
important in defining the useful pickup range and how the performers
must be arrayed. Under similar operating conditions, the rejection of off-
axis sound sources may be equally important.
These considerations lead to several important distinctions among
subcardioid, cardioid, supercardioid, and hypercardioid patterns. Note
for example that the response at
90 varies progressively from sub- to
FIGURE 5–3
Continued.
Earg_05.qxd 14/9/04 2:40 PM Page 70
5: First-Order Directional Microphones
71
FIGURE 5–5
Illustration of distance
factor (DF) for the
first-order cardioid family.
FIGURE 5–4
Characteristics of the
family of first-order
cardioid microphones.
Earg_05.qxd 14/9/04 2:40 PM Page 71
hypercardioid over the range of
3 to 12 dB. The effective 6 dB
included frontal angle varies progressively from sub- to hypercardioid
over the range of 264
to 141, while the distance factor varies from 1.3
to 2. The back rejection angle varies from 180
for the cardioid to 110
for the hypercardioid. As a function of the B term in equation (5.2), we
have the following definitions:
Randon Efficiency (RE)
1 2B 4B
2
/3
(5.7)
Front-to-Total Ratio (FTR)
REF/RE
(5.8)
where
REF
0.5 0.5B B
2
/6
(5.9)
Front-to-Back Ratio (FBR)
REF/REB
(5.10)
where
REB
0.5 1.5B 7B
2
/6
(5.11)
Continuous values of these quantities from B
0 to B 1 are shown
in Figure 5–6A, B and C. The figures are labeled to show the maximum
values of the functions (Bauer, 1940 and Glover, 1940). It is from this
data that the accepted definitions of the supercardioid and hypercardioid
patterns were taken.
FIRST-ORDER CARDIOID PATTERNS
IN THREE DIMENSIONS
We can draw microphone patterns only in two-dimensional form, and
it is easy to forget that the patterns actually exist in three dimensions,
as suggested in Figure 5–7. For microphones that are end addressed,
these patterns exhibit consistent rotational symmetry, since the micro-
phone case lies along the 180
angle relative to the major axis. Side
addressed microphones may exhibit slightly asymmetrical patterns,
inasmuch as the body of the microphone lies along a 90
angle from the
major axis.
EXAMPLES OF EARLY DUAL-ELEMENT
DIRECTIONAL MICROPHONES
Figure 5–8 shows details of the Western Electric/Altec 639 multi-pattern
microphone. It consists of a ribbon element and a moving coil pressure
element in a single housing. The two outputs are summed, and a switch
varies the ratio between them producing a family of polar patterns.
Because of the relatively large spacing between the elements, accurate
frequency response and polar integrity are difficult to maintain beyond
about 8 kHz. It can easily be seen that precise alignment of the two
elements is critical to their proper summation.
THE MICROPHONE BOOK
72
Earg_05.qxd 14/9/04 2:40 PM Page 72