ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17259
Скачиваний: 51
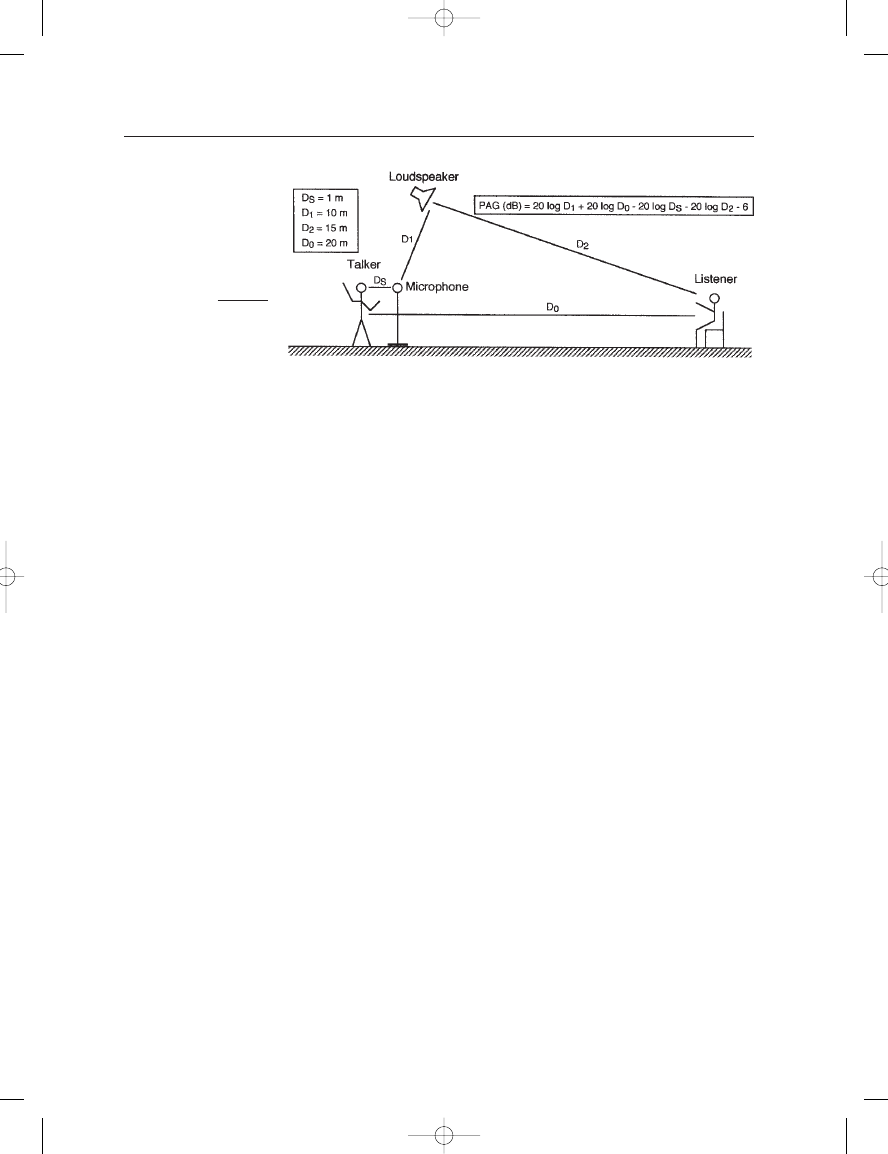
loudspeaker, and listener; these are separated by the distances D
S
, D
0
, D
1
and D
2
, as shown.
Assume that the unaided talker produces an average speech level of
65 dB L
P
at the microphone, 1 m (40 in) away. By inverse square law, the
level at the listener will be 26 dB lower, or 39 dB L
P
(see Chapter 2 under
Acoustical Power). Both the loudspeaker and microphone are assumed
to be omnidirectional.
When the system is turned on, the electrical gain of the micro-
phone/loudspeaker combination can be increased until the loudspeaker
provides a level from the microphone equal to that of the talker, or
65 dB. This condition produces unity gain through the system, and this
results in acoustical feedback through the system as shown in
Figure 18–3. Feedback causes the familiar “howling” effect that we have
all heard with improperly controlled sound reinforcement systems.
To have a workable system it will be necessary to reduce the system
gain by about 6 dB, which should result in an acceptable stability margin.
When this adjustment has been made, the loudspeaker will now produce
a signal level at 10 m (33 ft) (distance from the loudspeaker to the micro-
phone) of 59 dB.
Now, we determine what level the loudspeaker will produce at the
listener at a distance of 15 m (50 ft). Again, by inverse square law, we
calculate that level to be 55.5 dB.
The acoustical gain of the system is defined as the difference in level
at the listener with the system off compared to the level at the listener
with the system on:
Acoustical gain
55.5 dB 39db 16.5 dB.
A general equation for the potential acoustic gain (PAG) in dB that
an outdoor system can produce is:
PAG
20 log D
1
20 log D
0
20 log D
s
20 log D
2
6
(18.1)
Later, we will see how the use of more directional microphones and
loudspeakers can improve the maximum acoustical gain of a system.
Another graphical way of looking at the acoustical gain of the sys-
tem is shown in Figure 18–4. We may think of the system as effectively
18: Fundamentals of Speech and Music Reinforcement
303
FIGURE 18–2
Basic elements of an
outdoor speech
reinforcement system.
Earg_18.qxd 14/9/04 3:01 PM Page 303
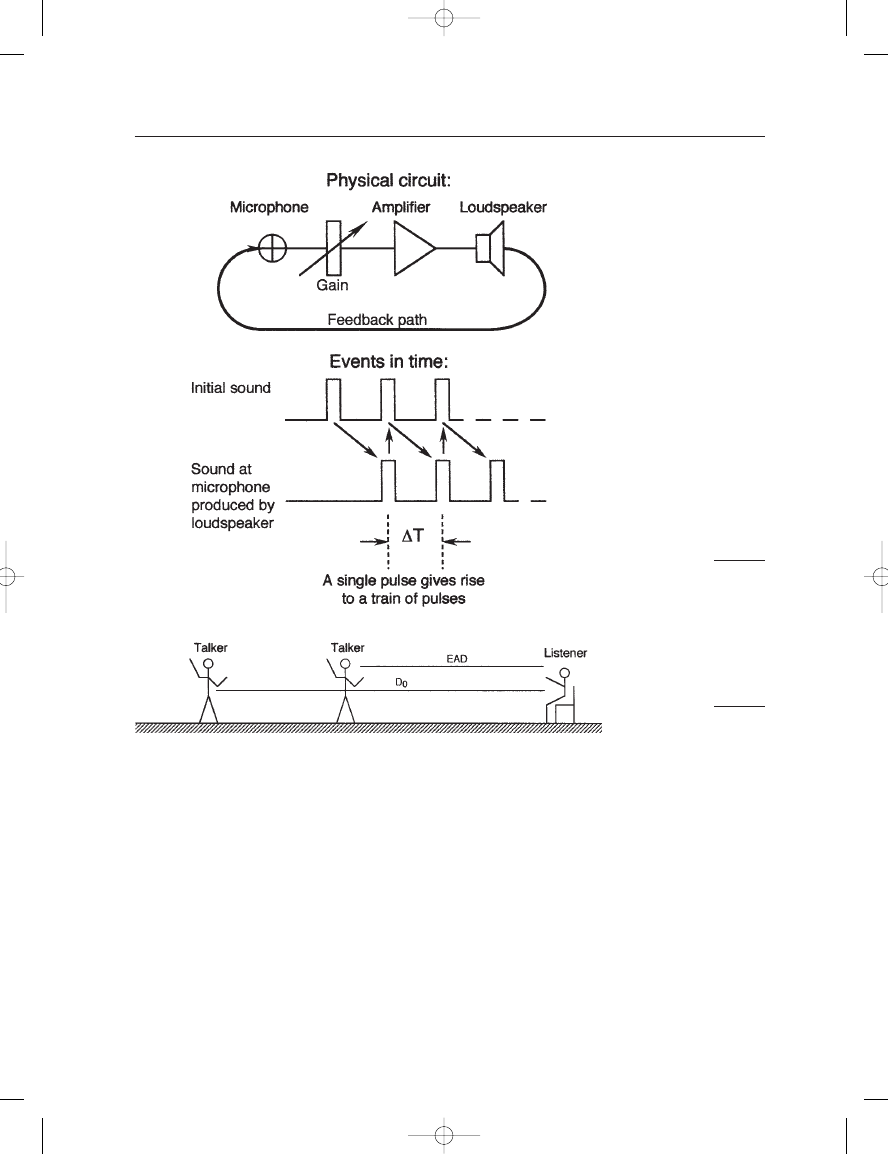
moving the listener closer to the talker. When the system is off, the
distance is of course D
0
, or 20 m (66 ft). When the system is turned on,
the talker has in a sense “moved forward” toward the listener. This “new
listening distance” is known as the equivalent acoustic distance (EAD).
We can calculate EAD by considering the following two facts: the talker
produces a level of 65 dB at a distance of 1 m (40 in), and with the system
turned on the listener hears the talker at a level of 55.5 dB.
We now ask the question: at what distance from the talker will the level
have dropped to 55.5 dB? The level difference is 65
55.5, or 9.5 dB.
Using the nomograph shown in Figure 2–7 we can see directly that level
attenuation of 9.5 dB corresponds to a distance of about 3 m (10 ft),
relative to a reference distance of 1 m (40 in). Therefore, with the system
turned on, the listener will hear the talker as if that talker were located
at a distance of 3 m (10 ft) from the listener.
THE MICROPHONE BOOK
304
FIGURE 18–3
The origin of acoustical
feedback.
FIGURE 18–4
The concept of EAD.
Earg_18.qxd 14/9/04 3:01 PM Page 304
ANALYSIS OF AN INDOOR SPEECH
REINFORCEMENT SYSTEM
When we move the speech reinforcement system indoors its analysis
becomes a bit more complicated. The inverse square attenuation with
distance that we observed outdoors has now been replaced with a com-
bination of inverse square loss and indoor reverberant level produced by
room reflections.
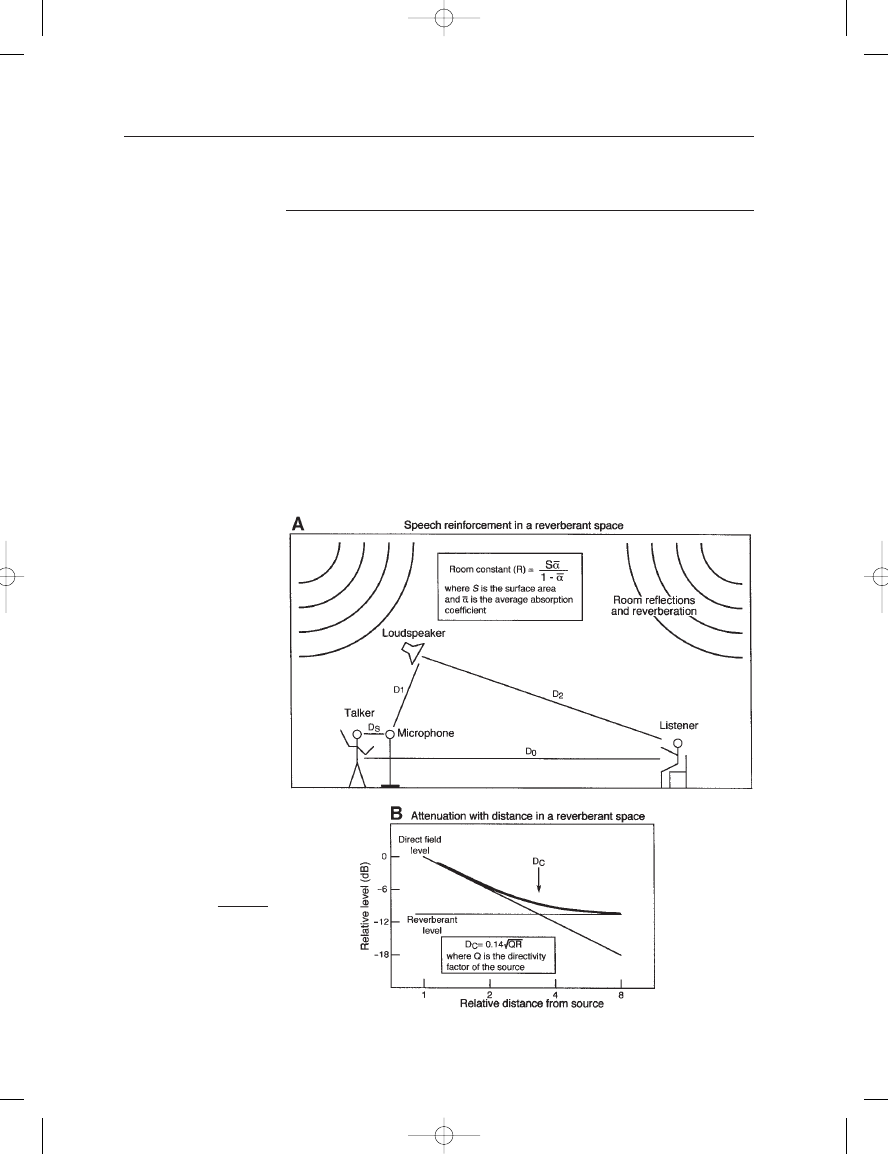
An indoor system is shown in Figure 18–5A. We can see the inverse
square paths to the listener, along with the reflected contributions from
the room. When we look at the total contribution of both direct and
reflected sound, the picture is as shown at B. Close to the source, the
attenuation with distance follows the inverse square relationship; how-
ever, at some given distance, the reverberant field begins to dominate.
The reverberant field is fairly uniform throughout the room, and at
distances far from the loudspeaker the reverberant field is dominant. As
we discussed in Chapter 2 (under The Reverberant Field) the distance
from the loudspeaker at which both direct and reverberant fields are
18: Fundamentals of Speech and Music Reinforcement
305
FIGURE 18–5
An indoor speech
reinforcement system:
system layout (A);
attenuation of sound with
distance in a reverberant
environment (B).
Earg_18.qxd 14/9/04 3:01 PM Page 305
equal is known as critical distance (D
C
). At D
C
, the level is 3 dB higher
than either of its components. In this example we are assuming that
both talker and microphone are in the reverberant field produced by the
loudspeaker.
A complete analysis of the PAG of an indoor system is fairly com-
plex, but it basically takes the D terms in equation (18.1) and converts
them to limiting values of critical distance. When this is done, two of the
log terms in the equation cancel, and the net result is:
PAG
20 log D
CT
20 log D
s
6 dB
(18.2)
where D
CT
is the critical distance of unaided talker in the direction of the
listener, and D
S
is the talker-to-microphone distance.
The critical distance may be calculated by the equation:
(18.3)
where Q is the directivity factor of the sound source and R is the room
constant in the enclosed space. The room constant is:
(18.4)
where S is the surface area in the space and
is the average absorption
coefficient in the space. (Note: the value of R is expressed in either square
meters or square feet, depending on the system of units being used in the
calculations.)
When we examine equation (18.2), we can see that the first term is
dependent on the room characteristics and cannot easily be changed.
Thus, the second term is the only one that we can easily change. This is
intuitively clear; the best (and easiest) way to increase the potential gain
of an indoor system is simply to move the microphone closer to the
talker. In addition, the use of a directional microphone and employment
of loudspeakers that aim the bulk of their output directly at the fairly
absorptive audience will also improve system gain.
FACTORS THAT DETERMINE INDOOR SPEECH
INTELLIGIBILITY
In an indoor environment there are three factors that largely determine
how intelligible transmitted speech will be:
1. Signal-to-noise ratio (dB). This is the ratio of average speech levels
to the A-weighted local noise level. For best intelligibility, a signal-
to-noise ratio of 25 dB or greater is recommended.
2. Room reverberation time (s). When the reverberation time exceeds
about 1.5 s, the overhang of successive syllables will have a detri-
mental effect on intelligibility. Strong room echoes in particular will
have a deleterious effect on intelligibility.
R
S
1
(square
units)
D
C
0.14
QR
(meters
or
feet)
THE MICROPHONE BOOK
306
Earg_18.qxd 14/9/04 3:01 PM Page 306
3. Direct-to-reverberant (D/R) speech level (dB). When this ratio is
less than about 10 dB, the reverberant level tends to mask speech in
much the same way that random noise does.
In a later section we will discuss some of the methods by which the
intelligibility of a speech reinforcement system may be estimated while
system layout is still at the design stage.
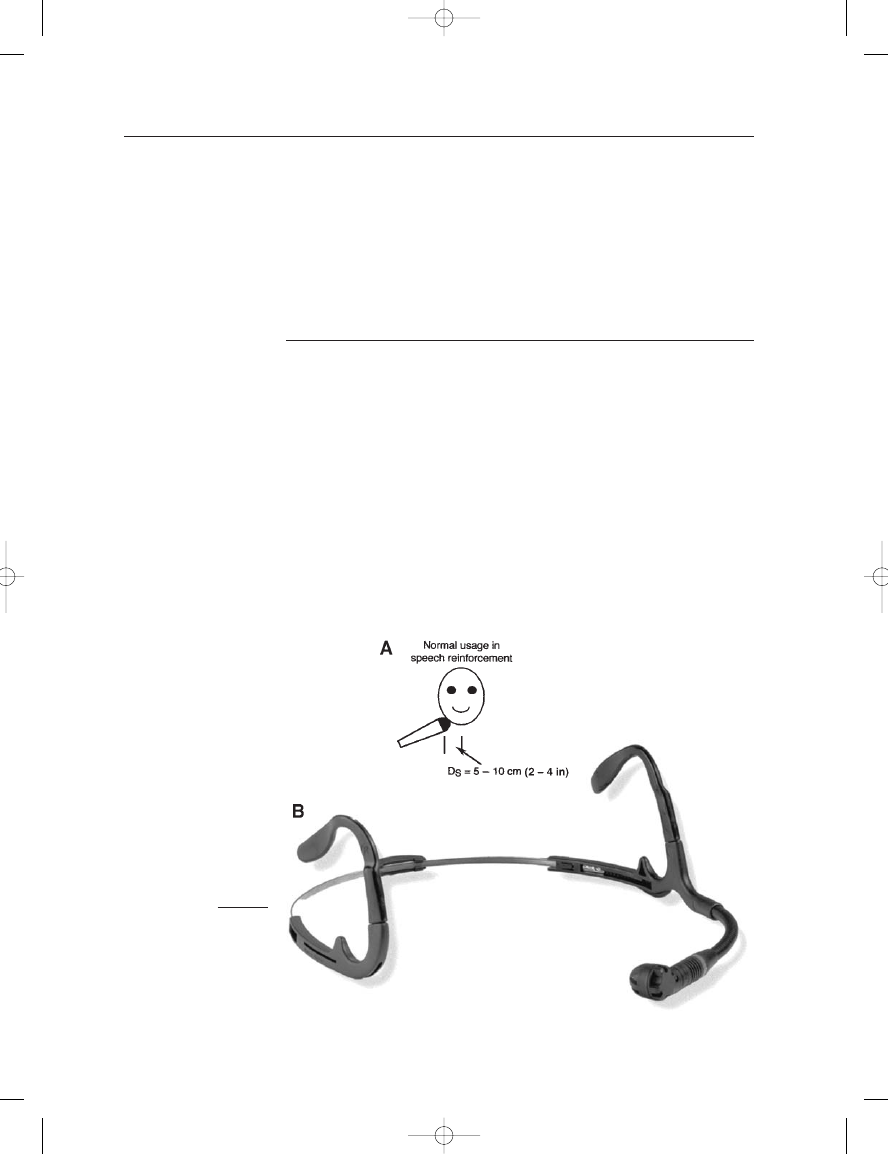
MICROPHONES FOR SPEECH REINFORCEMENT
Figures 18–6 and 18–7 show some of the microphone types that are
used in speech reinforcement. The hand-held vocal microphone is used
as shown at Figure 18–6A. Vocal microphones are normally designed so
that they produce fairly flat response when positioned about 5 to 10 cm
(2 to 4 in) from the performer’s mouth. (Typical response of a vocal
microphone is shown in Figure 7–2.) At such small operating distances,
the vocal microphone is fairly immune to feedback – a classic example
of reducing D
S
to a very low value. The best microphones for vocal use
are those that have integral multiple screening surrounding the capsule
to minimize the effects of inadvertent puffs of wind from the talker.
Many of these microphones have a pronounced “presence peak” in the
3–5 kHz range for added brightness and improvement of articulation.
Many performers feel very much at home with a vocal microphone in
hand – and they often feel at a loss without it. Proper microphone etiquette
must be learned; never blow on the microphone to see if it is on; always
18: Fundamentals of Speech and Music Reinforcement
307
FIGURE 18–6
Microphones for speech
reinforcement; the
handheld vocal microphone
(A); head-worn microphone
(B). (Photo courtesy of
AKG Acoustics.)
Earg_18.qxd 11/10/04 6:00 PM Page 307