ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 17249
Скачиваний: 51
AN ADAPTIVE HIGH-DIRECTIONALITY
MICROPHONE
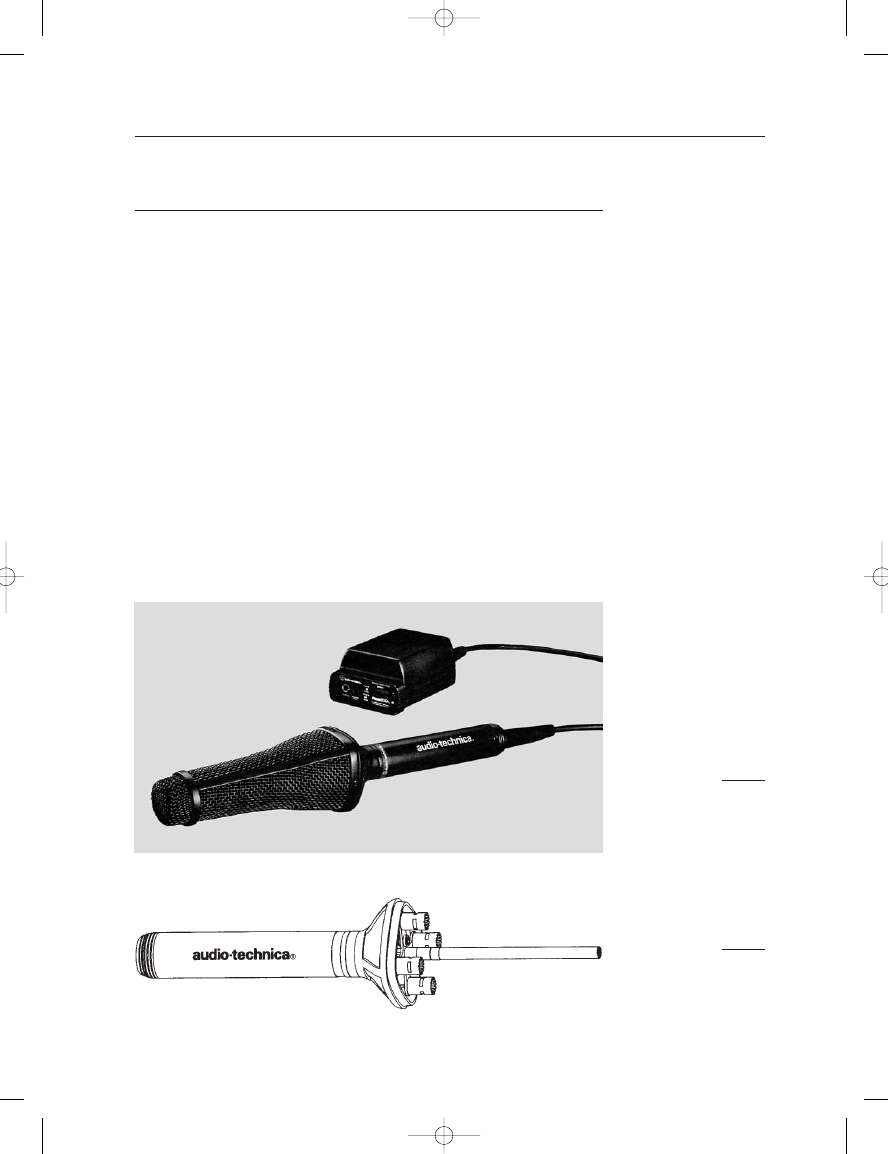
The Audio-Technica model AT895 microphone is shown in Figure 19–11,
and a view of its elements is shown in Figure 19–12. The center element
is a short-section line microphone of the type discussed in Chapter 6, and
the four capsules at the base are cardioids. In normal operation, opposite
pairs of cardioids are subtracted to produce a pair of figure-8 patterns at
MF and LF which are oriented 90
to each other. These resulting patterns
are perpendicular to the line element and thus do not pick up sound along
the main axis of the microphone. They do of course pick up sound at
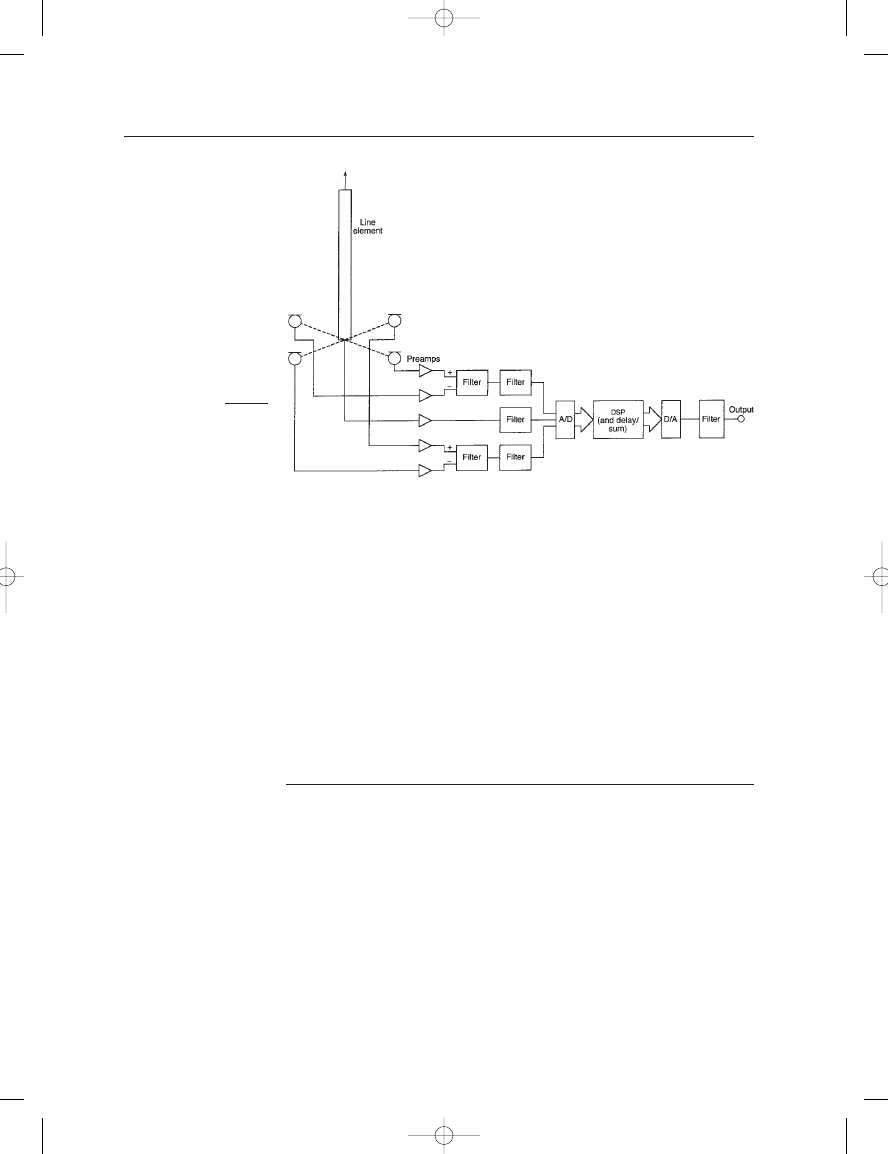
MF and LF arriving at right angles to the line element. The signal flow
diagram of the system is shown in Figure 19–13.
The adaptive portion of the system, which is digital, derives signal
correlation values among the three outputs from the microphone ele-
ments and determines, on a continuing basis, the amount of interfering
sound level at MF and LF. The interfering signals are added to the out-
put of the line element in reverse polarity so that cancellation takes place
at MF and LF. Much of the art in development of the system was in
determining the range of operation, both in level manipulation and fre-
quency, and also the time constants necessary for smooth, unobtrusive
operation.
THE MICROPHONE BOOK
328
FIGURE 19–11
Photo of Audio-Technica
model AT895 adaptive
microphone. (Photo courtesy
of Audio-Technica US, Inc.)
FIGURE 19–12
Positions of microphone
elements. (Figure courtesy
of Audio-Technica US, Inc.)
Earg_19.qxd 14/9/04 3:05 PM Page 328
There are three basic modes of system operation:
1. All elements operating. This produces maximum rejection of inter-
fering signals.
2. Line element plus one figure-8 set. This produces rejection only in
one pickup plane; useful under conditions where interfering sources
are largely confined to the ground plane.
3. Line element operating alone, with optimum filtering.
The microphone is intended primarily for activities such as news
gathering and sports events, where interfering sounds may be constantly
changing in directional bearing.
ECHO CANCELLATION
Modern conference systems allow users in one location to communicate
easily with another group at some distance. Duplex operation of the
systems permits conversation to proceed freely in both directions and is
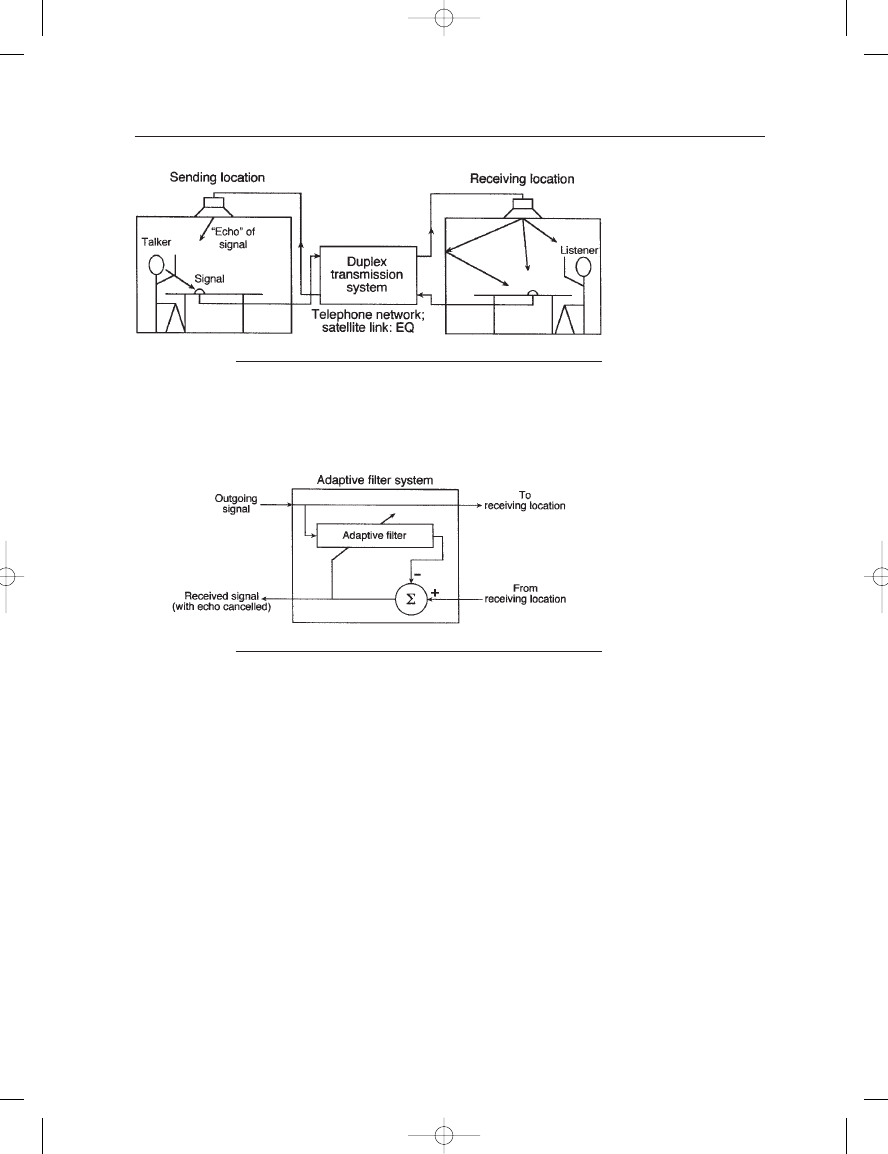
normally a basic requirements of these systems. A fundamental problem
exists in a simple system, such as that shown in Figure 19–14. If talkers
in one location are communicating with a distant location, they will hear
their own voices delayed by the cumulative characteristics of the trans-
mission path as the signal passes through the loudspeaker-microphone
pair at the receiving end and is returned to the sending location.
These “echoes” may occur in a fraction of a second – or they may,
as in the case of satellite links, be in the range of a second or longer. In
addition, the return signal will exhibit noise as well as the acoustic
19: Overview of Microphone arrays and Adaptive Systems
329
FIGURE 19–13
Signal flow diagram
for AT895 adaptive
microphone. (Figure after
Audio-Technica US, Inc.)
Earg_19.qxd 14/9/04 3:05 PM Page 329
signature of the receiving location. There may be equalization changes
due to a variety of other transmission effects and, taken as a group, these
effects will be quite disturbing to anyone attempting to communicate
over the system.
Adaptive filtering can be used to alleviate these problems, and
operation of the filter is shown in Figure 19–15. Because it is a generic
filter, it can provide delay functions along with equalization. The filter is
located at the sending end of the system and actually “models” the down-
stream transmission and return paths, comparing their output with the
original signal from the sending location. The filter is placed in a negative
feedback loop that actively “seeks” to reduce the difference between the
original and received signals to zero, thus cancelling the echo.
In modern systems, the initialization of the system is an automatic
process and usually takes place in a matter of a second or so after the
THE MICROPHONE BOOK
330
FIGURE 19–14
A basic duplex (two-way) conferencing system: signals originating at the sending location
are reproduced at the receiving location via a loudspeaker; the return signal heard by the
original talker will be delayed by the transmission path and further contaminated by
room reflections at the receiving end.
FIGURE 19–15
Adaptive filtering can be used to cancel the “echo” of the original signal from the
sending end; the adaptive filter system intercepts the original signal and compares it with
the return signal; any differences are forced to zero via a negative feedback path, and the
signal returned to the sender is thus free of the echo.
Earg_19.qxd 14/9/04 3:05 PM Page 330
system is turned on. Once initialized, the system remains fairly station-
ary; updating itself only when there is a substantial change in the overall
signal path, such as moving the microphone, opening or closing doors,
and the like, at the receiving end.
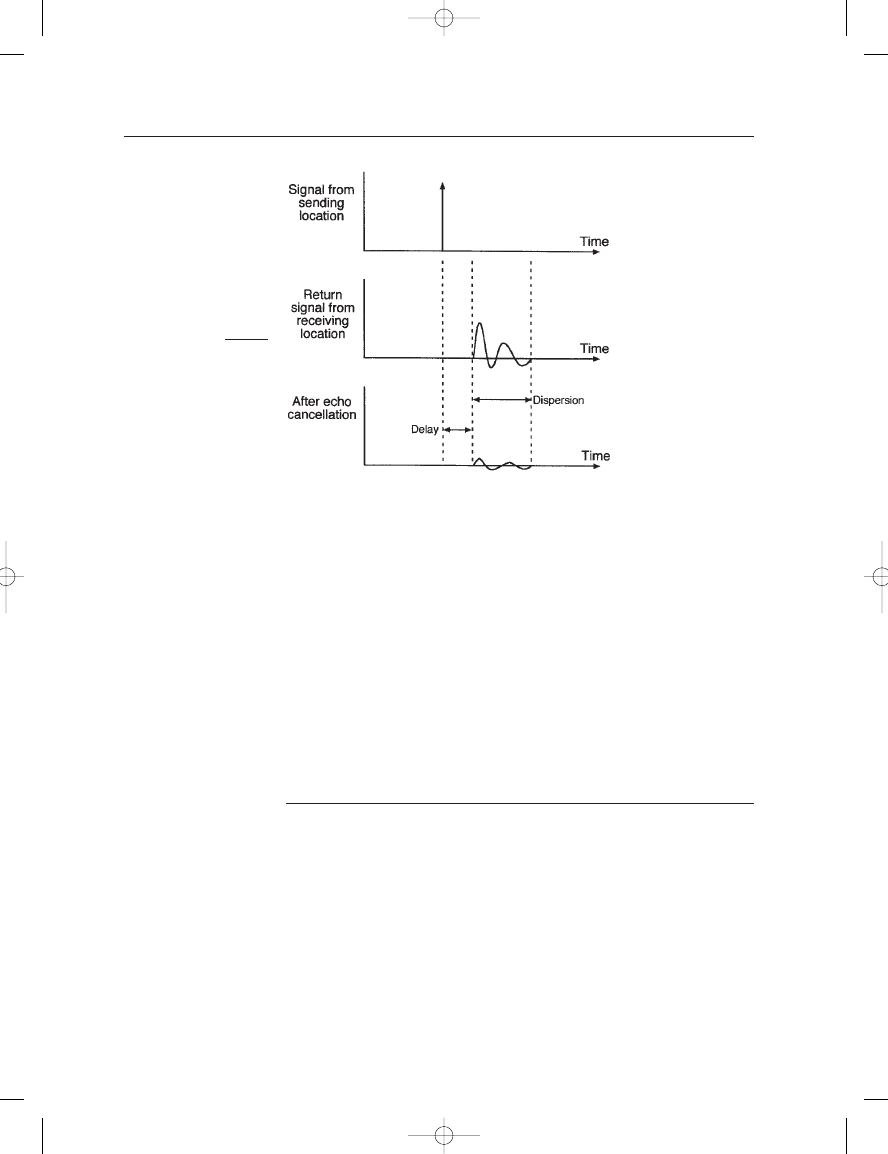
Figure 19–16 shows typical action of the adaptive filter. The origi-
nating signal is modeled as an impulse at A, and the cumulative effects
of round-trip transmission are shown at B. The cancelled signal is shown
at C. Note that the direct-through path from the microphone at the
receiving end is outside the filter’s feedback loop and is fed directly back
to the loudspeaker at the sending end. Thus, the communication path
remains open at both ends at all times.
Modern systems are quite stable, provide more than adequate gain,
and can handle a number of microphones through automatic gating.
Woolley (2000) provides an excellent overview of the subject.
“VIRTUAL” MICROPHONES
Kyriakakis et al. (2000, 2002) describe the concept of a virtual microphone
in the context of a classical orchestral recording in which the outputs of
selected microphones may be encoded at a low bit rate and reconstructed
later as needed. Figure 19–17 shows a partial layout for an orchestral
recording session; there are two main microphones (an ORTF pair) and a
single accent microphone for timpani pickup. (In actuality there would be
many more microphones, but for our discussion here we will consider
only the main pair and a single accent microphone.)
We will record the primary ORTF microphone pair at the full data
rate, but the timpani microphone is to be recorded as a virtual micro-
phone. The timpani microphone signal will be a subset of the left ORTF
19: Overview of Microphone arrays and Adaptive Systems
331
FIGURE 19–16
The original signal is
returned with delay (echo)
and further acoustical
contamination; the
adaptive filter cancels these
effects to a large degree.
(Data presentation after
Aculab.)
Earg_19.qxd 14/9/04 3:05 PM Page 331
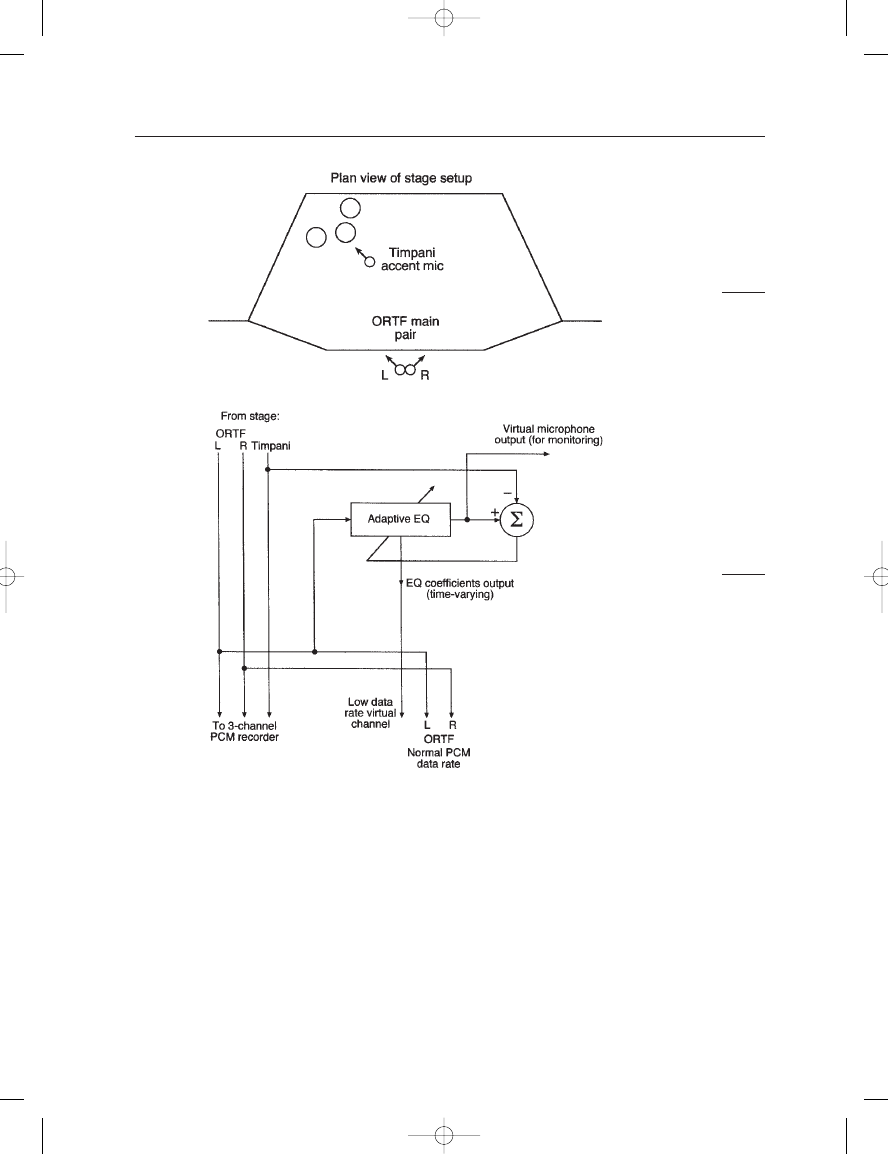
channel signal. This subset consists of filter coefficients that define, on a
moment by moment basis, the output of the timpani microphone in
terms of the overall spectrum picked up by the left ORTF microphone.
The left ORTF channel has been chosen for this purpose since its pattern
and orientation contain substantial signal from the timpani.
On playback, the virtual output of the timpani microphone will be
recovered by time-varying equalization of the left ORTF signal via
an adaptive filter. The filtering generates low data rate coefficients which
are stored during the recording operation, resulting in a continuous
“re-equalization” of the left ORTF signal so that its spectrum is identi-
cal to that of the actual timpani microphone signal. This process is
shown in Figure 19–18.
THE MICROPHONE BOOK
332
FIGURE 19–17
Basic layout for a classical
recording session; only the
main microphone pair and
a single accent microphone
are shown for clarity.
FIGURE 19–18
A normal digital (PCM)
recording path shown at
the left in the figure; the
path shown at the right
stores the virtual timpani
track as a time-varying set
of adaptive equalization
coefficients, which can later
be convolved with the left
ORTF signal to produce a
reconstruction of the
original timpani signal.
Earg_19.qxd 14/9/04 3:05 PM Page 332