ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.12.2021
Просмотров: 522
Скачиваний: 5

21
1.3.
Для
управлений
асинхронными
двигателями
широко
используются
релейно
-
контактные
аппараты
.
При
релейно
-
контактном
управлении
электродвигателем
процесс
его
пуска
обычно
автоматизируется
,
что
устраняет
возможные
при
ручном
управлении
ошибки
.
Для
пуска
электродвигателя
от
персонала
в
этом
случае
требуется
лишь
нажать
кнопку
управления
или
повернуть
в
рабочее
положение
рукоятку
командоконтроллера
.
У
асинхронных
электродвигателей
с
фазным
ротором
пусковые
резисторы
шунтируются
по
сту
-
пеням
при
помощи
контакторов
,
управле
-
ние
которыми
осуществляется
в
функции
ЭДС
,
тока
или
времени
согласно
заданию
(
см
.
приложение
1).
1.4.
Добавочное
сопротивление
,
введенное
в
цепь
ротора
,
определяют
,
используя
выражение
:
доб
н
н
p
e
R
R
R
S
S
2
2
2
+
=
(17)
где
S
e
, S
p
–
скольжения
при
работе
с
М
=
М
с
на
естественной
и
искусственной
механических
характеристиках
соответственно
;
R
2
доб
–
добавочное
сопротивление
в
цепи
ротора
,
Ом
.
Выражение
(17)
справедливо
при
одинаковом
моменте
на
естественной
и
искусственной
характеристиках
.
Скольжение
электродвигателя
при
работе
на
подъем
0
0
5
,
0
ω
ω
ω
c
рпод
S
−
=
(18)
на
спуск
груза
0
0
5
,
0
ω
ω
ω
c
рсп
S
+
=
(19)
где
ω
с
–
угловая
скорость
электродвигателя
при
работе
на
естественной
характеристике
при
М
=
М
с
.
Для
построения
характеристики
электродвигателя
при
подъеме
груза
необходимо
определить
критическое
скольжение
.
Токи
в
сети
и
роторе
при
работе
ни
искусственных
характеристиках
определяют
так
же
,
как
в
п
. 1.2,
при
соответствующих
значениях
скольжения
S
рпод
,
S
рсп
и
добавочного
сопротивления
R
2
доб
.
Часть
2
2.1.
Для
повторно
-
кратковременного
режима
работы
(S3)
выпускается
серия
специальных
машин
,
рассчитанных
на
этот
режим
.
Такими
машинами
являются
электродвигатели
с
повышенным
скольжением
.
Эти
электродвигатели
Рис
. 3
22
рассчитываются
на
работу
при
следующих
стандартных
продолжительностях
включения
(
ПВ
): 15, 25, 40, 60
и
100 %.
В
технической
характеристике
таких
двигателей
приводят
величины
мощности
двигателя
для
всех
значений
ПВ
.
За
номинальную
,
мощность
принимается
мощность
при
ПВ
=
40 %.
Длительность
рабочего
цикла
не
должна
превышать
10
мин
. (
ГОСТ
183).
Для
выбора
двигателя
из
данной
серии
необходимо
определить
фактическую
продолжительность
включения
ПВ
(
указывается
в
задании
)
и
мощность
сопротивления
Р
с
(
по
выражению
1).
Если
продолжительность
включения
окажется
нестандартной
,
то
при
выборе
электродвигателя
найденное
значение
мощности
сопротивления
следует
пересчитать
на
ближайшее
большее
стандартное
значение
продолжительности
включения
:
,
1
/
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
=
ст
ф
ст
ф
с
с
Р
Р
ε
ε
α
ε
ε
(20)
где
ε
ст
–
стандартное
значение
относительной
продолжительности
включения
(
ε
ст
=
0,15; 0,25; 0,4; 0,6
),
о
.
е
.;
0
t
t
t
p
p
ф
+
=
ε
–
фактическое
значение
относительной
продолжительности
включения
,
о
.
е
.;
Р
с
–
мощность
сопротивления
при
значении
ε
ф
,
кВт
;
Р
'
с
–
мощность
сопротивления
,
приведенная
к
ближайшему
большему
стандартному
значению
ε
ст
,
кВт
;
α
= (
0,5...0,7
) –
коэффициент
потерь
.
По
полученному
значению
Р
'
с
надо
выбрать
двигатель
так
,
чтобы
мощность
двигателя
при
стандартной
продолжительности
включения
удовлетворяла
условию
/
с
Р
Р
ст
≥
ε
(21)
после
чего
двигатель
необходимо
проверить
по
условию
надежного
пуска
(6).
Естественную
,
механическую
характеристику
следует
построить
по
характерным
точкам
(
рис
. 4):
1.
ω
=
ω
0
;
М
= 0;
2.
ω
=
ω
н
;
н
н
н
р
М
М
ω
=
=
;
3.
ω
=
ω
к
=
ω
0
(1–S
к
);
М
=
М
к
= µ
к
М
н
;
(22)
4.
7
0
ω
ω
ω
≈
=
min
;
М
=
М
min
= µ
min
М
н
;
5.
ω
= 0;
М
=
М
п
= µ
п
М
н
,
где
µ
min
–
кратность
минимального
момента
;
µ
п
–
кратность
пускового
момента
;
µ
к
–
кратность
критического
момента
;
ω
min
–
угловая
скорость
при
минимальном
моменте
,
с
-1
.
Построение
искусственных
механических
характеристик
при
изменении
напряжения
сети
основывается
на
квадратичной
зависимости
момента
асинхронного
электродвигателя
от
величины
приложенного
напряжения
.
Для
построения
данных
характеристик
необходимо
произвести
пересчет
моментов
23
для
точек
2, 3, 4
и
5 (
рис
. 4)
с
номинального
напряжения
на
напряжения
,
указанные
в
задании
,
по
выражению
2
.
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
фн
зад
ф
е
и
U
U
М
М
(23)
2.2.
При
повторно
-
кратковре
-
менном
режиме
работы
(S3)
могут
быть
использованы
электродвига
-
тели
,
предназначенные
для
продол
-
жительного
режима
работы
(S1).
Поэтому
выбор
электродвигателя
для
привода
подъемного
механизма
производится
аналогично
выбору
двигателя
с
фазным
ротором
(
п
.
1.1).
Выбранные
электродвигатели
необходимо
проверить
по
условию
надежного
пуска
(6).
2.3.
Время
пуска
tnyc
к
привода
определяют
на
основе
уравнения
движения
электропривода
:
,
.
dt
d
J
М
М
пр
пр
с
дв
ω
=
(24)
где
М
дв
–
момент
электродвигателя
,
Н
·
м
;
М
с
.
пр
–
момент
сопротивления
подъемного
механизма
,
приведенный
к
валу
электродвигателя
,
Н
·
м
;
J
п
p
–
приведенный
момент
инерции
системы
«
двигатель
–
подъемный
механизм
»,
кг
·
м
2
.
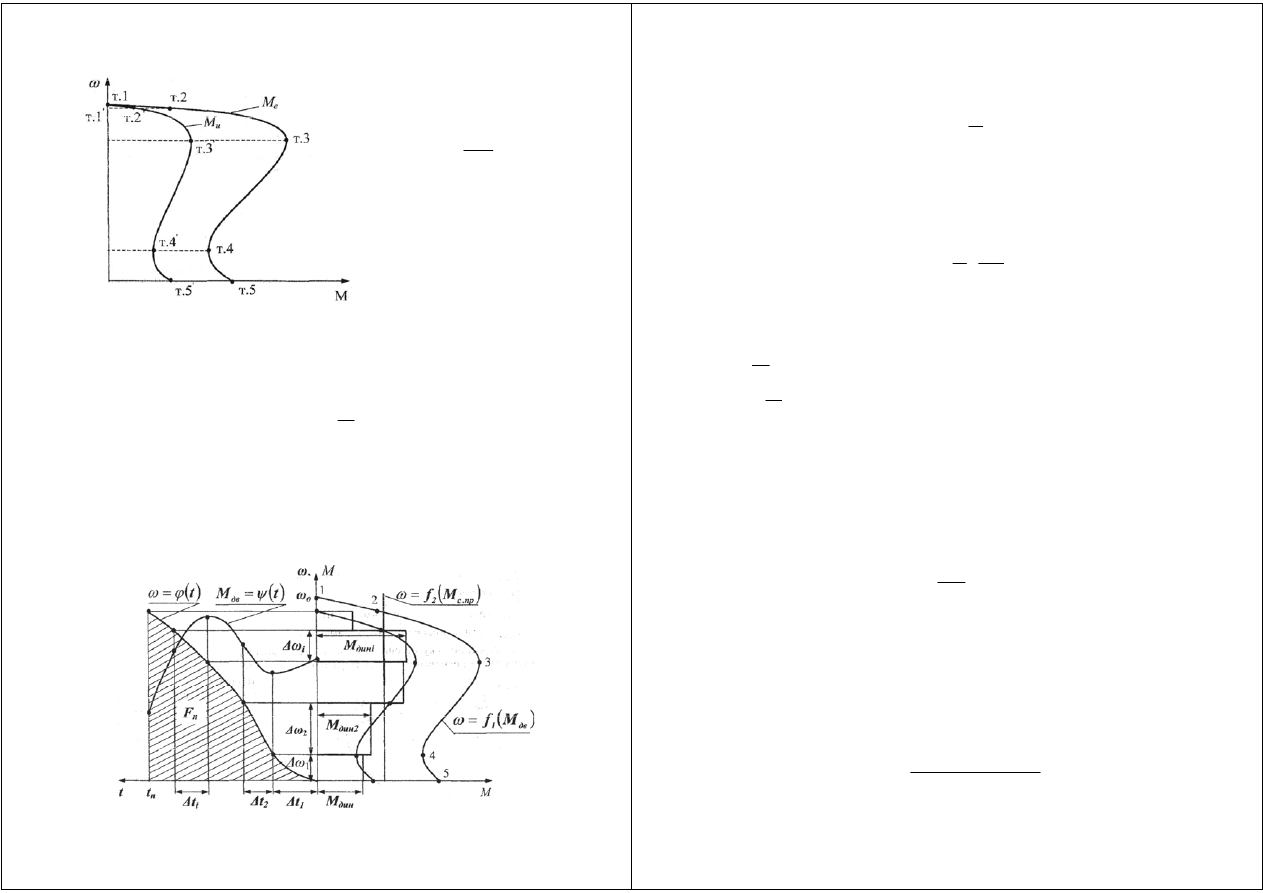
Механическую
характеристику
двигателя
ω
=
f
1
(
М
дв
)
достаточно
построить
по
характерным
точкам
(
рис
. 5)
так
же
,
как
в
п
. 2.1.
Рис
. 5
Рис
. 4
24
Приведенный
к
валу
электродвигателя
момент
сопротивления
подъемного
механизма
определяют
по
выражению
н
с
пр
с
Р
М
ω
=
.
,
(25)
который
будет
постоянным
.
Механическую
характеристику
подъемного
механизма
ω
=
f
2
(
М
с
.
пр
)
необходимо
построить
на
том
же
графике
,
что
и
механическую
характеристику
электродвигателя
ω
=
f
1
(
М
дв
) (
рис
. 5).
Приведенный
к
валу
электродвигателя
момент
инерции
J
п
p
системы
«
двигатель
–
подъемный
механизм
»
определяют
по
выражению
2
2
2
н
б
дв
пр
mV
i
J
к
J
J
ω
+
+
=
(26)
где
к
–
коэффициент
,
учитывающий
момент
инерции
механической
передачи
(
к
=
1,2);
J
б
–
момент
инерции
барабана
подъемного
механизма
кг
·
м
2
;
J
дв
–
момент
инерции
ротора
электродвигателя
,
кг
·
м
2
;
сн
н
i
ω
ω
=
–
передаточное
отношение
редуктора
;
d
V
сп
2
=
ω
–
номинальная
скорость
барабана
подъемного
механизма
,
с
-1
;
V –
скорость
подъема
груза
,
м
/
с
;
d –
диаметр
барабана
,
м
;
т
–
масса
груза
,
кг
,
Используя
построенные
механические
характеристики
электродвигателя
ω
=
f
1
(
М
дв
)
и
подъемного
механизма
ω
=
f
2
(
М
с
.
пр
)
,
строят
кривую
динамического
момента
на
основе
соотношения
М
дв
–
М
с
.
пр
=
М
дин
.
Затем
кривую
динамического
момента
заменяют
ступенчатой
линией
с
участками
по
скорости
∆ω
i
,
на
которых
динамический
момент
постоянен
и
равен
его
средней
величине
М
дин
i
(
рис
. 5).
Тогда
время
пуска
на
каждом
участке
:
i
дин
i
пр
i
M
J
t
ω
∆
=
∆
(27)
где
∆ω
=
ω
i+1
–
ω
i
–
интервал
скорости
на
i
–
м
участке
,
с
-1
.
Полное
время
пуска
∑
=
∆
=
N
i
i
n
t
t
1
(28)
где
N
–
количество
участков
.
Результаты
расчета
необходимо
свести
в
таблицу
.
Зависимость
М
дв
=
ψ
(
t
)
строится
на
основе
графиков
ω
=
φ
(
t
)
и
ω
=
f
1
(
М
дв
).
2.4.
Допустимое
число
включений
в
час
для
электродвигателя
подъемного
механизма
,
выбранного
в
п
. 2.2,
рассчитывается
по
формуле
(
) (
)
n
ф
н
ф
н
доп
A
P
P
P
h
∆
∆
−
∆
+
−
∆
=
ε
β
1
3600
(29)
где
∆
Р
н
–
номинальные
потери
мощности
,
Вт
;
∆
Р
ф
–
фактические
потери
мощности
(
при
нагрузке
Р
с
),
Вт
;

25
β
–
коэффициент
ухудшения
охлаждения
;
∆
А
п
–
потери
энергии
в
двигателе
при
пуске
,
Дж
.
Номинальные
потери
мощности
н
н
н
н
Р
Р
η
η
−
=
∆
1
(30)
где
η
н
–
номинальный
КПД
электродвигателя
.
Фактические
потери
мощности
при
нагрузке
Р
с
,
2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∆
+
∆
=
∆
н
c
V
с
ф
Р
P
Р
Р
Р
(31)
где
∆
Р
с
–
постоянные
потери
мощности
в
электродвигателе
,
Вт
;
∆
Р
V
–
переменные
потери
мощности
в
электродвигателе
,
Вт
.
Постоянные
и
переменные
потери
могут
быть
найдены
путем
решения
системы
уравнений
:
⎪⎩
⎪
⎨
⎧
=
∆
∆
∆
+
∆
=
∆
,
;
α
V
c
V
с
н
P
P
Р
Р
Р
(32)
где
α
= 0,5...0,7 –
коэффициент
потерь
.
Потери
энергии
при
пуске
.
2
1
0
0
2
0
/
2
1
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
∆
∫
n
t
n
c
пр
n
dt
t
M
J
R
R
A
ω
ω
ω
(33)
Интеграл
∫
n
t
dt
0
ω
можно
приближенно
вычислить
графически
,
имея
зависимость
ω
=
φ
(
t
) (
рис
. 5),
который
равен
заштрихованной
площади
,
то
есть
∫
=
n
t
n
dt
F
0
ω
(34)
Тогда
потери
энергии
при
пуске
(
)
.
2
1
0
2
0
/
2
1
⎥
⎦
⎤
⎢
⎣
⎡
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
∆
n
n
c
пр
n
F
t
M
J
R
R
A
ω
ω
(35)
Часть
3
3.1.
Для
полного
использования
электродвигателя
по
нагреву
при
работе
в
кратковременном
режиме
его
следует
перегружать
,
то
есть
выбирать
,
исходя
из
условия
с
н
Р
Р
〈
(36)
Для
количественной
оценки
перегрузки
используются
коэффициенты
термической
р
Т
и
механической
р
м
перегрузок
:
;
T
t
exp
1
1
р
н
p
Т
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
−
=
(37)
(
)
,
1
α
α
−
+
=
T
м
p
p
(38)
где
t
p
–
время
работы
,
мин
;
Т
н
–
постоянная
времени
нагрева
,
мин
;
26
α
= (0,54…0,7) –
коэффициент
потерь
.
Постоянная
времени
нагрева
определяется
по
выражению
:
,
2
А
С
Т
н
=
(39)
где
С
=
с
0
m
дв
–
теплоемкость
двигателя
,
Дж
/º
С
;
с
0
–
удельная
теплоемкость
стали
,
Дж
/
кг
·º
С
;
т
дв
–
масса
электродвигателя
,
кг
;
доп
н
Р
А
τ
∆
=
–
теплоотдача
двигателя
,
Дж
/
с
·º
С
;
∆
Р
н
–
номинальные
потери
мощности
в
двигателе
,
Вт
;
τ
доп
–
допустимое
значение
превышения
температуры
,
соответствующее
классу
нагревостойкости
изоляции
(
для
класса
изоляции
В
:
τ
доп
= 85 °
С
;
для
класса
изоляции
F:
τ
доп
= 110 °
С
;
для
класса
изоляции
Н
:
τ
доп
= 135 °
С
).
Полное
использование
электродвигателей
по
нагреву
ограничивается
допустимой
перегрузочной
способностью
,
которая
для
асинхронных
двигателей
характеризуется
кратностью
критического
момента
µ
к
.
Поэтому
при
µ
к
<
р
м
двигатель
по
нагреву
будет
недоиспользован
и
определяющим
является
кратность
критического
момента
.
По
известным
для
выбранного
двигателя
номинальной
мощности
Р
н
и
коэффициенту
механической
перегрузки
р
м
определяют
мощность
Р
к
,
которую
может
развивать
данный
двигатель
,
не
перегреваясь
,
в
течение
времени
t
p
при
кратковременном
режиме
работы
:
н
м
к
Р
р
Р
=
.
(40)
При
этом
должно
выполняться
условие
с
к
Р
Р
≥
.
(41)
Кроме
проверки
по
условию
нагрева
,
двигатель
проверяется
по
условию
надежного
пуска
(6).
3.2.
Превышение
температуры
двигателя
в
конце
цикла
работы
может
быть
определено
из
уравнения
кривой
нагрева
:
⎥
⎦
⎤
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
=
н
p
ф
уст
t
Т
t
ехр
p
1
.
τ
τ
(42)
где
н
ф
доп
ф
уст
Р
Р
∆
∆
=
τ
τ
.
–
установившееся
значение
превышения
температуры
электродвигателя
при
нагрузке
Р
с
, º
С
;
∆
Р
ф
–
потери
мощности
при
нагрузке
Р
с
,
кВт
;
∆
Р
н
–
номинальные
потери
мощности
,
кВт
.
Часть
4
4.1.
Для
определения
параметров
двигателя
(
R
1
,
R
'
3
,
X
1
,
X
'
2
,
I
'
н
)
достаточно
воспользоваться
упрощенной
Г
-
образной
схемой
замещения
.
Активное
сопротивление
статора
R
1
может
быть
определено
из
выражения
для
переменных
потерь
мощности
в
двигателе
:
(
)
н
н
н
V
M
R
I
P
ω
ω
−
+
=
∆
0
1
2
1
3
(43)
Переменные
потери
мощности
∆
P
V
определяются
путем
решения
системы

27
уравнений
(32).
Сумму
реактивных
сопротивлений
статора
и
ротора
(
Х
к
=
Х
1
+
Х
'
2
)
можно
определить
из
выражения
для
критического
момента
двигателя
:
(
)
,
2
3
2
2
1
1
0
2
к
фн
к
X
R
R
U
М
+
+
=
ω
(44)
где
U
фн
–
номинальное
фазное
напряжение
сети
,
В
.
Активное
сопротивление
ротора
R
'
2
двигателя
может
быть
определено
следующим
образом
.
Потери
мощности
в
роторе
в
номинальном
режиме
с
одной
стороны
определяются
так
:
(
)
,
0
2
н
н
н
М
Р
ω
ω
−
=
∆
(45)
с
другой
стороны
,
( )
.
3
/
2
2
/
2
2
R
I
Р
н
н
=
∆
(46)
Тогда
номинальный
ток
ротора
(
)
/
2
0
/
2
3
R
M
I
н
н
н
ω
ω
−
=
(47)
Номинальный
ток
ротора
можно
определить
также
из
упрощенной
Г
-
образной
схемы
замещения
:
2
/
2
1
/
2
к
н
фн
н
X
S
R
R
U
I
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
(48)
Приравняв
правые
части
выражений
(47)
и
(48),
получим
:
(
)
2
/
2
1
2
/
2
0
3
к
н
фн
н
н
Х
S
R
R
U
R
М
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
−
ω
ω
(49)
Сопротивление
R
'
2
определяется
из
выражения
(49)
после
необходимых
преобразований
.
4.2.
С
целью
построения
механических
характеристик
при
частотном
регулировании
для
каждого
значения
частоты
достаточно
определить
синхронную
угловую
скорость
ω
0f
,
критическое
скольжение
S
к
f
и
соответствующую
ему
скорость
ω
к
f
,
критический
момент
М
к
f
,
используя
следующие
выражения
:
;
50
0
0
f
f
ω
ω
=
(50)
;
50
2
1
/
2
⎟
⎠
⎞
⎜
⎝
⎛
+
=
f
X
R
R
S
к
к
f
(51)
(
)
;
1
0
к
f
f
к
f
S
−
=
ω
ω
(52)
.
50
2
50
3
2
2
1
1
0
2
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
+
+
⎟
⎠
⎞
⎜
⎝
⎛
=
f
X
R
R
f
U
M
к
f
фн
к
f
ω
(53)
28
П р и л о ж е н и е
1
Задания
к
курсовой
работе
№
ва
-
рианта
Тип
схемы
m
,
кг
V
,
м
/
с
d
,
м
J
б
,
кг
·
м
2
η
n
ПВ
, %
1 2 3 4 5 6 7 8
01
1900 1,1 0,4 15 0,9 29
02
2000 1,1 0,4 20 0,85 44
03 2100
1,1
0,55
22
0,9
48
04
2200 1,1 0,55 24 0,85 52
05
В
функции
времени
2300 1,0 0,5 21 0,9 56
06
2400 1,0 0,5 23 0,85 34
07
2500 1,0 0,5 20 0,9 36
08
2600 0,9 0,45 20 0,85 20
09 2700
0,9
0,55
18
0,9
10
10
В
функции
тока
2800 0,8 0,5 18 0,85 30
11
2900 0,7 0,4 16 0,9 50
12
3000 0,6 0,45 17 0,85 35
13 3100
0,6
0,55
22
0,9
35
14
3200 0,6 0,5 20 0,85 55
15
В
функции
скорости
3300 0,6 0,55 22 0,9 13
16
3400 0,5 0,55 20 0,85 19
17
3500 0,5 0,6 22 0,9 29
18
3600 0,5 0,6 22 0,85 35
19
3700 0,4 0,6 24 0,9 12
20
В
функции
времени
3800 0,4 0,6 24 0,85 20
21
500 1,5 0,4 17 0,9 12
22
700 1,5 0,5 20 0,8 20
23
900 1,5 0,4 17 0,85 30
24 1000
1,2
0,35
10
0,9
12
25
В
функции
скорости
800 1,2 0,4 17 0,8 20
26
1200 1,2 0,35 10 0,85 30
27
1500 1,0 0,35 8 0,8 12
28
1700 1,0 0,35 10 0,85 20
29
1900 1,0 0,35 8 0,9 30
30
В
функции
времени
2000 0,8 0,4 10 0,8 12
31 2700
0,8
0,35
8
0,85
20
32 3000
0,8
0,35
10
0,9
30
33
2500 0,6 0,5 20 0,85 12
34 3300
0,6
0,4
8
0,9
20
35
В
функции
тока
3700 0,7 0,5 20 0,85 30

29
1 2 3 4 5 6 7 8
36 3500
0,6
0,45
11
0,9
35
37
3100 0,7 0,5 12 0,8 45
38
1800 0,7 0,4 13 0,85 50
39 3200
0,9
0,35
14
0,9
55
40
В
функции
скорости
2600 0,9 0,45 15 0,85 20
41
2100 0,9 0,5 16 0,8 20
42
2300 1,3 0,55 18 0,85 15
43 1400
1,3
0,45
19
0,9
18
44
1100 1,3 0,5 20 0,85 20
45
В
функции
времени
600 1,4 0,35 6 0,8 35
46 1500
1,4
0,4
7
0,85
28
47
1600 1,4 0,5 10 0,9 37
48 1700
1,1
0,55
8
0,85
46
49 2000
1,1
0,35
15
0,8
50
50
В
функции
тока
850 1,1 0,4 12 0,9 55
51
800 1,6 0,35 6 0,8 12
52 900
1,6
0,4
7
0,85
15
53
1000 1,6 0,45 8 0,9 20
54
1100 0,7 0,5 15 0,85 29
55
В
функции
скорости
1200 0,7 0,55 14 0,8 32
56
1300 0,7 0,35 13 0,85 35
57
1400 0,8 0,4 12 0,9 45
58
1500 0,8 0,45 10 0,85 50
59
850 0,8 0,5 11 0,8 48
60
В
функции
времени
950 0,9 0,55 9 0,85 30
61
1700 0,9 0,4 17 0,9 50
62
1600 0,9 0,45 20 0,85 34
63 1900
1,0
0,35
18
0,8
12
64
1800 1,0 0,5 21 0,85 35
65
В
функции
тока
2000 1,0 0,55 19 0,9 20
66
2700 1,1 0,45 10 0,85 12
67 2500
1,1
0,55
11
0,8
17
68
2000 1,1 0,5 12 0,85 20
69 2100
1,2
0,45
17
0,9
28
70
В
функции
скорости
2300 1,2 0,5 20 0,85 30
71 3000
1,2
0,55
17
0,8
35
72
1400 1,3 0,35 15 0,85 45
73
1500 1,3 0,4 13 0,9 49
74 1600
1,3
0,45
8
0,85
53
75
В
функции
времени
800 1,4 0,35 8 0,8 50
30
1 2 3 4 5 6 7 8
76
900 1,4 0,45 10 0,85 14
77
1000 1,4 0,4 12 0,9 17
78
1100 1,5 0,35 14 0,85 20
79 1200
1,5
0,45
16
0,8
28
80
В
функции
тока
1300 1,5 0,5 18 0,85 33
81
1400 1,5 0,4 12 0,9 35
82
1500 1,4 0,35 15 0,85 45
83
1600 1,4 0,4 20 0,8 50
84
1700 1,4 0,45 22 0,85 20
85
В
функции
скорости
1800 1,3 0,3 15 0,9 10
86
1900 1,3 0,35 14 0,85 32
87
2000 1,2 0,4 19 0,8 48
88
2200 1,2 0,45 24 0,85 22
89
2400 1,1 0,4 13 0,9 18
90
В
функции
времени
2600 1,1 0,35 21 0,85 45
91
2800 1,0 0,5 18 0,8 55
92
3000 1,0 0,55 20 0,85 50
93 600
1,6
0,3
6
0,9
20
94 700
1,6
0,35
7
0,85
30
95
В
функции
тока
800 1,6 0,4 8 0,8 35
96 900
1,5
0,4
9
0,85
12
97
2000 1,2 0,5 15 0,9 18
98
1500 1,3 0,45 12 0,85 50
99
1700 1,2 0,4 14 0,8 20
100
В
функции
скорости
2300 1,1 0,5 17 0,85 12
101
1500 1,3 0,4 15 0,9 11
102
1700 1,2 0,45 10 0,85 37
103 2500
1,1
0,35
20
0,8
28
104
2900 0,9 0,4 22 0,85 55
105
В
функции
времени
750 1,5 0,35 10 0,9 45
106
850 1,5 0,3 12 0,85 35
107 1400
1,0
0,35
16
0,8
20
108
3000 0,8 0,55 24 0,85 10
109 700
1,3
0,45
18
0,9
13
110
В
функции
тока
800 1,5 0,4 16 0,85 18
111 900
1,4
0,35
14
0,8
30
112
1000 1,3 0,4 12 0,85 20
113 1100
1,4
0,45
18
0,9
28
114
1200 1,4 0,5 20 0,85 32
115
В
функции
скорости
1300 1,3 0,55 22 0,8 38
116
1400 1,5 0,5 25 0,85 45
117
В
функции
времени
1500 1,5 0,55 19 0,9 50