Добавлен: 22.11.2023
Просмотров: 189
Скачиваний: 7
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
управления. Существует несколько типов коммуникационных сред, проводные, радиосистемы, волоконно-оптические и др.
Топология сети – это компоновка, структура, физическое расположение всех узлов сети (рабочих станций, серверов, коммуникационного
оборудования) и способ соединения их линий связи. Среди топологий
следует различать физическую и логическую. Физическая топология коммуникационной сети отображает схему соединения сетевых элементов.
Логическая топология показывает, как по ней передается информация.
В коммуникационных сетях широкое распространение получили
следующие физические топологии:
- шина (bus);
- звезда (star);
- кольцо (ring);
- полносвязная топология (mesh topology).
Сравнительный анализ этих топологий приведен в табл.1.
В крупных сетях можно встретить совокупность нескольких физических топологий. Рассмотрим некоторые из них, например, каскадная топология «звезда» приведенная на рис. 2
Каскадная сеть обычно представляет собой совокупность коммутаторов (концентраторов), подключенных последовательно посредством одного или нескольких соединений между двумя соседними. По мере добавления в такую сеть новых устройств падает ее производительность, растет риск запаздывания пакетов данных и ее перегрузки.
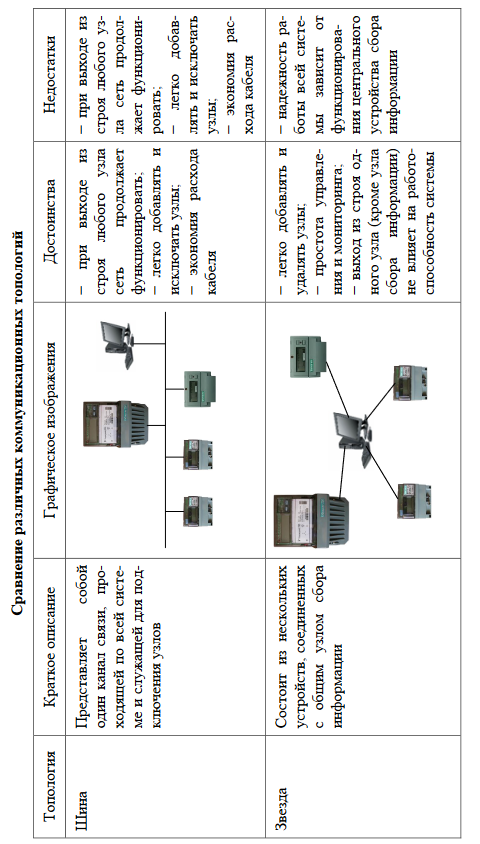
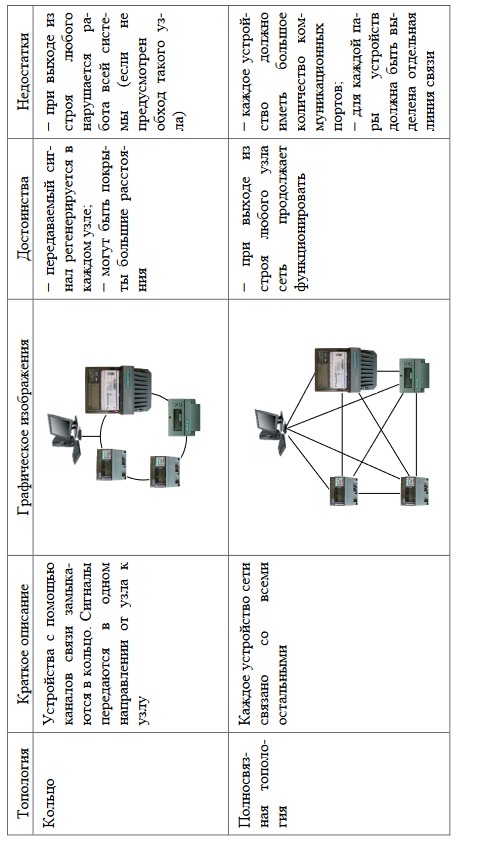
Таблица 1 – Сравнение различных коммуникационных топологий.
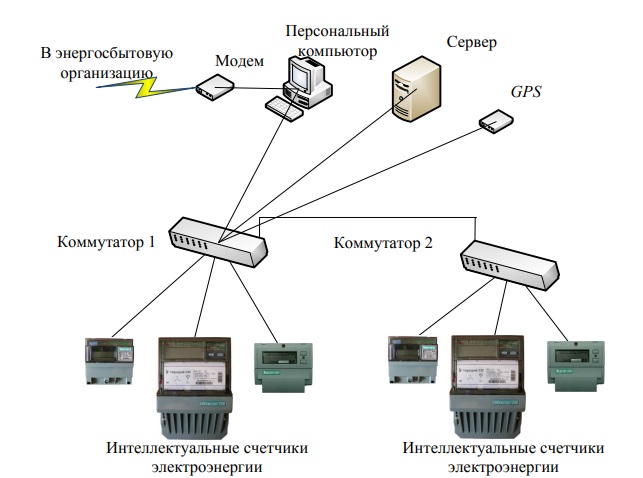
Рисунок 2 – Структурная схема сети построенной на основе каскадной топологии «звезда»
Логическая топология сети определяет, как узлы общаются через
среду, т. е. как обеспечивается управление доступом к среде. Наиболее известные логические топологии:
«точка-точка» (point-to-point);
множественного доступа (multi access);
широковещательная (broadcast);
маркерная (token passing).
Логическая топология «точка-точка» обеспечивает передачу данных от одного узла до другого независимо от промежуточных устройств между ними.
Топология множественного доступа характерна для Ethernet-сетей, реализованных на многопортовых повторителях (hub). Доступ к разделяемой бщей шине имеют все узлы, но в каждый момент времени передавать данные может только один узел. При этом остальные узлы могут только «слушать» среду.
Использование широковещательной топологии определяет, что каждый узел посылает свои данные всем остальным узлам сетевой среды. При этом неизвестно, какие станции функционируют.
Маркерная логическая топология, как и топология множественного доступа, реализует разделение общей среды. Однако, если в топологии множественного доступа Ethernet-сетей доступ к среде случайный (недетерминированный), то в маркерной топологии доступ к среде детерминированный. Электронный маркер (token) последовательно передается каждому узлу обычно по кольцу. Узел, получивший маркер, может передавать
данные в сеть. Если в узле нет данных для передачи, то он передает маркер следующему узлу, и процесс повторяется.
Физическая и логическая топологии сети могут совпадать или отличаться. Например, сетевая технология Ethernet может иметь концентраторы (hub) и кабель «витая пара». Таким образом, физически реализуется топология «звезда», так как все узлы подключены к центральному устройству – концентратору (hub). Логическая топология – «шина», поскольку внутри концентратора все узлы подсоединены к общей магистрали.
Физически реализуемые коммуникационные протоколы
Коммуникационные протоколы представляют собой свод правил, с помощью которых обеспечивается передача информации внутри сети. Они функционально реализуют возможности управления сетью, устанавливают правила представления информации, коммуникационных сигналов, а также принципы обнаружения ошибок и аутентификации (установление подлинности) устройств в сети. Обязанность производителей цифровых устройств автоматизации и управления электроснабжением − строго соблюдать требования коммуникационных протоколов. Ассоциацией производителей электроники были введены протоколы RS 232, RS 422, RS 423, RS 485 и CAN.
Протокол RS 232
RS-232 (recommended standard – рекомендованный стандарт, 232 – номер стандарта) – название стандарта, описывающего протокол для соединения компьютера и устройства передачи данных.
Протокол RS-232 обеспечивает соединение двух устройств. Первое
называется DTE (Data Terminal Equipment) – ООД (оконченное оборудование данных). ООД – это оборудование, преобразующее пользовательскую информацию в данные для передачи по линии связи и осуществляющее обратное преобразование. Второе называется DCE (Data Communication Equipment) – ОПД (оборудование передачи данных). ОПД – это устройства, обеспечивающие организацию и разрыв соединений, а также управления ими для передачи данных. Как правило, DTE – это компьютер, а DCE – это модем, хотя RS-232 используется для подключения к компьютеру периферийных устройств (мышь, принтер), и для соединения с другим компьютером или контроллером.
Для соединения многих устройств достаточно минимального набора цепей интерфейса RS-232: RD (принимаемые данные), TD (передаваемые данные) и Signal Ground (общий). На рис.3 показана схема кабеля для соединения ПЭВМ и контроллера на соединителях DB9. Остальные цепи интерфейса в данном подключении не используются.
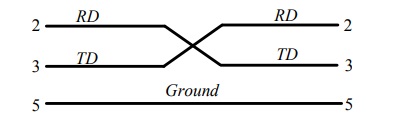
Рисунок 3 – Схема кабеля для соединения ПЭВМ и контроллера на соединителях DB9
Стандарт определяет максимальную длину кабеля в 15 м при скорости 9600 бит/с. При понижении указанной скорости вдвое предельная длина вдвое возрастает. Рекомендуется использовать кабели на основе витой пары, где каждый из сигнальных проводов свит с общим проводом.
Все сигналы в интерфейсе потенциальные с номинальными уровнями +12 В и -12 В относительно общего провода (Signal Ground). Логической единице соответствует уровень -12 В, логическому нулю соответствует +12 В.
RS-232 называют последовательным интерфейсом, потому что поток данных передается по одному проводу бит за битом. В отсутствие передачи данных линия находится в состоянии логической единицы. Скорость передачи данных стандартом не нормируется. В основном используется асинхронный режим работы, при котором данные передаются фреймами (кадрами). Каждый фрейм состоит из стартового бита, битов данных, бита контроля четности (может отсутствовать), стопового бита. Передача битов байта данных осуществляются с младшего бита. Стартовый бит всегда идет уровнем логического нуля, стоповый – единицей. Состояние бита паритета определяется настройкой передатчика.
Передача информации с помощью протокола RS-232 может осуществляться в трех режимах:
- симплексным (одно устройство выступает передатчиком, а другое – приемником, информация поступает однонаправленно от передатчика);
- полудуплексным (любое из устройств может выступать и передатчиком и приемником, но не в одно и тоже время);
- полным дуплексным (любое из устройств может одновременно и передавать, и принимать данные).
Протокол RS-485
RS-485 – название популярного протокола, используемого в промышленных АСУ ТП для соединения контроллеров и другого оборудования. Принцип работы протокола в целом схож с RS-232. Главное его отличие – возможность объединения нескольких устройств.
Протокол RS-485 использует для передачи информации одну двухпроводную линию связи. Режим передачи – полудуплексный. Скорость передачи данных доходит до 10 Мбит/с. Максимальная дальность зависит от скорости: при 10 Мбит/с максимальная длина линии – 120 м, при 100 кбит/с – 1200 м. Количество устройств, подключаемых к одной линии интерфейса, зависит от типа примененных в устройстве приемопередатчиков. Один передатчик рассчитан на управление 32 приемниками.
Для передачи байтов данных используются те же фреймы, что и в RS-232. Протоколы обмена работают по принципу «ведущий»-«ведомый». Одно устройство на магистрали является ведущим (master) и инициирует обмен посылкой запросов подчиненным устройствам (slave), которые различаются логическими адресами.
В качестве среды используют кабель на основе витой пары. В условиях повышенных внешних помех применяют кабели с экранированной витой парой, при этом экран кабеля соединяют с защитной «землей» устройства. Сеть должна быть проложена по топологии «шина без ответвлений».
Интерфейс RS-485 использует балансную (дифференциальную) схему передачи сигнала. Это означает, что уровни напряжений на сигнальных цепях А и В меняются в противофазе (рис.4).
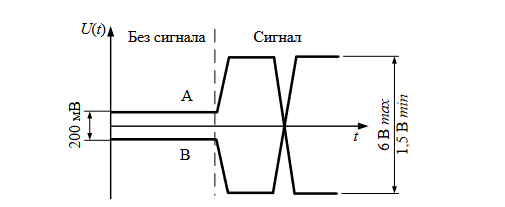
Рисунок 4 – Уровни напряжения в сигнальных цепях интерфейса RS – 485.
Передатчик должен обеспечивать уровень сигнала 1,5 В при максимальной нагрузке (32 стандартных входа и 2 терминальных резистора) и не более 6 В на холостом ходу. Уровни напряжений измеряют дифференциально - один сигнальный провод относительно другого. На стороне приемника RS-485 минимальный уровень принимаемого сигнала должен быть не менее 200 мВ.
Протокол RS-485 способен работать в двух режимах: персонифицированном (Unicast) и широковещательном (Broadcast).
В режиме Unicast (рис. 5) Master посылает команду запроса только одному Slave устройству. Master будет ожидать до тех пор, пока не получит ответа или прекратит ожидание после истечения определенного интервала времени. Такой режим может быть использован для опроса счетчиков электроэнергии или при конфигурировании одного счетчика.
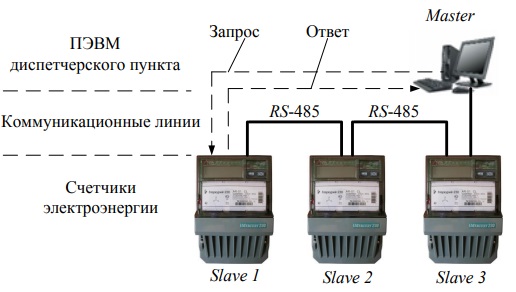
Рисунок 5 – Реализация протокола RS 485 в режиме Unicast.
В режиме Broadcast (рис. 6) запрос посылается всем Slave устройствам, при этом не ожидается ответа от них. Это может быть команда, отправленная всем счетчикам, например, для синхронизации внутреннего
времени приборов учета.
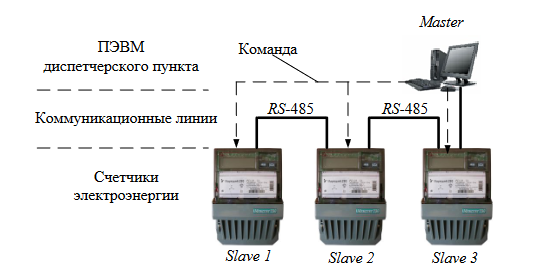
Рисунок 6 – Реализация протокола RS 485 в режиме Broadcast.
Протокол CAN
CAN (Controller Area Network) - это промышленный стандарт, позволяющий осуществить объединение в единую сеть различных узлов, механизмов, датчиков и т. п. Протокол является широковещательным, это значит, что все устройства в CAN-сети принимают все передаваемые по шине сигналы.
Режим передачи данных - последовательный, при этом байты сообщений формируют кадры определенного вида. Структуру этих кадров данных мы также обязательно разберем в этой статье.
Основные характеристики протокола CAN:
-
очень высокая надежность и защищенность -
каждое сообщение имеет свой собственный приоритет -
реализован механизм обнаружения ошибок -
автоматическая повторная отправка сообщений, которые были доставлены с ошибкой -
уже упомянутый широковещательный характер передачи данных -
возможность присутствия нескольких ведущих (master) устройств в одной сети -
широкий диапазон скоростей работы -
высокая устойчивость интерфейса к помехам -
кроме того, есть механизм обнаружения "сбойных" узлов с последующим удалением таких узлов из сети.
Для осуществления связи по CAN протоколу применяются те же самые коммуникации, разъемы и режимы, что и у RS-485.
В отличие от RS-485, CAN оперирует со стандартизированным форматом телеграммы, который, кроме 0-8 байтовых данных, также содержит контрольную информацию для адресации и целостности данных (проверка CRC). Пользователь только определяет идентификатор сообщения и полезные данные, все остальное добавляется CAN контроллером (это микросхема или внутренний модуль контроллера). Каждое CAN сообщение имеет собственный приоритет, определяемый этим идентификатором. Сообщения с более высоким приоритетом рассматриваются CAN контроллером как более предпочтительные для передачи и передаются прежде, чем сообщения с более низким приоритетом.
В протоколе CAN реализован усовершенствованный механизм управления обработкой ошибок. Если сообщение было получено узлом неправильно, телеграмма «разрушается» получателем с помощью кадра ошибок и помечается как «недействительное» для всех узлов. Это действие инициирует автоматическую реакцию в CAN контроллере – повторить процесс передачи. Процедура гарантирует получение всеми узлами только «действительных» сообщений. Узлы, повторно передающие некорректные данные, автоматически отключаются от взаимодействия в CAN шине.
Все эти совместно выполняемы меры (короткие сообщения, дифференциальная передача, обнаружение ошибок и их устранение, отключение неисправных узлов) делают CAN отказоустойчивой, защищенной и надежной сетью.