ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 19
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Харчевников Вячеслав Евгеньевич, студент
ГТУ МАДИ, gagagagaga50@mail.ru
Жанна Анатольевна Старостина, канд.тех.наук, доц.(Руководитель)
ГТУ МАДИ, anstar13@yandex.ru
Автоматизация погрузчика
Аннотация
Данная статья посвящена вопросу автоматизации работ трактора. Описываются преимущества использования автоматизированных тракторов, таких как повышение эффективности и безопасности работ, снижение затрат на трудовые ресурсы, минимизация ошибок и повышение точности работы. Рассматриваются различные виды автоматизированных тракторов, их особенности и принципы работы. Также описывается процесс внедрения автоматизированных тракторов в сельскохозяйственные работы. Статья будет полезна руководителям сельскохозяйственных предприятий, занимающимся логистикой и производством, а также специалистам, которые хотят ознакомиться с новыми технологиями в данной области.
Ключевые слова: концепция автоматизации, автоматизированные трактора, автоматизация процессов.
Keywords: automation concept, automatic tractor, process automation.
Abstract
This article is devoted to the issue of automating the work of the tractor. The advantages of using automated tractors are described, such as increasing the efficiency and safety of work, reducing labor costs, minimizing errors and improving work accuracy. Various types of automated tractors, their features and principles of operation are considered. The process of introducing automated tractors into agricultural work is also described. The article will be useful for managers of agricultural enterprises involved in logistics and production, as well as for specialists who want to get acquainted with new technologies in this area.
Системы комплексной автоматизации и беспилотного управления трактором
В настоящее время на рынке сельскохозяйственной техники появляется все больше предложений, направленных на трансформацию самоходных машин, позволяющих работать в режиме автономного и беспилотного управления.
Появление новых перспективных технологий, стимулирующих автоматизацию и цифровизацию рабочих процессов в сельском хозяйстве, обусловлено постоянной потребностью в оптимизации расходов, повышении эффективности и поиске универсальных источников, существенно улучшающих и упрощающих жизнь фермеров и аграриев.
Базовые для российских аграриев знания о беспилотной наземной технике (если не учитывать роботы, роботизированные платформы и БПЛА) сводятся исключительно к инновационным разработкам нового беспилотного зерноуборочного комбайна TORUM от Ростсельмаш и технологии искусственного интеллекта Cognitive Agro Pilot для комбайнов, которые активно продвигались, тестировались и демонстрировались для сельхозтоваропроизводителей в прошлом году.
При этом сегмент сельскохозяйственных тракторов пока не так активно автоматизируется. Отечественным аграриям известны, в основном, примеры обычных модернизаций с помощью применения оборудования для точного земледелия, в частности, систем автоматического параллельного вождения и подруливания, что не предусматривает комплексной автоматизации и по-прежнему требует наличия оператора непосредственно в кабине или рядом с ней.

Системы комплексной автоматизации и беспилотного управления трактором позволяют значительно улучшить эффективность и качество сельскохозяйственных работ. Они включают в себя различные датчики и системы управления, которые позволяют трактору самостоятельно выполнять ряд задач, таких как пахота, вспашка, посев, уборка урожая и т.д.
Такие системы позволяют сократить расходы на топливо, повысить точность и качество работы, а также снизить нагрузку на оператора трактора. Они также могут быть полезны для обеспечения безопасности на полях и улучшения экологической ситуации.
Системы автоматизации и беспилотного управления трактором уже используются в некоторых регионах мира, и их использование ожидается в будущем все более широким кругом сельскохозяйственных предприятий.

Системы комплексной автоматизации и беспилотного управления трактором представляют собой инновационные решения, которые позволяют автоматизировать и оптимизировать процессы сельскохозяйственного производства. Такие системы обеспечивают автоматическое управление трактором, используя данные с датчиков и систем навигации.
Основные преимущества систем комплексной автоматизации и беспилотного управления трактором:
- Увеличение производительности и эффективности работы трактора за счет оптимизации маршрута и точности выполнения задач.
- Снижение затрат на топливо, снижение износа оборудования, уменьшение количества ошибок при выполнении задач.
- Уменьшение нагрузки на оператора, что повышает его безопасность и уменьшает вероятность ошибок.
- Возможность удаленного управления трактором, что позволяет оператору контролировать работу машины из любой точки.
Одним из основных компонентов системы беспилотного управления трактором является система навигации, которая использует GPS-данные для определения местоположения трактора и его движения. Также в состав системы могут входить датчики, которые могут измерять такие параметры, как влажность почвы, температуру, уровень урожайности и другие.
Системы комплексной автоматизации и беспилотного управления трактором уже широко используются в различных сельскохозяйственных предприятиях по всему миру. Они позволяют повысить эффективность работы, снизить затраты и увеличить производительность.
Для реализации беспилотного управления трактором необходимо использовать специализированные платформы и программное обеспечение, которые позволяют управлять трактором с помощью датчиков и систем навигации. Также для разработки программного кода можно использовать языки программирования, такие как C++, Python, Java и другие.

Системы автоматического вождения тракторов
Системы автоматического вождения тракторов предназначены для облегчения работы тракториста, а в перспективе — для создания возможности одному трактористу одновременно управлять несколькими тракторами, а затем для полной замены тракториста автоматом управления движением трактора. Актуальность разработки таких систем обусловлена в первую очередь тем, что при работе на повышенных скоростях тракторист быстро устает, и его способность соблюдать все агротехнические требования ТП снижается.
При создании систем автовождения оказалось целесообразным работу трактора разбить на три этапа: выезд в поле и возвращение с него, движение по рабочей длине гона и повороты в конце гона для заезда на новый гон. Наибольший этап по затратам и объему выполняемой работы
связан с нахождением трактора на гоне, поэтому предложено несколько методов автовождения трактора при его работе: копирование предыдущего прохода; программирование траектории; дистанционное управление; управление по естественным ориентирам; управление по искусственным ориентирам.
Метод копирования может быть использован на большинстве полевых работ: пахоте, севе, культивации, уборке, т. е. тогда, когда агрегат должен проходить каждый раз один и тот же путь по равноотстоящим друг от друга траекториям. Первый гон тракторист прокладывает при ручном управлении трактором, а затем по борозде от плуга или специально организованным маркером движется копир, закрепленный впереди трактора. Этот копир выдает сигналы на изменение траектории движения трактора в соответствии с направлением борозды.
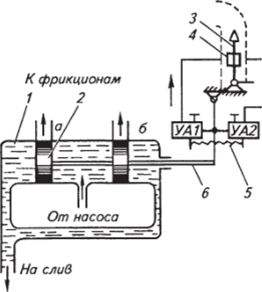
Рис. 5.14. Схема устройства для вождения трактора по копиру:
/ — золотник; 2—поршень; 3— копир; 4— контакты; 5 — пружина; 6— окно
Принцип действия системы автовождения по копиру поясняет рисунок 5.14. Копир 3 при движении трактора скользит по дну борозды. Если копир отклоняется, например, влево, то замыкается левый контакт 4 и срабатывает электромагнит УА1, питающийся от аккумуляторной батареи трактора. При этом рычаг 6 передвигает поршни 2 золотника 1 тоже влево, и открываются его окна а и 6. Масло под давлением, создаваемым гидронасосом, поступает через окно а к левому гидроцилиндру, который отключает левый фрикцион. Вследствие этого трактор начинает поворачиваться влево до размыкания контактов 4, электромагнит УА1 отключается и поршни 2 золотника 1 пружиной 5 возвращаются в исходное положение, при котором левый и правый фрикционы трактора включены. При отклонении копира вправо срабатывает электромагнит УА2 и давление масла через окно 6 действует на органы управления поворотом трактора вправо.
Метод копирования прост по принципу действия, но имеет ряд недостатков: накапливается статическая ошибка управления, вследствие чего после нескольких проходов маршрут движения сильно искривляется, а поэтому возрастают затраты энергии на непрерывные небольшие повороты трактора. Кроме того, копир при наезде на местные препятствия выскакивает из борозды, после чего трактор начинает двигаться произвольно.
При реализации метода программного автовождения траектория движения задается специальным программным устройством. Технически осуществить программное автовождение весьма сложно из-за необходимости высокой точности соблюдения траекторий движения. Например, на гоне длиной 500 м погрешность работы программных устройств на пахоте должна быть не более 0,02% (10 см отклонения) а при квадратно-гнездовой посадке 0,004 % (2 см), что практически недостижимо. Следовательно, программное вождение эффективно только в комбинации с копированием: на длине гона трактором управляют от копирующего устройства, а на поворотах — от программного.
При дистанционном управлении оператор управляет одним или несколькими агрегатами по проводным линиям или по радиосвязи. На практике было применено дублерное вождение машиной, когда тракторист кроме своего трактора управлял соседним по каналу связи. Хотя этот метод сокращает численность трактористов, но усложняет их работу из-за одновременного управления двумя тракторами.
Методы, использующие естественные и искусственные ориентиры (см. рис. 5.15), наиболее удобны при строго заданных маршрутах движения — при выезде тракторов на полевые станы и возврате, вывозке навоза с ферм, доставке кормов, обработке пропашных культур, садов и виноградников. В качестве естественных ориентиров используют рядки растений, края хлебостоя, валки скошенной массы, шпалерную проволоку на виноградниках, магнитное поле Земли и даже планеты и звезды, как при навигационном управлении самолетами и кораблями. Искусственные ориентиры создают специально, прокладывая кабели на обрабатываемых полях, организуя местные радиополя и т. д.
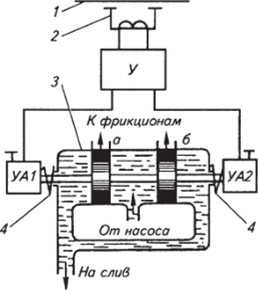
Рис. 5.15. Схема устройства для вождения трактора по проволоке:
Наиболее полно опробован метод вождения по электромагнитному полю, создаваемому проводами. Для этого под почвой прокладывают провода и по ним пропускают высокочастотные токи (десятки килогерц), которые создают вокруг провода электромагнитное поле, воспринимаемое специальными датчиками, установленными на тракторах. Провода закладывают на глубину до 0,7 м вдоль гона на расстоянии двойной ширины захвата рабочей машины. На концах гона и поперек его прокладывают отдельный проводник, через который пропускают ток другой частоты. Создаваемое этим током электромагнитное поле служит сигналом для разворота трактора на угол 180“