Файл: Лабораторная работая 3 по дисциплине "Компьютерные технологии в проектировании" на тему "Исследование следящей системы управления ".docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 19
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
“Тульский государственный университет ”
Институт высокоточных систем им. В.П. Грязева
Кафедра “Электроэнергетика”
Лабораторная работая № 3
по дисциплине “Компьютерные технологии в проектировании”
на тему “Исследование следящей системы управления ”
Выполнил студент гр.121521
Акимов В.В.
Проверил: Базыль И.М.
Тула 2023г
Цель работы: изучить следящую систему управления.
1)
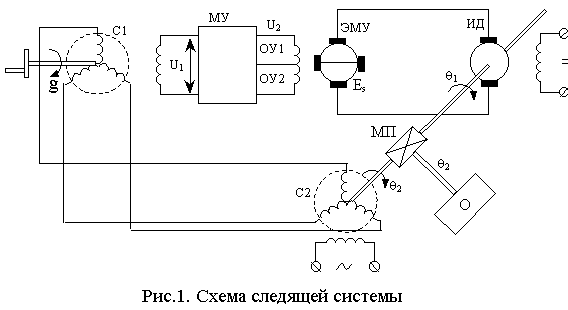
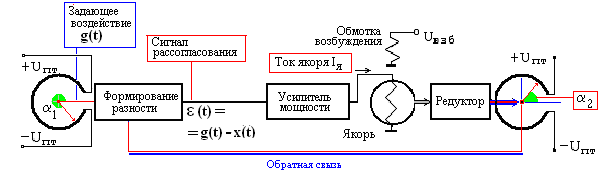
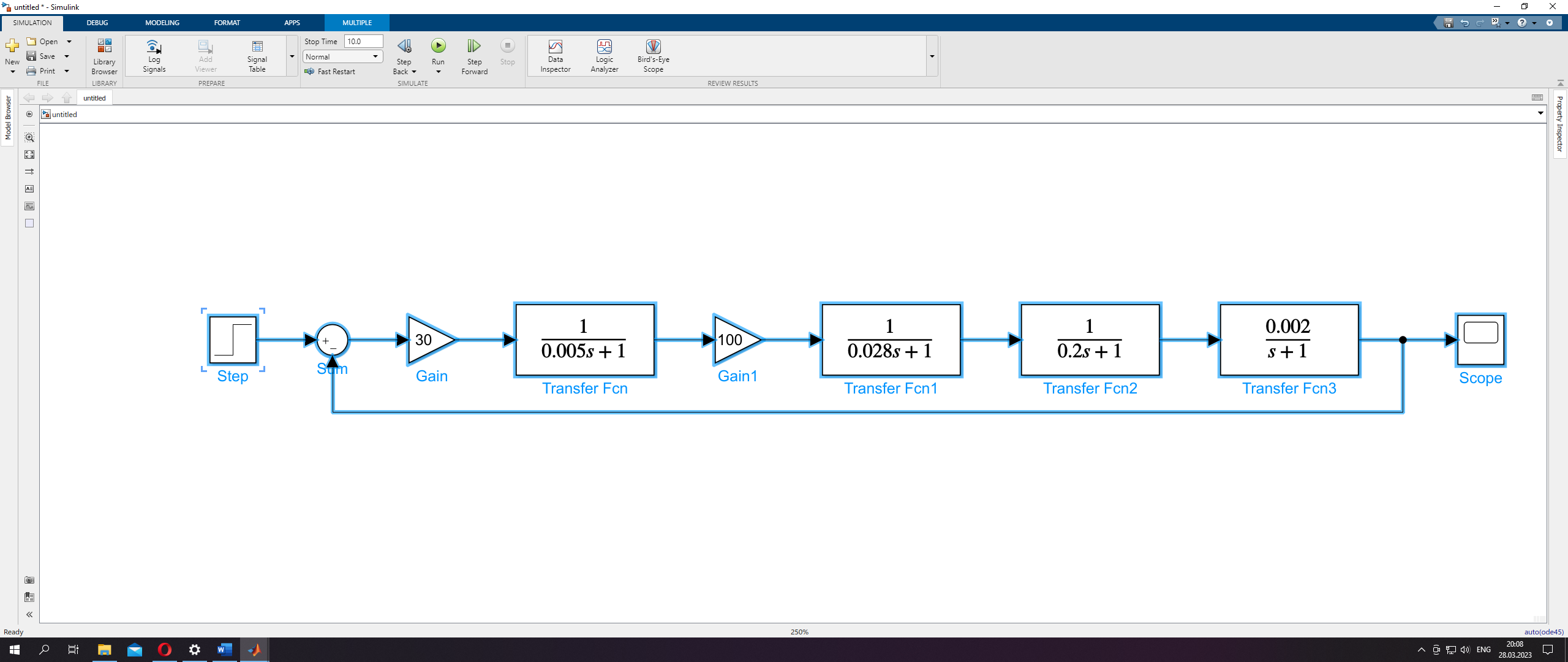
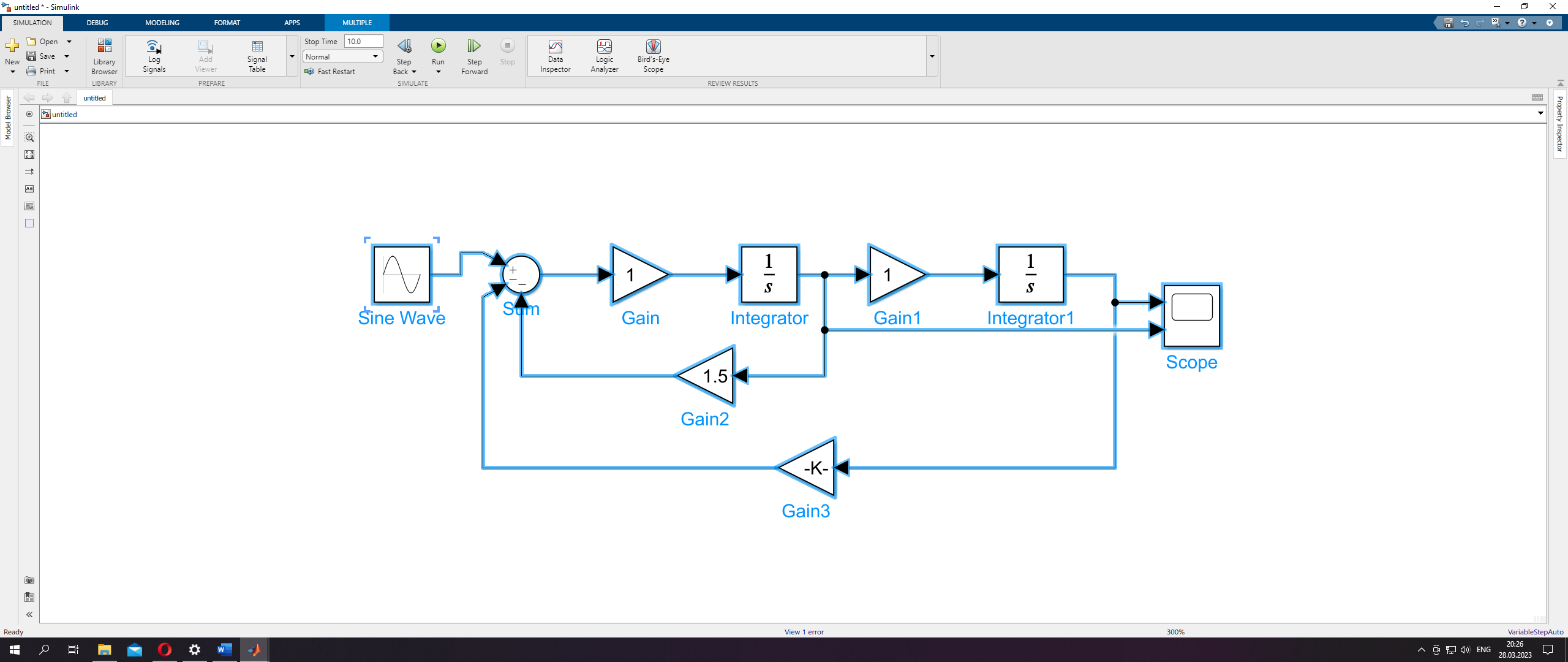
2) Структурная схема следящей системы
3)
4)
5)
6)
7)
Ответы на вопросы:
-
Следящая система - автоматическая система, на выходе которой с определенной точностью копируется произвольное изменение какой-нибудь величины, поданной на вход. В следящей системе выходная величина y(t) воспроизводит изменение входной величины g(t), причем автоматическое устройство реагирует на рассогласование x(t) между выходной и входной величинами. Следящая система имеет обратную связь выхода со входом, которая, по сути дела, служит для измерения результата действия системы. На входе системы производится вычитание x = g - y. Величина рассогласования x и воздействует на промежуточные устройства, а через них - на управляемый объект. Система работает так, чтобы все время сводить к нулю рассогласование x. -
Следящей системой называется такая автоматическая система, которая предназначается для воспроизведения на управляемом объекте (на выходе системы) произвольного закона изменения некоторой величины во времени, задаваемого на входе этой системы. -
Процесс реализации компенсации возмущающего воздействия называется регулированием по возмущению. Регулирование по возмущению обладает достоинствами и недостатками. В числе достоинств следует отметить высокое быстродействие. -
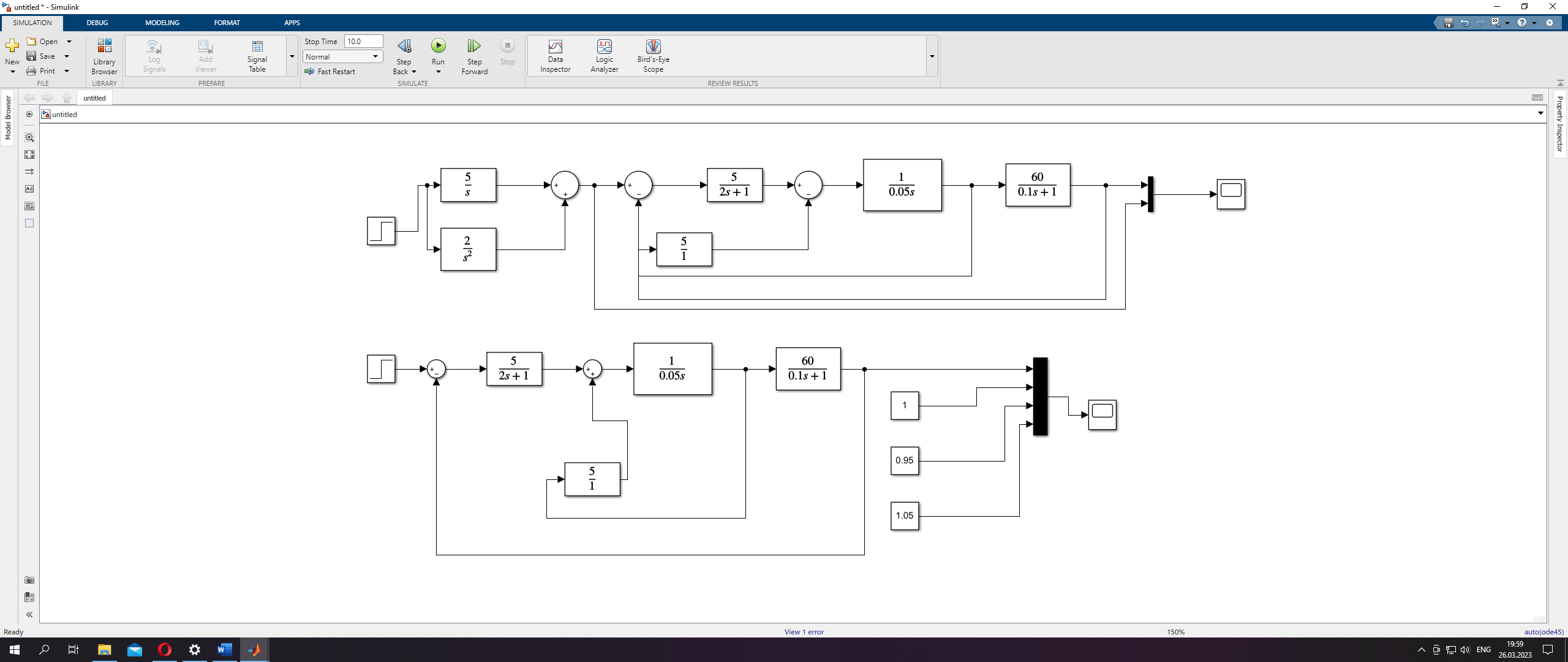
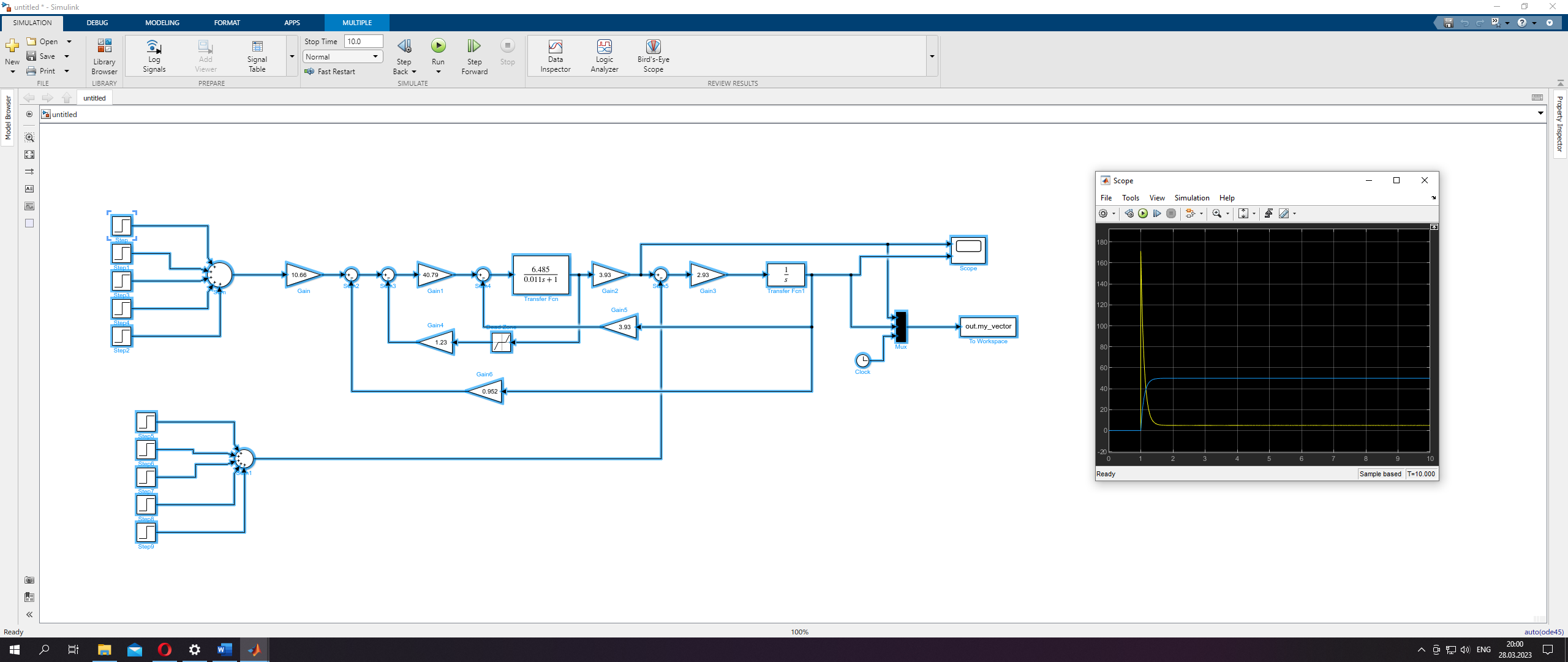
Для реальной системы переходную характеристику можно получить экспериментальным путем; при этом на вход системы следует подавать ступенчатое воздействие и фиксировать реакцию на выходе. Если ступенчатое воздействие отлично от единицы, то характеристику на выходе следует разделить на величину входного воздействия. Зная переходную характеристику, можно определить реакцию системы на произвольное входное воздействие с помощью интеграла свертки. -
Передаточной функцией звена называется отношение изображения выходного сигнала к изображению входного сигнала звена. Иногда для описания передаточных функций звена используется обозначение K (s). -
РАЗОМКНУТАЯ СИСТЕМА УПРАВЛЕНИЯ - система автоматического управления без обратной связи: управляющие воздействия вырабатываются устройством управления обычно по заданной программе. Применяется, напр. , в станках с числовым программным управлением. Управление машиной с помощью руля. Процесс записи информации на гибкий диск, в котором объект "Дисковод" (управляющий объект) изменяет состояние объекта "Дискета" (управляемый объект) . -
Требования, которые предъявляются к САУ в переходных (динамических) режимах, во многом зависят от ее назначения и характера работы, а также условий ее работы, и эти факторы должны учитываться проектировщиком. По категориям требования к надежности САУ можно разделить так: Запас устойчивости; Статическая точность или величина ошибки системы в установившемся режиме работы. -
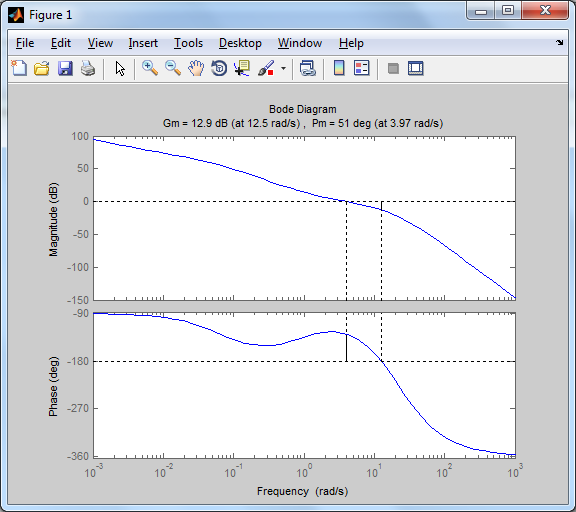
Логарифми́ческая амплиту́дно-фа́зовая часто́тная характери́стика — представление частотного отклика линейной стационарной системы в логарифмическом масштабе.
Логарифми́ческая фазово-частотная характери́стика — зависимость аргумента частотной характеристики от логарифма частоты.
Амплитудно-фазовая частотная характеристика объединяет амплитудную и фазовую частотные характеристики.