Файл: 11. Туелсіз оздырудаы траты тотаы озалтыштарды магнит аынын згерту кезіндегі жасанды электромеханикалы жне механикалы сипаттамалары.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 23.11.2023
Просмотров: 95
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
немесе салыстырмалы бірліктерде ω*= ω*k
мұндағы R* =
кедергі: Rқ*=
Реостаттық сипаттамаларды тұрғызу тәртібі мынандай:
Токтың I* кейбір мәнін алып, табиғи сипаттама арқылы ωс1*- ты табады. Содан кейін белгілі (2.21) тендеуі бойынша R* = R1* , сондай-ақ I1*, бойынша белгісіз ω1* мәнін анықтаймыз. Дәл осы сиякты токтың I* басқа мәндерінен жылдамдықтың белгісіз ω2*, ω3* және т.б. керекті мәндерін анықтаймыз.
2.11-суретте тізбектей қоздырылатын қозғалтқыштың табиғи Rқ* және Rр* реостаттықсипаттамалары, көрсетілген әдіс бойынша тұрғызылған.
2.10-суреттегі келтірілген ω*= ƒ(I*) қисығын және электр механикалық сипаттамаларды пайдаланып қозғалтқыштың механикалық сипаттамаларын
ω*= ƒ(М*) сипаттайтын қисыкгарды оңай тұрғызуға болады.
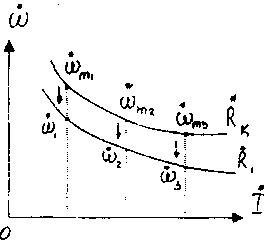
2.11 сурет. Тізбектей қоздырылатын қозғалтқыштың табиғи және реостаттық электр механикалық сипаттамалары
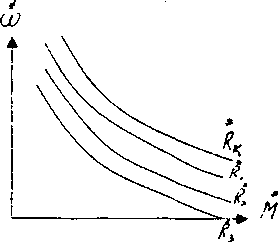
2.12 сурет. Тізбектей қоздырылатын тұрақты ток қозғалтқыштың табиғи және реастаттық механикалық сипаттамалары
19.Тізбектей қоздырудағы тұрақты тоқтағы қозғалтқыштардың зәкірін шунттаған кездегі жасанды электромеханикалық және механикалық сипаттамалары.
Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың зәкірін шунттау тәсілі арқылы бұрыштық жылдамдығын реттеу
(3.46)
(3.47)
(3.48)
Сәйкестендіруші түрлендіруді өткізгеннен кейін табамыз:
(3.49)
деп алайық.
(3.49) теңдеудің сол және оң жағын С=КФ-ке бөлеміз және А мәнін қойғаннан кейін электрмеханикалық сипаттаманың теңдеуін табамыз:
(3.50)
3.33-сурет. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының зәкір орамасын шунттау сұлбасы
Қозғалтқыштың механикалық сипаттамасының теңдеуі
(3.51)
Егер де болса, онда ортақ нүктесі А бар топтас сипаттамалары 3.11 —суретте көрсетілген.
3.34-сурет. Шунттық резистор Rш тұрақты, ал тізбектегі резисторды Rк өзгертіп тұрған кездегі топтас механикалык сипаттамалары
Сипаттамалардың қиылысқан нүктесі А тізбекті резистор арқылы ток өтпейтін жағдайға сәйкес. Бұл зәкірдің бұрыштық жылдамдығы идеал бос жүрістің бұрыштық жылдамдығынан үлкен болған кезде, яғни а > 0 , мүмкін болады.
Ал бұл жағдай зәкірдің ЭҚК-і желінің кернеуін және зәкір тізбегінің ішкі кернеу құлауын толық теңгергенде болады, яғни
(3.52)
Бұл жағдайда қозғалтқыш динамикалық тежелу режимінде сыртқы резистор Rш-қа жұмыс істейді. Якорьдің кернеуі нөлге тең болғандыктан, Iя якорь тоғы
(3.53)
(3.13) тендеуді (3.12) тендеуге қойып және Е мен U-ды оларға пропорционал o және А мәндеріне ауыстырылып А нүктедегі бұрыштық жылдамдықты табамыз.
(3.54)
Егер де Rк = 0 болса, онда зәкір кернеуі Rш тәуелді емес және зәкір тоғы өзгерген кезде тұрақты болып қалады, сол себептен Rк = 0 кезі табиғи сипаттамаға сәйкес.
Егер де Rк = болса, онда қозғалтқыш желіден қоректенбейді де сыртқы резистор Rш -қа динамикалық тежеу режимінде жұмыс істейді, ал сипаттама координата басынан өтеді. Rк — ның басқа мәні кезінде сипаттамалар осы екі сипаттаманың арасында жатады.
Егер де Rк = cоnst, ал Rш = var болса, онда топтас сипаттамалар 3.35-суретте көрсетілген.
3.35-сурет. Тізбекті резистор Rк тұрақты, ал шунттық резистор Rш өзгеріп тұрған кездегі топтас механикалық сипттамалар
Бұл топтас сипаттамалар шунттық резистордың кедергісі зәкір тоғына әсер етпейтін ортақ нүктесі В бар. Бұл жағдай тек белгілі теріс бұрыштық жылдамдығы кезінде орындауға болады, яғни
(3.55)
Бұл жағдай кезінде Rш кедергісі қандай да болсын ток өткізбейді, себебі зәкірдің щеткаларының арасындағы потенциалдар айырмасы нөлге тең.
Қозғалтқыш тұтынатын тоғы
(3.56)
В нүктедегі бұрыштық жылдамдықгы (3.52) теңдеуге Ія токтың мәнін қойып және Е-мен U-дың мәндерін в және 0 мәндерімен алмастырып табуға болады, яғни
(3.57)
Rк тұрақты, ал Rш өзгеріп тұрған кезде шеткі жағдайларда 3.12-суретте қалың сызықпен көрсетілген екі сипаттаманы табамыз.
Егер де Rш = 0 болса, онда қозғалтқыш динамикалық тежеу режимінде жұмыс істейді, ал сипаттама табиғи сипаттамаға параллел болады.
Егер де Rш = болса, онда шунттық резистор ажыратылғандай болады, ал қозғалтқыш резистор Rқ бар реостаттық сипаттамада жұмыс істейді. Rш -ның аралык мәндері кезінде қалған сипаттамалар көрсетілген екі сипаттаманың арасында жатады.
9.5 Тізбектей қоздырылатын тұрақты ток қозғалтқышының бұрыштық жылдамдығын реттеу
а) Зәкір орамасын шунттау арқылы бұрыштық жылдамдықты реттеу
3.37-сурет. Зәкір орамасын шунттау арқылы қозғалтқыштың бұрыштық жылдамдығын реттеу
3.37-суретте келтірілген сұлба бойынша бұрыштық жылдамдықты зәкірдің кернеуін азайту, магнит ағынын өзгерту және реостатты реттеу арқылы жүзеге асырылады.
Егер де резистор Rш кедергісін өзгертіп тұратын болсақ, ондағы ток Ія тұрақты десек, онда әр түрлі Іқ=Ія+Іш қоздыру тоғы туады.
3.38 а,б-суретте қозғалтқыш осы сұлба бойынша қосылған кездегі механикалық сипаттамалар көрсетілген.
Rш = ∞ кезде якорь тізбегінің Rқ кедергісі бар резисторды қосқандағы сипаттама болады.
Егер де Rш = 0 болса, онда зәкір кернеуі нөльге тең болады, сол себептен сипаттама координата басынан өтетін түзу сызық Rк =∞ болса, қозғалтқыш желіден ажыратылған болады да, ол моментті құрмайды.
Егер де Rк = 0 болса,онда Rш мен Rя тізбектері параллел қосылған кездегі сипаттама болады.
3.38-сурет. Зәкір орамасын шунттаған кездегі тізбектей қоздырылатын тұрақты ток қозғалтқышының сипаттамалары
3.37-суреттегі сұлба бойынша реттеу шектері (2.5-3):1 болады.
Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу сұлбасы 3.39 суреттге көрсетілген.
3.39 сурет-Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу сұлбасы
Бұл сұлба бойынша бұрыштық жылдамдық қозғалтқыштың магнит ағынын өзгерту арқылы орындалады, себебі якорь тоғы Ія тұрақты кезде резистор Rш арқылы қоздыру токты Іқ = Iя-Iш өзгертуге болады. Магнит ағынының азаю себебінен негізгі жылдамдықтан реттеу жоғары жасалады.
Жүктеме тұрақты кезде қозғалтқыштың бұрыштық жылдамдықты реттеу шектері 2:1.
3.40- сурет.Қоздыру ораманы шунттау арқылы бұрыштық жылдамдықты реттеу кезіндегі механикалық сипаттамалар
20.Тізбектей қоздырудағы тұрақты тоқтағы қозғалтқыштардың жасанды электромеханикалық және механикалық сипаттамаларын құру.
Сандық мәнін анықтау үшін реостат мінездемесінің өзін құру қажет емес.
Алғашында табиғи мінездеме құрайық және оның үстіне бір сатыдан екінші сатыға ауысатын резистор үшін I1 мен I2 тоқ мәндерін белгілейік. Қозғалтқыштың ішкі кедергісіне сәйкес координатаның бастапқы сол жағынан ОА ұзындығымен А нүктесіне дейін сызамыз. А нүктесі арқылы Аf вертикалін саламыз. Табиғи мінездеме нүктесін өткіземіз: I1 мен I2, тоқ мәндеріне сәйкес f пен l сәйкес нүктелерінде Аf вертикаліне параллель сызық сызамыз. Координата осінің сол жағынан мынандай бөлшектер қалдырамыз : Оа=R1=U/I1 және Оg=R2=U/I2 . а мен е және g мен f нүктелерін біріктіреміз және бұдан шығатын екі сызық қозғалтқыштың жылдамдығы мен қозғалтқыш зәкіртті тізбегінің арасындағы сызыққа сәйкес және бұдан шығатын теңдеу:
| |  | (8.13) |
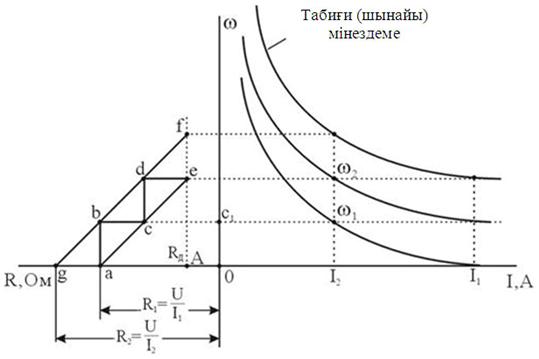
8.7 Cурет – Тізбектей қоздырылатын тұрақты тоқ қозғалтқышының реостатты табиғи сипаттамаларын тұрғызудың графикалық әдісі
Қосылу сатылары және оның кедергілерінің санын анықтау үшін: а нүктесі арқылы с нүктесінің gf сызығы мен b нүктесіне дейін вертикаль өткізеді. Сосын b нүктесі арқылы сызық өткізеді. Соған ұқсас cd және de сызықтары өткізіледі.Соңғы горизонталь е нүктесі арқылы өтсе, құрылымның сәтті шыққаны, егер бұндай болмаса, fg немесе ае сызықтарының біреуінің еңістігін өзгерту арқылы қайта құру қажет. Bc қимасы реостаттың бірінші сатысына сәйкес, ал de екінші сатысына сәйкес.
Қосу сәтінде зәкір тоғы I1 тең, ал зәкір тізбегінің барлық кедергісі
жылдамдығына дейінгі екпінінде тоқ азаяды, b нүктесінде тоқ I2 тең. Сосын реостат кедергісін азайту керек, зәкір тізбегінің кедергісі сс1 қимасының масштабына тең бола бастайды. Тоқ тағы да I1 мәніне жетеді және тағы солай әбден қозғалтқыш табиғи інездемесінде жұмыпс істемейіеше қайталана береді. Суретте құрылымның екі сатыдан тұратыны көрінеді. Bc қимасы реостаттың бірінші сатысына сәйкес, ал de – екіншісіне. Бұл суретте реостат кедергілерінен алынған қозғалтқыштың екі реостаттық мінездемелер көрсетілген.
8.4 Қарсы қосу тәртібі
Тізбектей қоздырғышты қозғалтқыш үшін екі тежеуіш тәртібі мүмкін: қарсы қосу тежеуіші және динамикалық тежеуіш. Желіге қуат беретін рекуперативті тежеуіш қозғалтқыштар үшін мүмкін емес, себебі қозғалтқыш ЕҚК желінің кернеуінен көп бола алмайды.
Тәуелсіз қоздырғышты қозғалтқыш сияқты тізбектей қоздыртқышты қозғалтқышты қарсы қосу тәртібінде екі тәсілмен көшіруге болады.
Бірінші тәсілде қозғалтқышта кедергінің статикалық сәті жалғануы керек. Қозғалтқыш зәкірінің тізбегіне қосымша резистор қосылады, бұл жағдайда қозғалтқыш жасанды механикалық мінездемеде жұмыс істеуге ауысады. Қозғалтқыш тәртіп жұмысында кедергі сәті үлкейеді, сонымен қатар қозғалтқыш жылдамдығы азаяды. Кедергі сәті Мк қысқа тұйықталу сәтіне тең болғанда, қозғалтқыш зәкірі тоқтайды
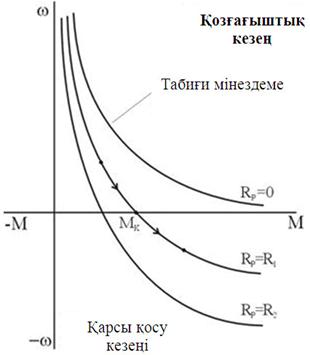
8.8 Cурет – Қарсы қосу режиміндегі реостатты механикалық сипаттамалар
Екінші тәсілде қозғалтқыштың қарсы қосу тәртібіне көшуі қозғалтқыш реверсі арқылы жүзеге асады. Егер қозғалтқыш тәртібіндегі электр жетек жұмысында