Файл: Лабораторная работа 1 структурный и кинематический анализ плоского механизма выполнил студент.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 17
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ВОЕНМЕХ» им. Д.Ф. УСТИНОВА
Кафедра системы приводов, мехатроника и робототехника (И8)
Дисциплина «Теория машин и механизмов»
Лабораторная работа № 1
СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО МЕХАНИЗМА
| Выполнил студент | Яшков А.Р. | |||
| Фамилия И.О. | ||||
| группа | Е202Б | | ||
| | ||||
| Преподаватель | Ельчинский В. С. | |||
| | Фамилия И. О. | |||
| | Подпись преподавателя | Дата | ||
| Допуск | | | ||
| Выполнение | | | ||
| Защита | | | ||
Санкт-Петербург
2022 г.
-
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
На рисунке представлена схема исследуемого четырёхзвенный рычажного механизма с тремя подвижными звеньями.
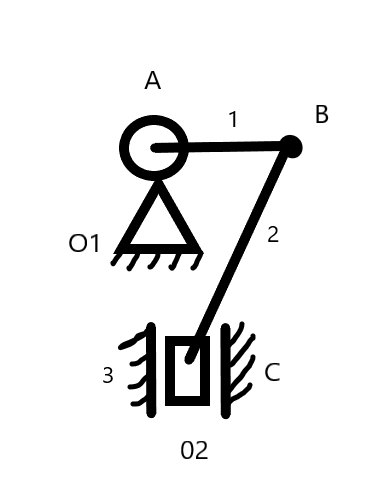
Число степеней свободы по формуле Чебышева для плоских механизмов
W=3n-2p5-p4=3*3-2*4=1.
где n – количество подвижных звеньев, p5 и p4 –количество кинематических пар 5-го и 4-го класса соответственно.
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Кинематический анализ производится экспериментально-аналитически.
Функцию S(ϕ1
) положения ползуна 3 в зависимости от угла поворота кривошипа 1 получаем экспериментально в виде таблицы с шагом 10о по углу поворота кривошипа. Результаты эксперимента представлены в таблице 1.1.
Таблица 1.1
| i | ϕ1o | | Si, м | i | ϕ1o | | Si, м | i | ϕ1o | S, м | Si, м |
| 0 | 0 | | 0 | 13 | 130 | | 0.072 | 26 | 260 | | 0.061 |
| 1 | 10 | | 0.007 | 14 | 140 | | 0.076 | 27 | 270 | | 0.056 |
| 2 | 20 | | 0.01 | 15 | 150 | | 0.079 | 28 | 280 | | 0.049 |
| 3 | 30 | | 0.012 | 16 | 160 | | 0.081 | 29 | 290 | | 0.041 |
| 4 | 40 | | 0.017 | 17 | 170 | | 0.083 | 30 | 300 | | 0.035 |
| 5 | 50 | | 0.023 | 18 | 180 | | 0.084 | 31 | 310 | | 0.028 |
| 6 | 60 | | 0.03 | 19 | 190 | | 0.083 | 32 | 320 | | 0.022 |
| 7 | 70 | | 0.035 | 20 | 200 | | 0.082 | 33 | 330 | | 0.015 |
| 8 | 80 | | 0.042 | 21 | 210 | | 0.081 | 34 | 340 | | 0.010 |
| 9 | 90 | | 0.05 | 22 | 220 | | 0.079 | 35 | 350 | | 0.006 |
| 10 | 100 | | 0.056 | 23 | 230 | | 0.075 | 36 | 360 | | 0 |
| 11 | 110 | | 0.061 | 24 | 240 | | 0.071 | | | | |
| 12 | 120 | | 0.066 | 25 | 250 | | 0.067 | | | | |
Полагая, что кривошип вращается с постоянной угловой скоростью ω1=29c-1 , следовательно, ϕ1=ω1t, получим функцию положения от времени S(t). Для этого вычислим шаг таблицы по времени: Δt = Δϕ1 рад /ω1 = 0,17453/29 = 0,006018 с, где Δϕ1 рад = Δϕ1°/180 = 10/180 = 0,17453 рад.
Для аналитической обработки функции S(t) проведем ее аппроксимацию и фильтрацию пятью методами. Обработку данных эксперимента проведем с помощью программы ApproxFSP.exe.6.0.
3. Аппроксимация функции положения тригонометрическим рядом Фурье.
В этом случае функцию S(t) разлагаем в тригонометрический ряд Фурье и дифференцированием ряда определяем зависимости скорости v(t) и ускорения а(t) ползуна. При этом необходимо решить вопрос об оптимальном числе членов ряда. Разложение функции в такой ряд означает её приближенную замену тригонометрическим полиномом, являющимся суммой ряда:
Sф(t)=
 )
)где Aj , Bj – коэффициенты ряда, pj = 2πj/T – частоты, по которым производится разложение, T = 2π/ω1=2π/28 = 0.224 с – время полного оборота кривошипа Cj– амплитуда j-й гармоники, j – её фаза, m – число членов ряда. В данном случае функция S(t) задана таблицей значений в конечном числе точек n = 36, поэтому максимальное число членов ряда mmax = n/2 = 36/2 = 18.
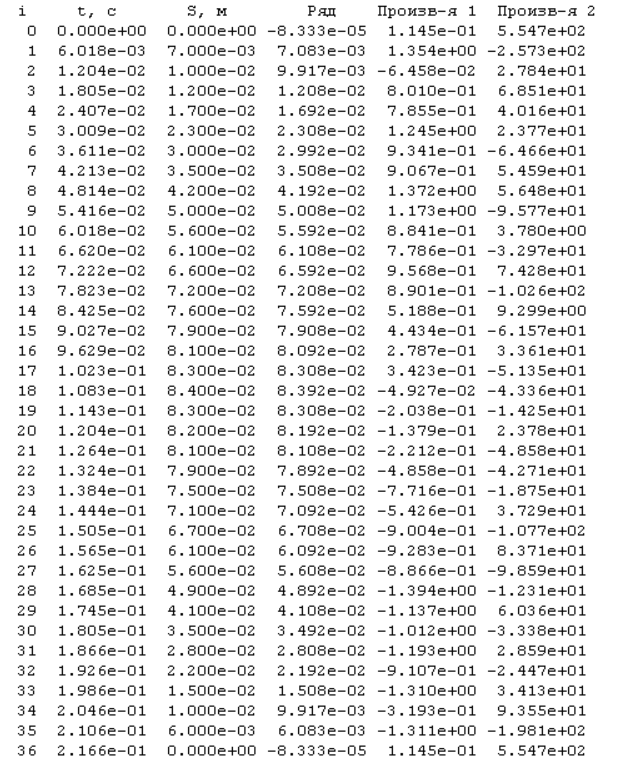
На первом этапе разложим S(t) в ряд с максимально возможным числом членов m = 18. Результаты представлены на рис.1 и в табл.1. В этом случае значения ряда Фурье в узлах практически совпадают с данными эксперимента.
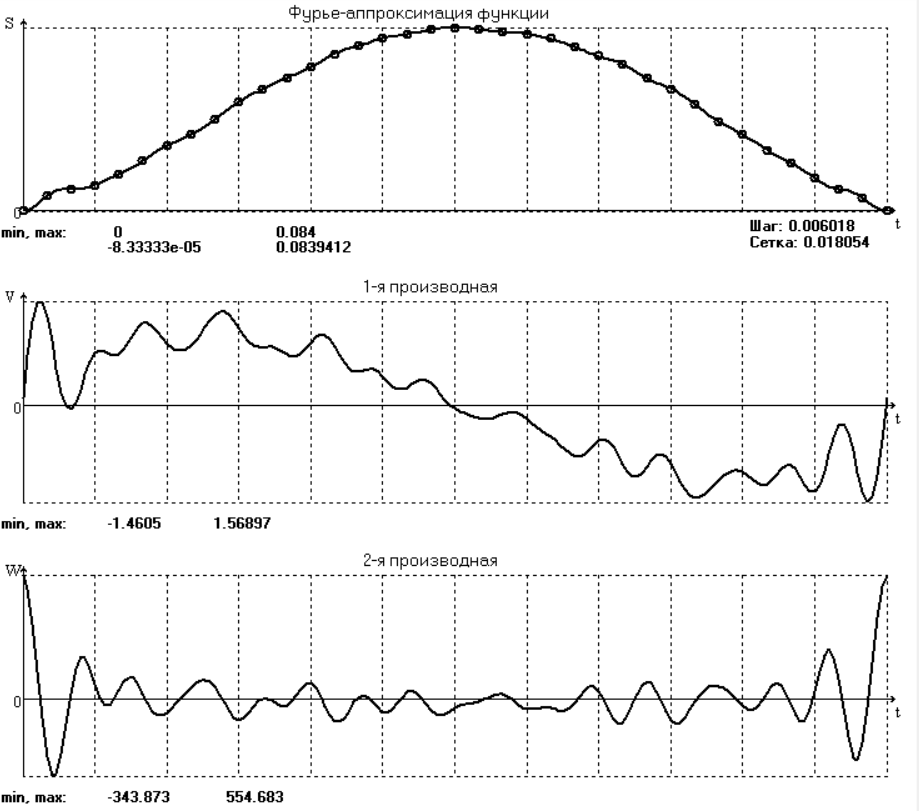
На графике скорости и особенно ускорения явно видны паразитные осцилляции, вызванные погрешностями работы механизма и погрешностями замера значений S(t). Во многих случаях возникает потребность сглаживания такого рода зависимостей.
Оценим значимость членов ряда с помощью амплитудного спектра, показанного на рис.2 и в табл.2.
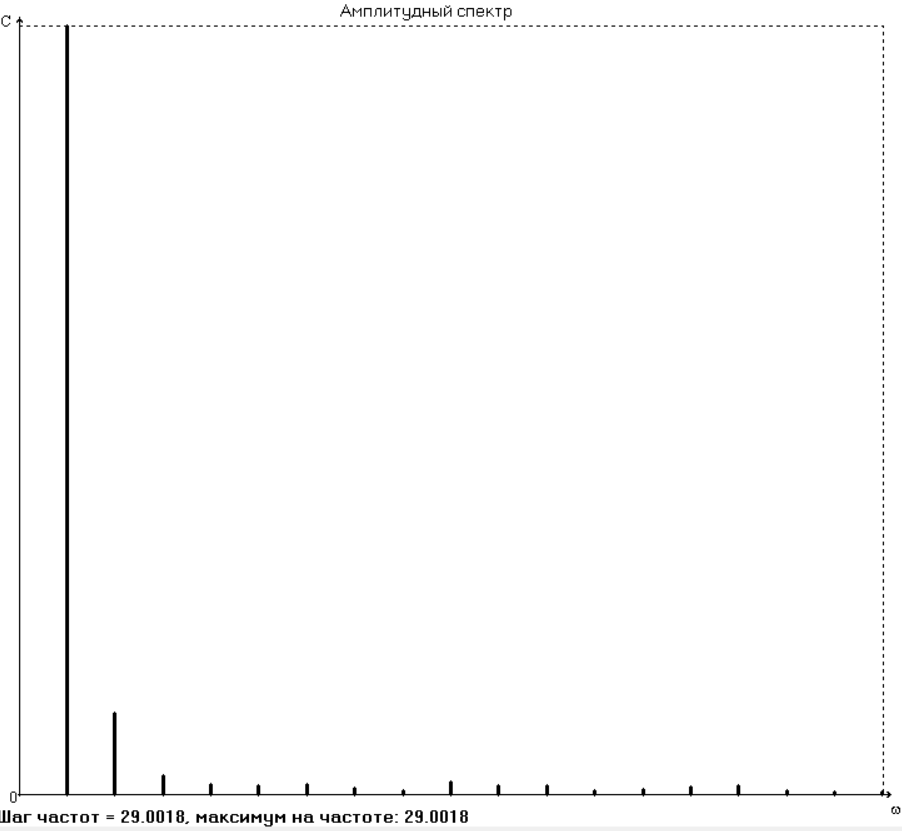
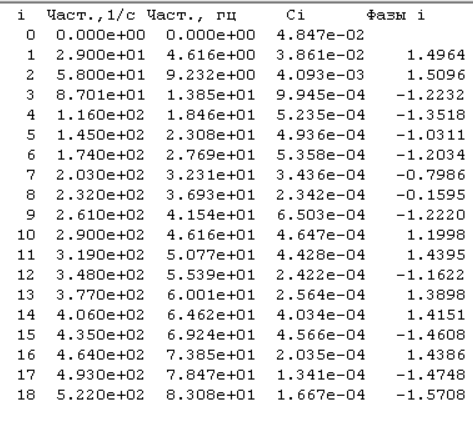
АналÐ