Файл: Лабораторная работа 2 структурный и кинематический анализ и синтез плоских кулачковых механизмов.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 276
Скачиваний: 6
| Выполнила студент | Яшков А.Р.. | |||
| Фамилия И.О. | ||||
| группа | Е202Б | | ||
| | ||||
| Преподаватель | Ельчинский В. С. | |||
| | Фамилия И. О. | |||
| | Подпись преподавателя | Дата | ||
| Допуск | | | ||
| Выполнение | | | ||
| Защита | | | ||
W = 3n – 2p5 – p4 = 3⋅2 – 2⋅2 – 1 = 1,где n – количество подвижных звеньев, p5 и p4 – количество кинематических пар 5-го и 4-го класса соответственно2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМАКинематический анализ производится экспериментально-аналитически. Функцию S(φ1) положения толкателя 2 в зависимости от угла поворота кулачка 1 получаем экспериментально в виде таблицы с шагом 10° по углу поворота кулачка. Результаты эксперимента представлены в таблице
| i | ᵠ | S(м) | i | ᵠ | S(м) |
| 0 | 0 | 0 | 19 | 190 | 0,025 |
| 1 | 10 | 0,002 | 20 | 200 | 0,025 |
| 2 | 20 | 0,004 | 21 | 210 | 0,025 |
| 3 | 30 | 0,009 | 22 | 220 | 0,025 |
| 4 | 40 | 0,014 | 23 | 230 | 0,025 |
| 5 | 50 | 0,019 | 24 | 240 | 0,025 |
| 6 | 60 | 0,023 | 25 | 250 | 0,025 |
| 7 | 70 | 0,024 | 26 | 260 | 0,025 |
| 8 | 80 | 0.025 | 27 | 270 | 0,024 |
| 9 | 90 | 0.025 | 28 | 280 | 0,023 |
| 10 | 100 | 0.025 | 29 | 290 | 0,021 |
| 11 | 110 | 0.025 | 30 | 300 | 0,018 |
| 12 | 120 | 0.025 | 31 | 310 | 0,013 |
| 13 | 130 | 0.025 | 32 | 320 | 0,010 |
| 14 | 140 | 0.025 | 33 | 330 | 0,008 |
| 15 | 150 | 0.026 | 34 | 340 | 0,007 |
| 16 | 160 | 0,028 | 35 | 350 | 0,003 |
| 17 | 170 | 0,025 | 36 | 360 | 0 |
| 18 | 180 | 0,025 | | | |

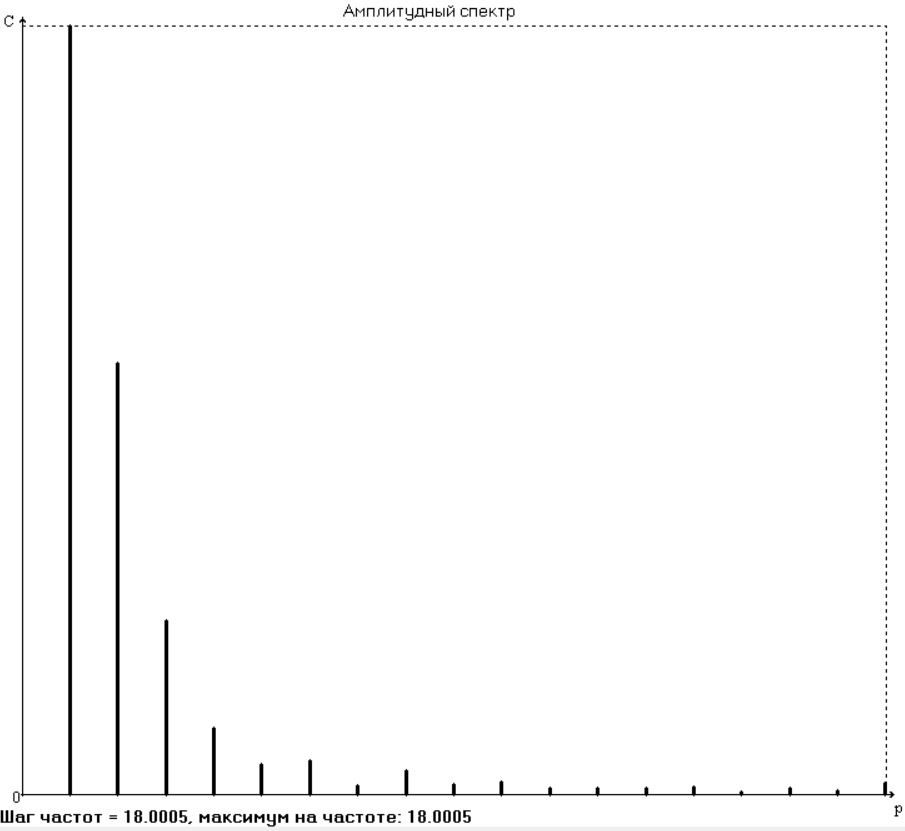
Полагая, что кулачок вращается с постоянной угловой скоростью ω1 = 23 рад/с, следовательно, φ1 = ω1*t, получаем функцию положения от времени S(t). Δϕ1 рад = Δϕ1°/180 = 10/180 = 0,17453 рад. Вычислим шаг таблицы по времени: : Δt = Δϕ1 рад /ω1 = 0,17453/23 = 0,007588 с. Для аналитической обработки функции S(t) проводим её аппроксимацию и фильтрацию пятью методами. Обработку данных эксперимента выполним с помощью программы ApproxFSP.exe3.1. Аппроксимация функции положениятригонометрическим рядом ФурьеВ этом случае функцию S(t) разлагаем в ряд Фурье и дифференцированием ряда определяем зависимость скорости v(t) и ускорения а(t)ползуна. При этом необходимо решить вопрос об оптимальном числечленов ряда. Разложение функции в ряд Фурье означает её приближенную замену тригонометрическим полиномом, являющимся суммой рядагде Aj, Bj – коэффициенты ряда, pj = 2π j/T– частоты, по которым производится разложение, T =2π/ω1 = 2π/23 = 0,27 с – время полногооборота кулачка; 2 2 Cj = (Aj + Bj)^(1/2) – амплитуда j-й гармоники, αj – еёфаза, m – число членов ряда.В данном случае функция S(t) задана таблицей значений в конечном числе точек n = 36, поэтому максимальное число членов рядаmmax = n/2 = 36/2 = 18.Формулы для вычисления коэффициентов ряда Фурье при табличном задании функции [2]:На первом этапе разложим S(t) в ряд с максимально возможнымчислом членов m = 18. Результаты представлены на рис. 3.1 и втабл. 3.2. В этом случае значения ряда Фурье в узлах близки к даннымэксперимента, но в промежутках между узлами наблюдаются волнообразные отклонения, особенно заметные на графиках производных.В частности, на фазах ближнего и дальнего выстоя скорость и ускорение должны быть равны нулю, а аппроксимирующая функция осциллирует. Во многих случаях возникает потребность в сглаживаниитакого рода зависимостей.Оценим значимость членов ряда с помощью амплитудного спектра функции,
Анализ амплитудного спектра исследуемой функции показывает, что основными частотами, присутствующими в ней, являются первые шесть, однако исследования, проведённые с помощью программы ApproxFSP, показали, что наилучшая аппроксимация получается при учете первых десяти частот. Результаты представлены на рис. 3.3 и в табл. 3.4. Функция аппроксимирована удовлетворительно на всем участке. Первая производная (скорость толкателя) удовлетворительно аппроксимирована на фазах удаления и возврата, на фазах выстоя заметны погрешности. Вторая производная (ускорения толкателя) аппроксимирована неудовлетворительно. Аппроксимирующее выражение (3.1) для данной функции с учетом первых пяти членов ряда приобретает вид SФ(t) = 0,01947 + 0,009845 sin(18t -1,4684) + 0,005657 sin(36t -1,4468) + 0,002345 sin(54t +0,0435) + 0,0009667 sin(72t -0,2561) + 0,0005363 sin(90t +0.2810) 3.2. Фильтрация функции с помощью скользящих среднихСкользящие средние являются одним из простейших цифровыхфильтров. Сглаженная (отфильтрованная) функция получается путёмвычисления средних арифметических значений по указанному числуточек. При этом первые и последние точки в таблице отфильтрованной функции сохраняют свои значения.В данном исследовании функция задана в 36 точках: S0, S1, S2,…S36.Далее мы строим скользящие средние по трем точкам, и отфильтрованными значениями функции будут:Sф0 = S0;Sф1 = (S0 + S1 + S2)/3;Sф2 = (S1 + S2 + S3)/3;…Sф35 = (S34 + S35 + S36)/3;Sф36 = S36.Исследования, проведенные с помощью программы ApproxFSP,показали, что увеличение числа точек, по которым вычисляютсясредние, приводит к увеличению погрешности аппроксимации самойфункции на фазе дальнего выстоя, а существенного улучшения сглаживания на фазах удаления и возврата при этом не происходит. Оптимальным в данном случае можно признать сглаживание по трём точкам. Оценим качество фильтрации. Функция аппроксимирована удовлетворительно, со сглаживанием. Первая производная аппроксимирована в целом удовлетворительно за исключением начала фазы удаления. Вторая производная сглажена неудовлетворительно. Кроме того, на графиках производных начальное значения не равно конечному, в то время как в данном случае они должны быть
равны по физическому смыслу этих функций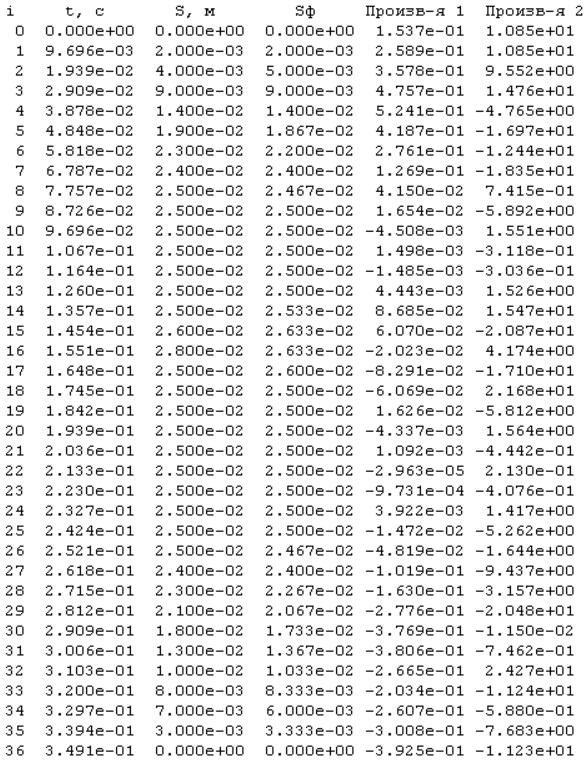
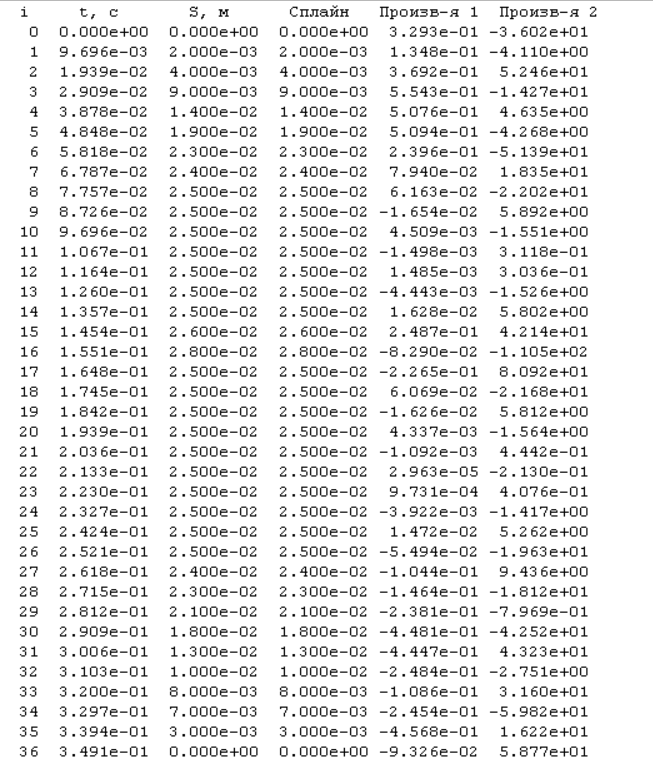
3.3. Применение интерполяционного сплайна
Интерполяционный кубический сплайн – это совокупность полиномов третьей степени: SСi(t) = Si + bi(t – ti) + ci(t – ti) 2 + di(t – ti) 3 , (3.3) где Si – значения аппроксимируемой функции в узлах, ti – значения аргумента в узлах, 푏푖, 푐푖, 푑푖 – коэффициенты сплайна для i-го участка, i = 0,1,2, … n–1– номер участка, n – число точек в таблице, считая с нуля. Построение такого сплайна состоит в определении коэффициентов bi, ci, di. Тогда для каждого i-го участка по формуле (3.3) можно найти значение сплайна SСi(t) для любого ti ≤ t ≤ ti+1, которое и будет приближённым значением функции S(t). Алгоритм построения сплайна вида (3.3) описан в работах [4, 5]. Дифференцированием аппроксимирующей функции (3.3) определяется скорость звена: v(t) ≈ vСi(t) = bi + 2ci(t – ti)+ 3di(t – ti) 2 , (3.4) в частности, значения производной в узлах v(t) ≈ bi . Результаты аппроксимации представлены на рис. 3.5 и в табл. 3.6. Как и следует из названия, этот сплайн дает интерполирующую аппроксимацию. Операция сглаживания с его помощью невозможна. Этот метод целесообразно применять в тех случаях, когда аппроксимирующую функцию надо проводить в точности по исходным точкам. Здесь на графиках производных также наблюдается неравенство значений производных в крайних точках.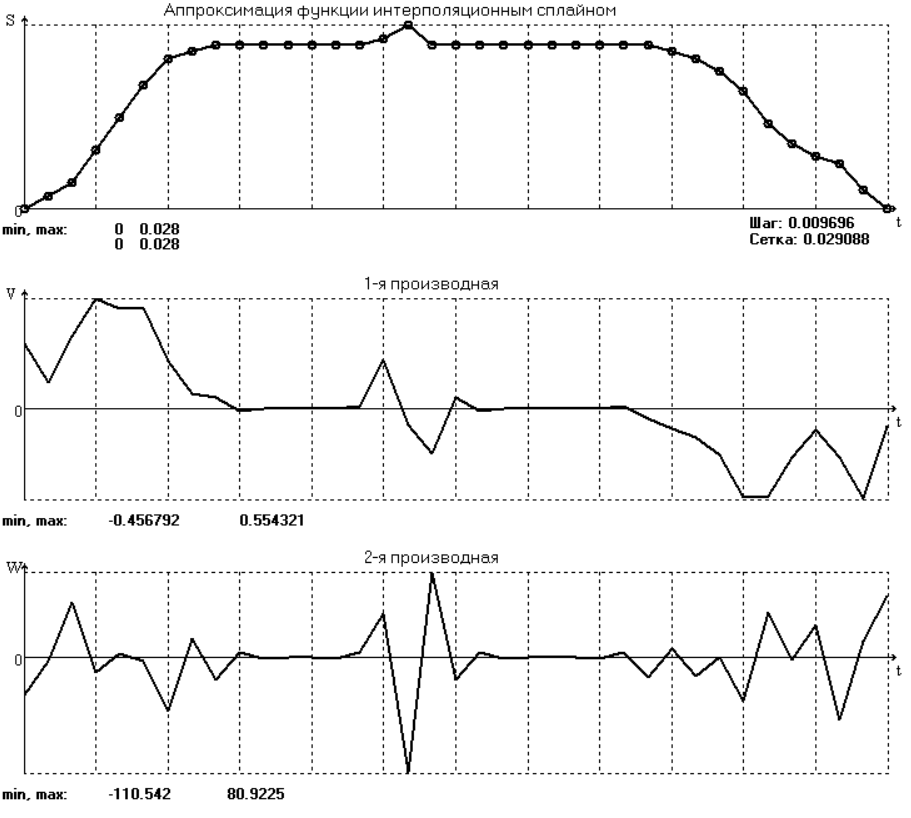
3.4. Применение сглаживающего сплайна
Для построения сглаживающего сплайна формируется так называемый “коридор” (рис. 3.6), т.е. для каждой точки задается максимально и минимально допустимое значение функции, а сам сплайн строится так, чтобы его график проходил между точками этого коридора, минимизируя энергию изгиба. Коридор, показанный на рис. 3.6, сформирован так, чтобы “закрепить” начальную точку и точки на фазах дальнего и ближнего выстоя. Результаты показаны на рис. 3.7 и в табл. 3.7. Функция аппроксимирована удовлетворительно, со сглаживанием. Однако на графиках производных проявляется основной недостаток – неравенство начального и конечного значений, в то время как функция в данном случае периодична по своей сути.