Файл: Отчет по лабораторной работе 1 по дисциплине Теория систем автоматического управления.docx
Добавлен: 30.11.2023
Просмотров: 83
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования РФ
ФГАОУ ВПО
Национальный исследовательский технологический университет «МИСИС»
Институт Информационных технологий и компьютерных наук (ИТКН)
Кафедра Инфокоммуникационных технологий (ИКТ)
Отчет по лабораторной работе №1
по дисциплине «Теория систем автоматического управления»
на тему «Освоение программного обеспечения для исследования систем автоматического управления»
Выполнил:
студент группы
Проверил:
Сириченко А. В.
Москва,
Цель работы: получить начальные сведения о системе MATLAB и ее пакетах Simulink и Control System Toolbox и навыки работы с ними.
Задание 1.
Вычислите несколько произвольно заданных числовых выражений, используя MATLAB.

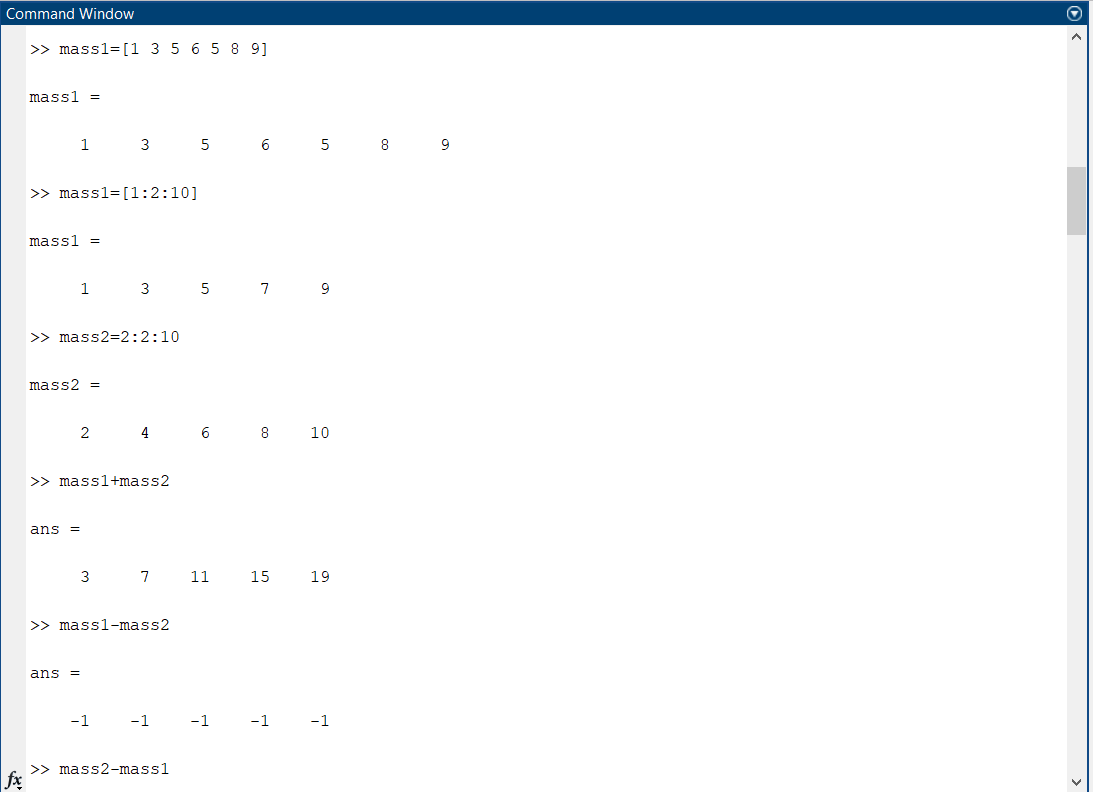
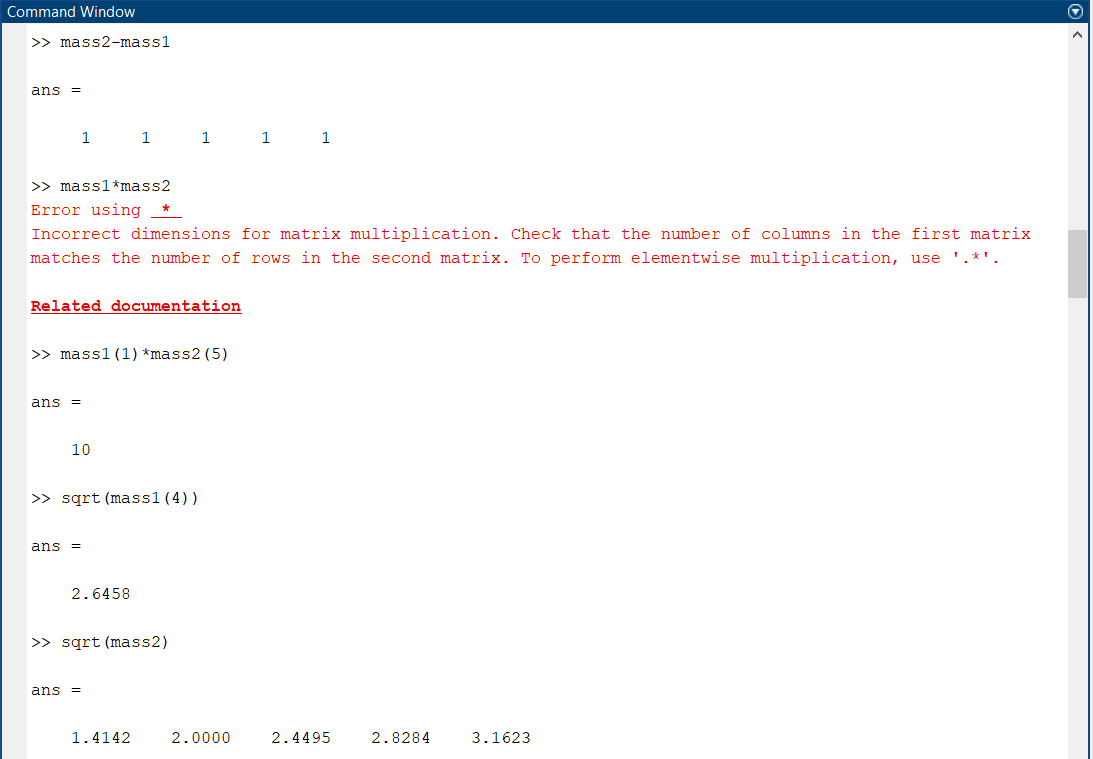
Задание 2.
Создайте несколько массивов различными способами и выполните с ними произвольные действия.

Задание 3.
Выведите на экран список переменных рабочего пространства и сохраните рабочее пространство в файле с произвольным именем; затем удалите все переменные из рабочего пространства и убедитесь, что оно очищено; снова загрузите сохраненное рабочее пространство.

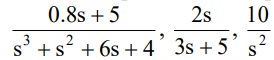
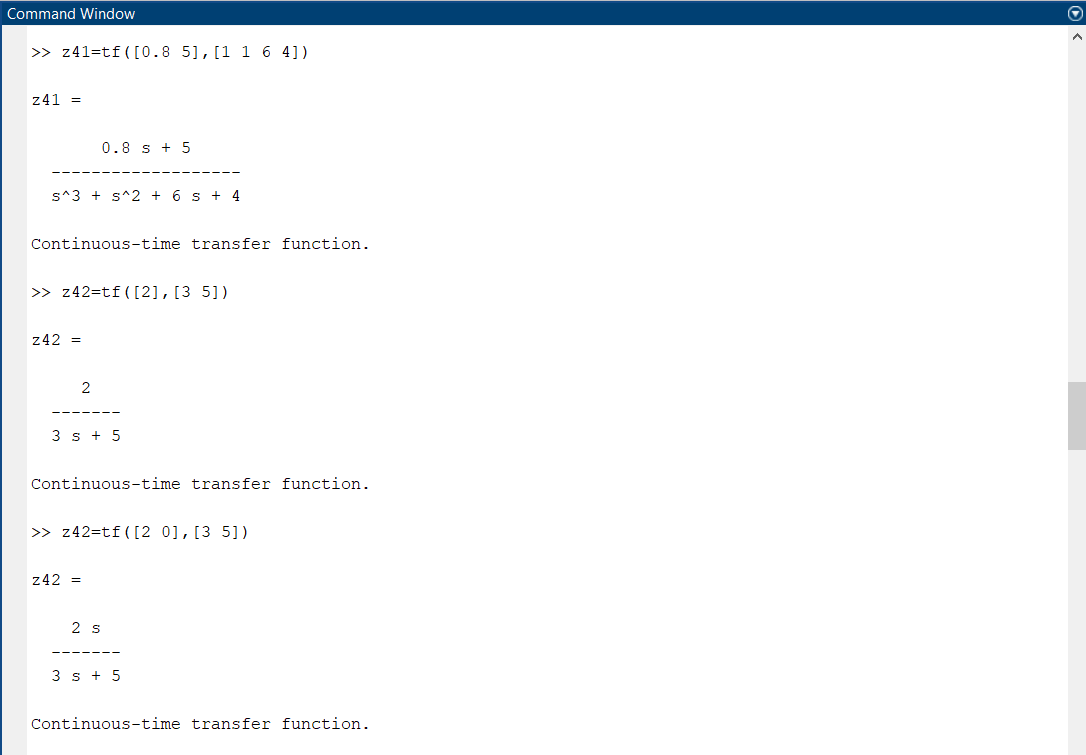
Задание 4.
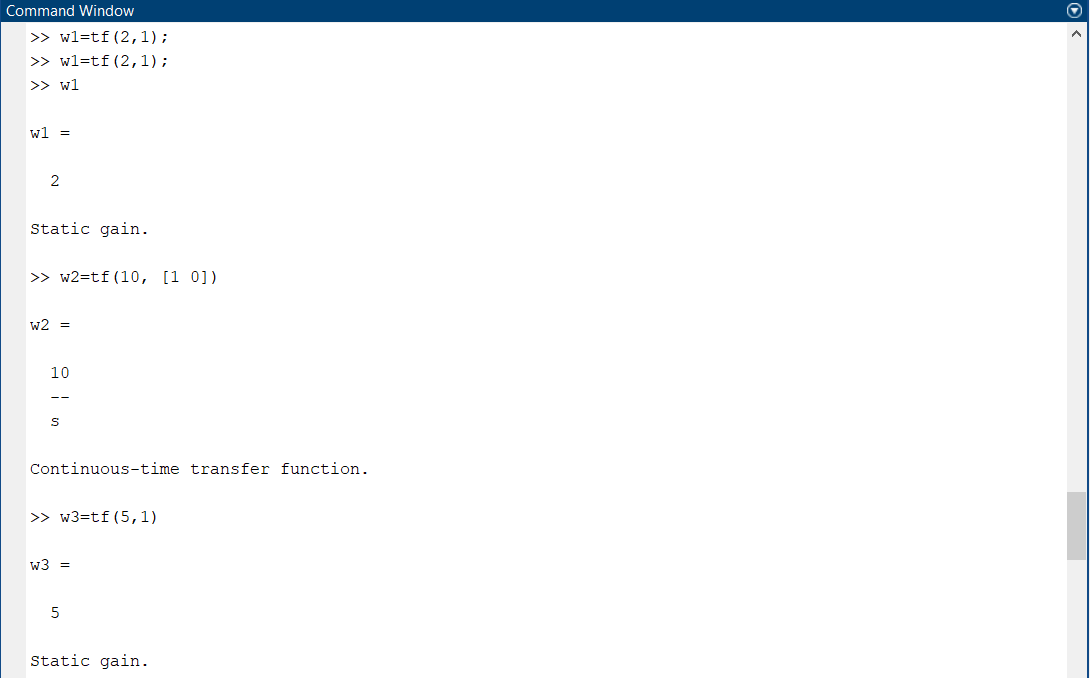
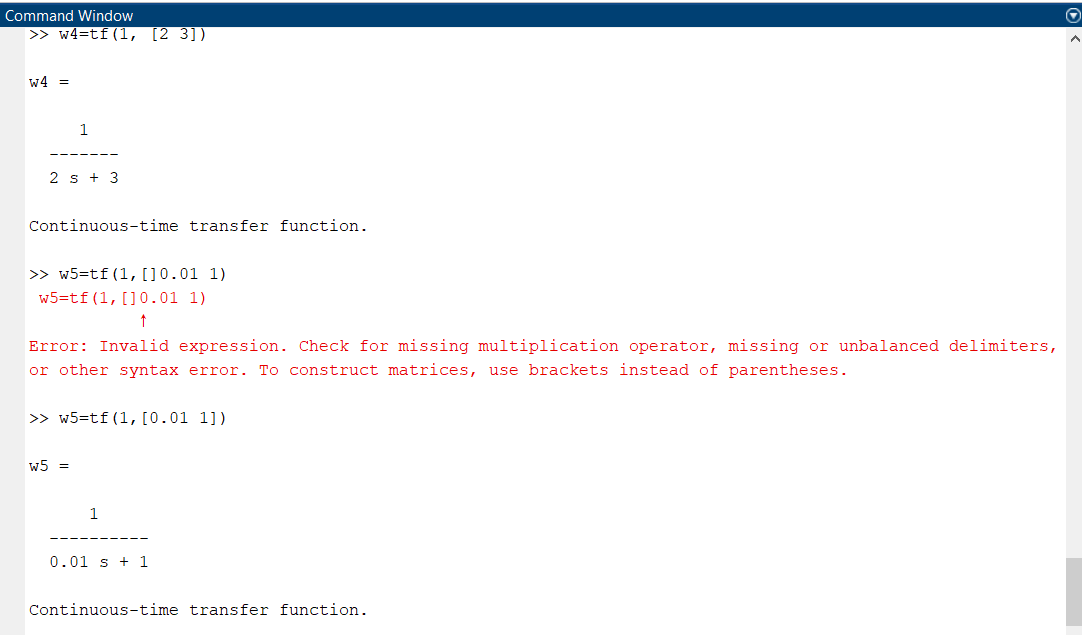
Создайте объекты с передаточными функциями:

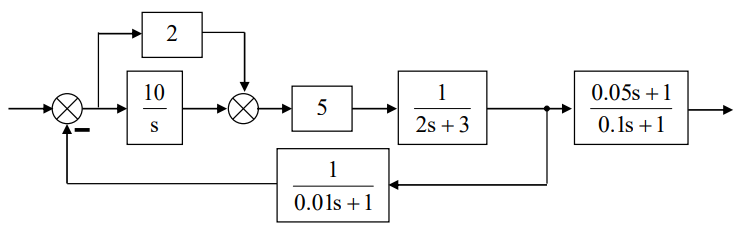
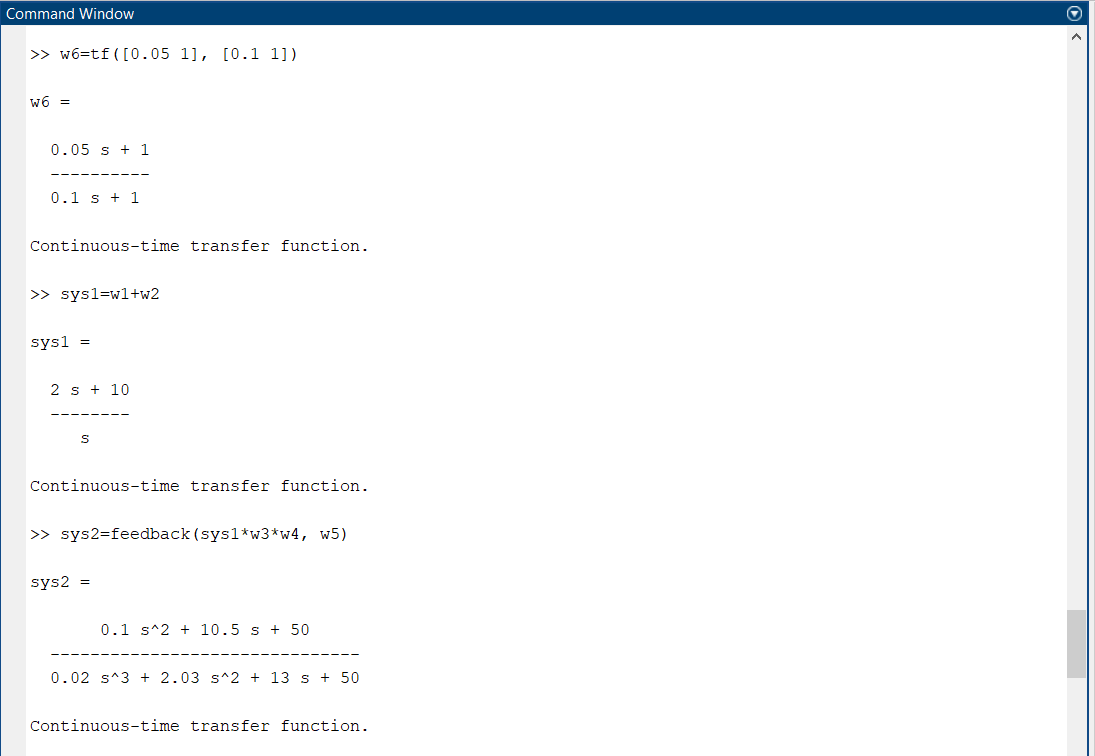
Задание 5.
Создайте модель системы, структурная схема которой показана.
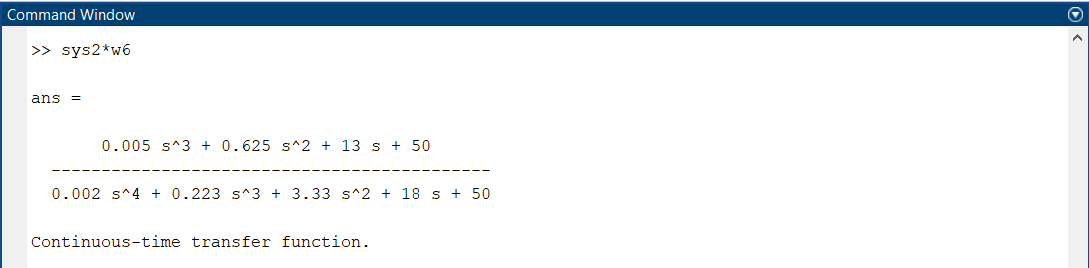
Задание 6.
Создайте объект с передаточной функцией
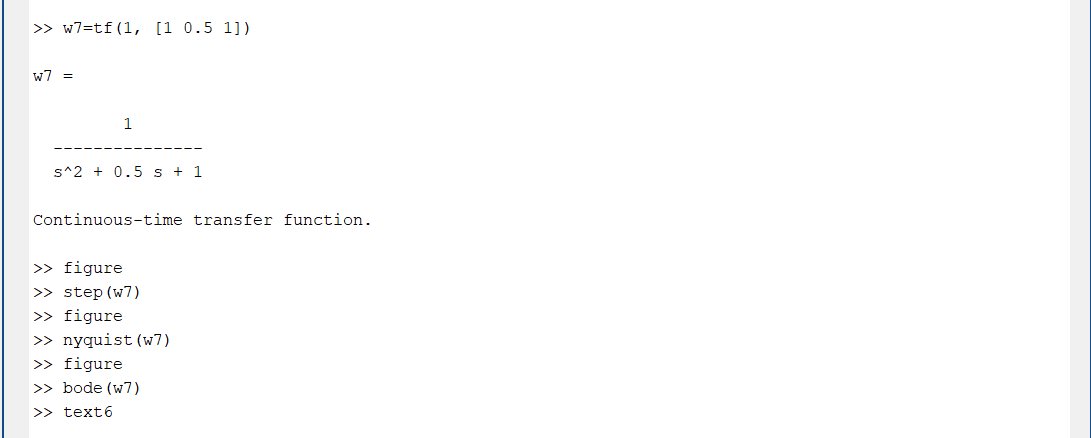
Задание 7.
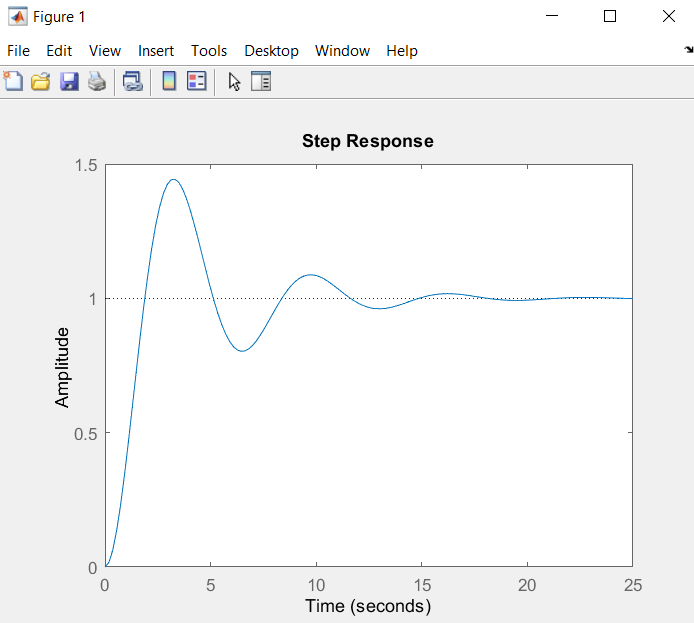
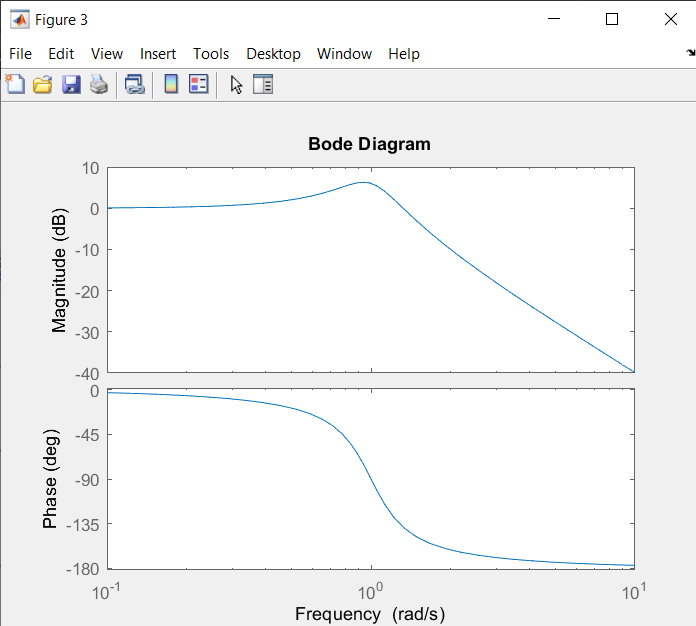
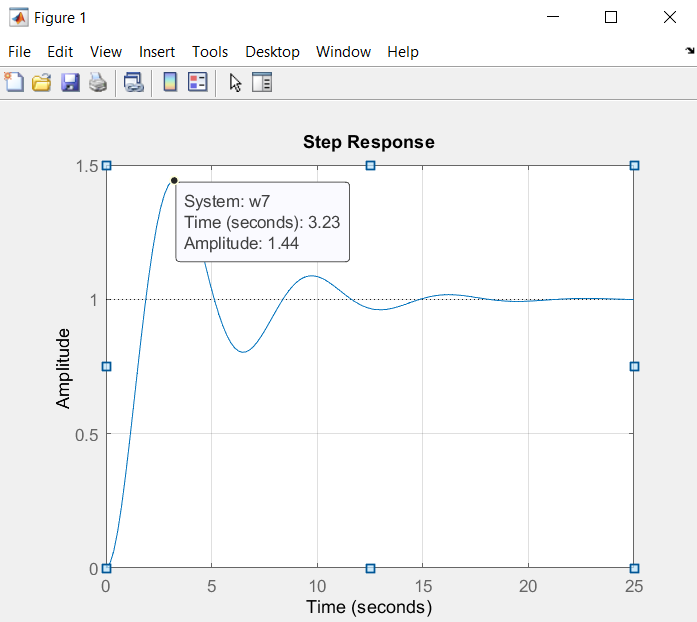
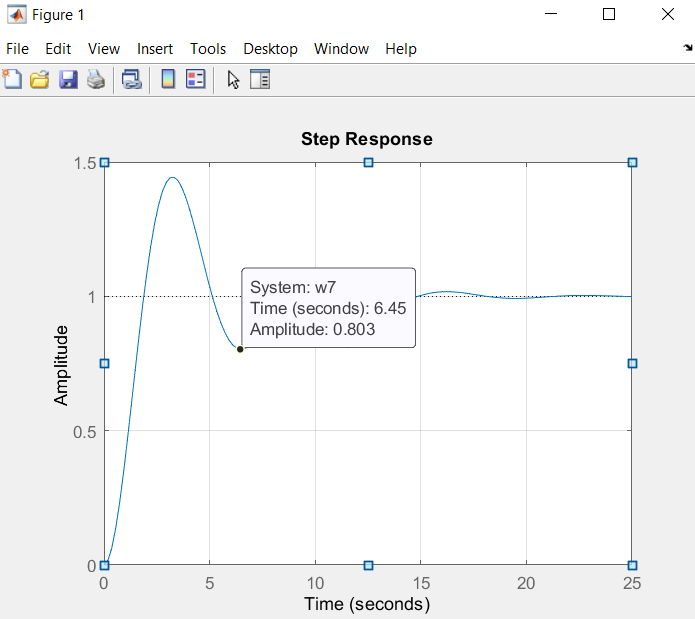
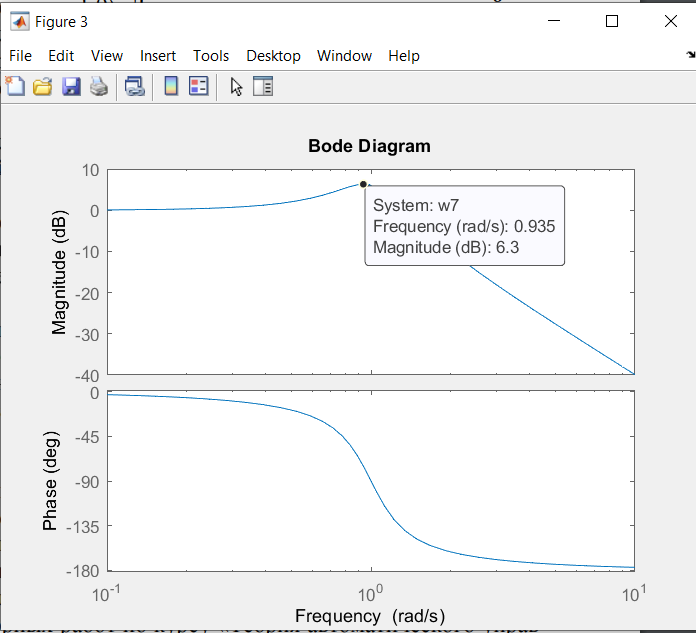
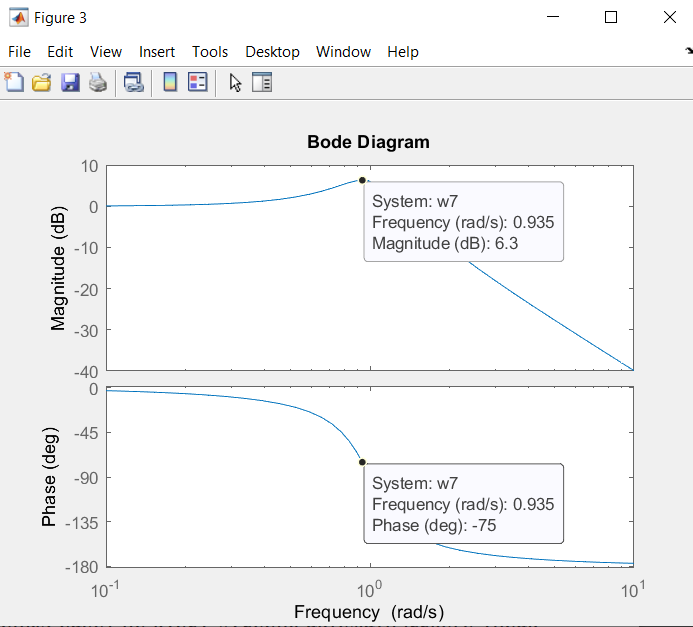
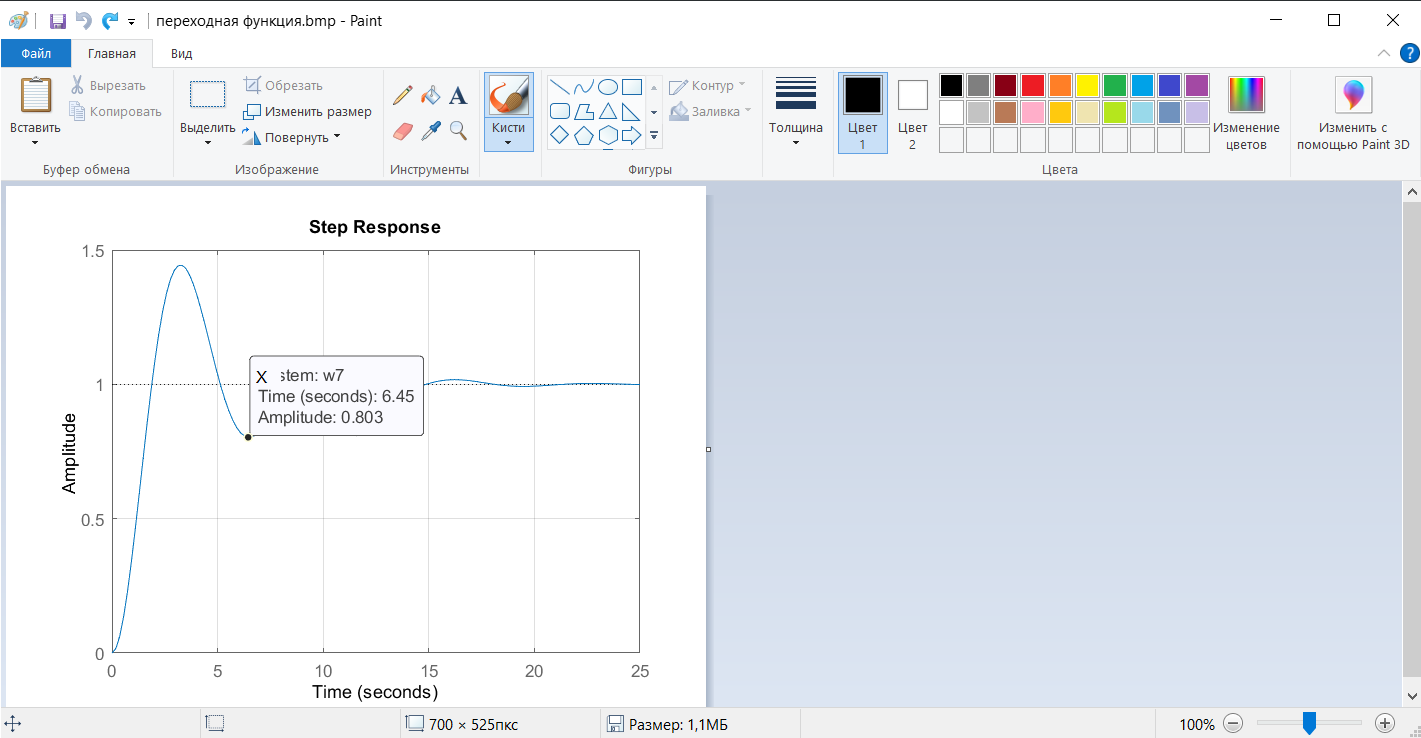
Определите для созданного ранее колебательного звена:
1) значения переходной функции в точке ее максимума и в точке первого минимума после наступления максимума, а также значения времени в этих точках;
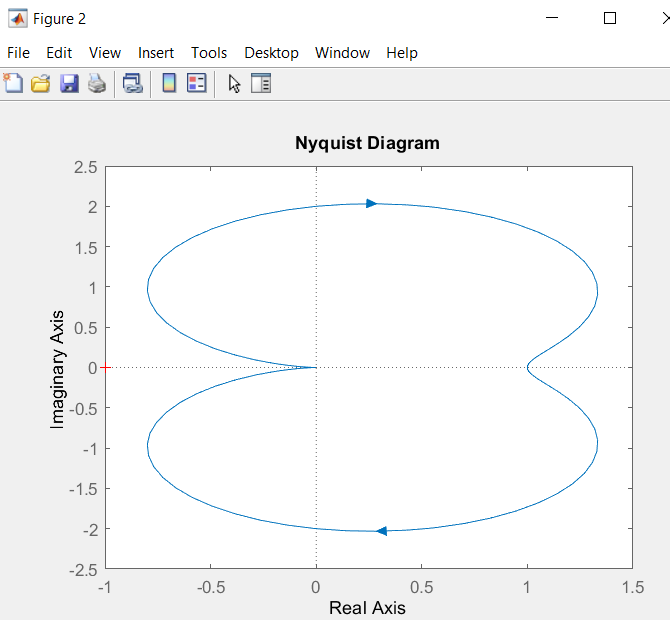
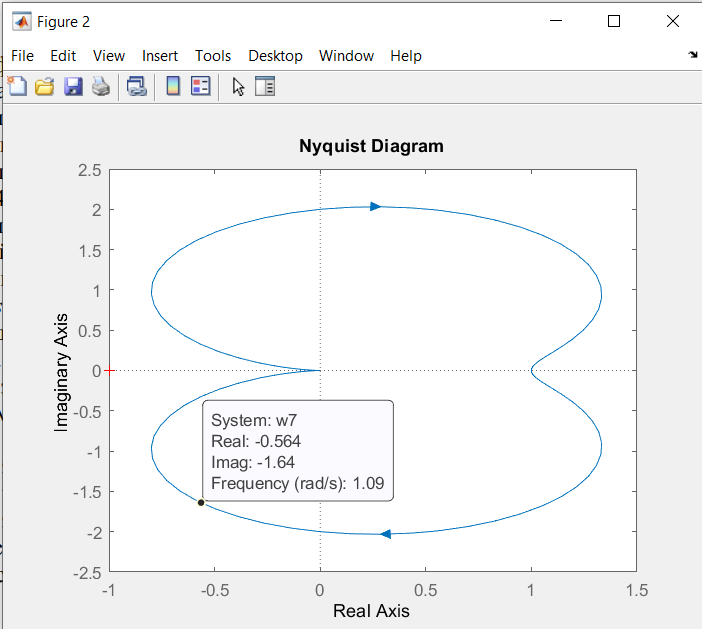
2) значения действительной и мнимой части АФЧХ на частоте 1.09 рад/с;
3) частоту, на которой ЛАЧХ имеет максимум;
4) значение ЛФЧХ на этой частоте.
Установите сетку на координатную плоскость и сохраните любую из характеристик в файле типа Bitmap. Откройте этот файл в редакторе Paint.
1)
2)
3)
4)
5)
Задание 8.
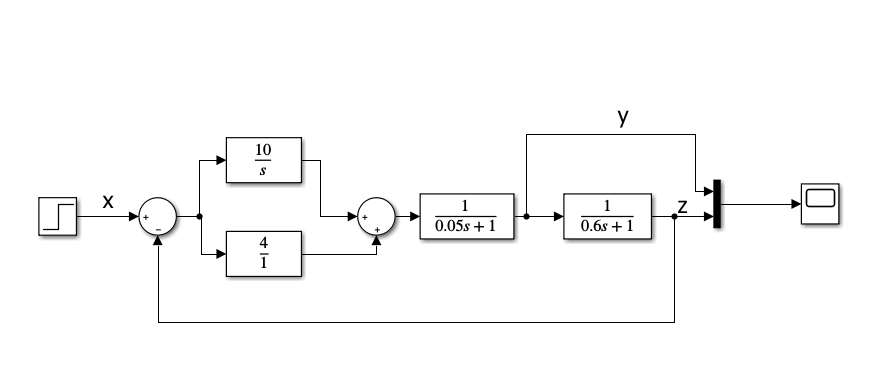
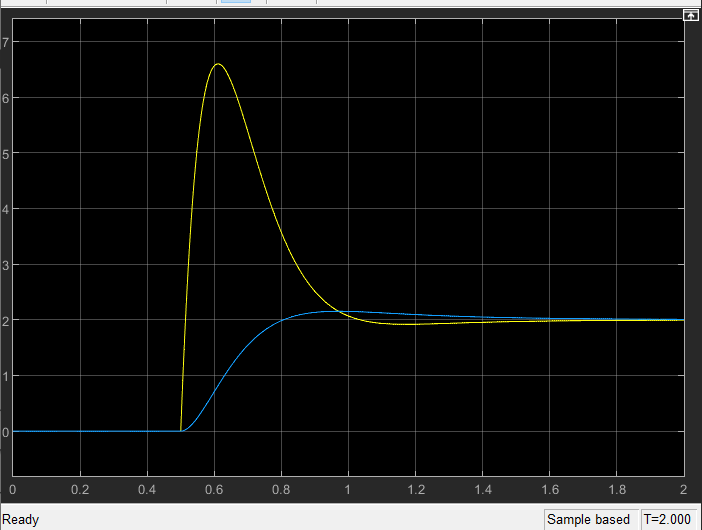
Создайте в окне Lab1Window модель системы, структурная схема которой показана на рис.1.17. Установите параметры задающего сигнала x, как показано на рис.18. Установите время моделирования 0…2 секунды и шаг расчета 0,002 с. Запустите моделирование и раскройте окно индикатора. Определите максимальные значения величин у и z. Сохраните файл модели. Закройте окно модели, а затем снова загрузите его из файла. Сохраните изображение модели в графическом файле.

Z=2.1524
Y=6.597
Вывод: в ходе выполнения данной лабораторной работы мне удалось получить начальные сведения о системе MATLAB и ее пакетах Simulink и Control System Toolbox и навыки работы с ними.