Файл: Курсовая работа по дисциплине Автоматизация в электромеханике.docx
Добавлен: 05.12.2023
Просмотров: 26
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Пермский национальный исследовательский политехнический университет» Кафедра электротехники и электромеханики
Курсовая работа
по дисциплине: «Автоматизация в электромеханике»
«Расчет системы автоматического управления двигателем постоянного тока независимого возбуждения»
Выполнил студент гр. ЭМ- 20-1б Шалабот С.С.
Проверил преподаватель Кавалеров Б.В.
Оценка
дата
Пермь 2023
Цель курсовой работы
Применить полученные на лекционных, практических и лабораторных занятиях, а также при выполнении самостоятельной подготовки и изучении дополнительной литературы знания, умения и навыки для расчета системы автоматического управления двигателем постоянного тока независимого возбуждения.
Задачи курсовой работы
-
Получить математическую модель двигателя постоянного тока (ДПТ)
на основании его номинальных данных и паспортных параметров.
-
Составить алгоритмическую структурную схему ДПТ. -
Получить передаточную функцию ДПТ по заданию и по возмущению. -
Получить математическую модель преобразователя. -
Рассчитать регулятор системы автоматического управления (САУ)
ДПТ.
-
Проанализировать показатели качества синтезированной САУ ДПТ. -
Выполнить программную реализацию и получить переходные
процессы
в системе визуального моделирования Matlab/Simulink(лицензия
№ 568405).
-
Проанализировать полученные результаты и сделать выводы.
Объект исследования
Система автоматического управления частотой вращения двигателя постоянного тока независимого возбуждения.
Предмет исследования
Математическая модель САУ частотой вращения ДПТ.
Номинальные данные и параметры двигателя 2ПН100МУХЛ4
Мощность – 3,6 кВт
Напряжение – 110 В
Номинальная частота вращения – 3150 об/мин
Максимальная частота вращения – 4000 об/мин
Коэффициент полезного действия – 78,5%
Сопротивление обмотки якоря при 15ᴼС – 0,084 Ом
Сопротивление обмотки добавочных полюсов при 15ᴼС – 0,089 Ом
Сопротивление обмотки возбуждения при 15ᴼС – 129 Ом
Индуктивность цепи якоря – 1 мГн
Момент инерции – 0,015 кг*м^2
Содержание курсовой работы
-
Получение математической модели двигателя постоянного тока (ДПТ) на основании его номинальных данных и паспортных параметров.-
Полное сопротивление якорной цепи:
-
 (Ом) (1)
(Ом) (1)где Ra– сопротивление обмотки якоря, RДП – сопротивление добавочных полюсов, RКО – сопротивление компенсационной обмотки.
-
Нагретое сопротивление якорной цепи:
 (Ом) (2)
(Ом) (2)где tхол = 15ºС, tгор = 90ºС.
-
Электромагнитная постоянная времени:
 =
=  (с) (3)
(с) (3) 1.4. Номинальный ток якоря двигателя:
 (А) (4)
(А) (4)1.5. Угловая скорость якоря двигателя номинальная:
 (рад/с) (5)
(рад/с) (5)1.6. Коэффициент ЭДС двигателя:
 (В·с) (6)
(В·с) (6)1.7. Угловая скорость якоря холостого хода:
 (рад/с) (7)
(рад/с) (7) 1.8. Номинальный вращающий момент двигателя:
 (Н·м) (8)
(Н·м) (8)1.9. Ток короткого замыкания двигателя:
 (А) (9)
(А) (9)1.10. Электромеханическая постоянная двигателя:
 (с) (10)
(с) (10)1.11. Номинальная ЭДС двигателя:
 (В) (11)
(В) (11)1.12. Момент короткого замыкания двигателя:
 (Нм) (12)
(Нм) (12)1.13. Механическая характеристика двигателя:
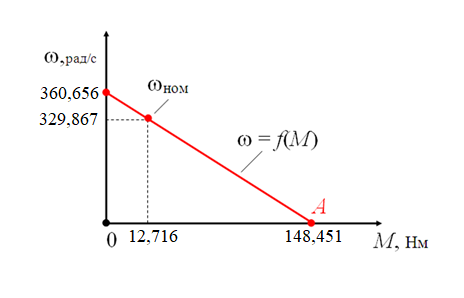
Рисунок 1 – Механическая характеристика двигателя
-
Составить алгоритмическую структурную схему ДПТ
-
Алгоритмическая структурная схема ДПТ
Рисунок 2 – Структурная схема ДПТ
-
Для того, чтобы иметь возможность явно измерять ток якоря, преобразуем эту структурную схему к преобразованному виду (рисунок 3).
Рисунок 3 – Структурная схема ДПТ
-
Получение передаточной функции ДПТ по заданию и по возмущению. Сначала получить в общем виде, потом подставить конкретные численные значения.
-
Передаточная функция ДПТ по заданию:
 . (13)
. (13)Подставив значения параметров:
-
Передаточная функция ДПТ по возмущению:
Подставив значения параметров:

-
Получение математической модели преобразователя.
Учитывая сильное влияние на тиристорный преобразователь (ТП) импульсных помех, на входе СИФУ устанавливают фильтр в виде апериодического звена с постоянной времени TФ = 0,003 – 0,005 с. В этом случае влияние дискретности и полууправляемости можно не учитывать.
Выпрямленная ЭДС тиристорного выпрямителя:
 , (15)
, (15)где g = 1 – нулевая схема, g = 2 – мостовая схема, E2 – действующее значение ЭДС вторичной обмотки.
Ed0 = 1,17 E2 – для нулевой схемы, Ed0 = 2,34 E2 – для мостовой схемы.
При моделировании параметры тиристорного преобразователя относят к эквивалентным параметрам системы ТП – ДПТ в виде суммы сопротивления якорной цепи двигателя и сопротивления ТП (рисунок 4):
 , (16)
, (16)аналогично для индуктивностей:
 , (17)
, (17)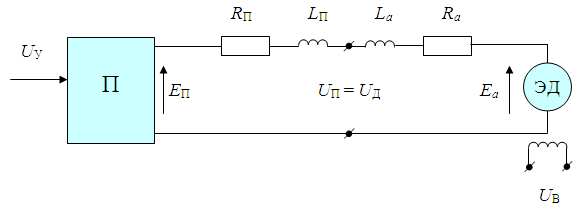
Рисунок 4 – Модель ДПТ и ТП
-
Рассчитать эквивалентные параметры системы ТП – ДПТ по формуле (18).

 (18)
(18)где Rв – сопротивление открытых вентилей (принять:
 ), Rщ – сопротивление пары щеток (для угольно-графитовых принять падение напряжения на пару щеток ΔUщ =2,0 В, тогда
), Rщ – сопротивление пары щеток (для угольно-графитовых принять падение напряжения на пару щеток ΔUщ =2,0 В, тогда  ), Rд, Lд – сопротивление и индуктивность дросселя, устанавливаемого для уменьшения пульсаций якорного тока при питании от тиристорных преобразователей, Rтр, Lтр – сопротивление и индуктивность трансформатора.
), Rд, Lд – сопротивление и индуктивность дросселя, устанавливаемого для уменьшения пульсаций якорного тока при питании от тиристорных преобразователей, Rтр, Lтр – сопротивление и индуктивность трансформатора.Принять Rтр = 0,254 Ом, Lтр = 0,00126 Гн ; Rд = 0,0068 Ом, Lд = 0,0015 Гн.
-
Пересчитать по формулам (19 – 28) эквивалентные параметры электромеханической системы с учетом ТП.-
Электромагнитная постоянная времени:
-
 (с) (19)
(с) (19)-
Номинальный ток якоря двигателя:
(А) (20)
-
Угловая скорость якоря двигателя номинальная:
 (рад/c) (21)
(рад/c) (21)-
Коэффициент ЭДС двигателя:
 (В с) (22)
(В с) (22)-
Угловая скорость якоря холостого хода:
 (рад/c) (23)
(рад/c) (23)-
Номинальный вращающий момент двигателя:
 (Н м) (24)
(Н м) (24)-
Ток короткого замыкания двигателя:
 (А) (25)
(А) (25)-
Электромеханическая постоянная двигателя:
 (с) (26)
(с) (26)-
Номинальная ЭДС двигателя:
 (В) (27)
(В) (27)-
Момент короткого замыкания двигателя:
 (Н м) (28)
(Н м) (28)-
Учесть момент инерции исполнительного механизма Jмех = 10 кг м2, при номинальной частоте вращения исполнительного механизма nмех = 150 об/мин.
 (19)
(19)где
 – приведенный момент инерции исполнительного механизма
– приведенный момент инерции исполнительного механизма (
 =10/212 , i =21 – передаточное число редуктора).
=10/212 , i =21 – передаточное число редуктора).Рассчитать электромеханическую постоянную времени (10) с учетом
 .
.-
Постоянную времени ТП с учетом фильтрации принять равной: Tп = 0,005 с.
Поэтому ТП учесть приближенно апериодическим звеном с постоянной времени Tп и коэффициентом усиления k = 48:
 (20)
(20)-
Аналогично (3.1) найти передаточные функции ДПТ с эквивалентными параметрами (с учетом параметров ТП) по заданию и по возмущению.


-
Расчет регулятора одноконтурной системы автоматического управления (САУ) ДПТ.