Файл: Курсовая работа по дисциплине Автоматизация в электромеханике.docx
Добавлен: 05.12.2023
Просмотров: 27
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Одноконтурные САР скорости (без применения контура тока) нашли некоторое применение в маломощных приводах постоянного тока. Для ограничения величины тока используют упреждающее токоограничение или отсечку по току.
В настоящее время применяются редко, хотя в микропроцессорных системах для повышения быстродействия возможно переключение с двухконтурных САР на одноконтурные.
-
Получить структурную схему САУ ДПТ (рисунок 5).
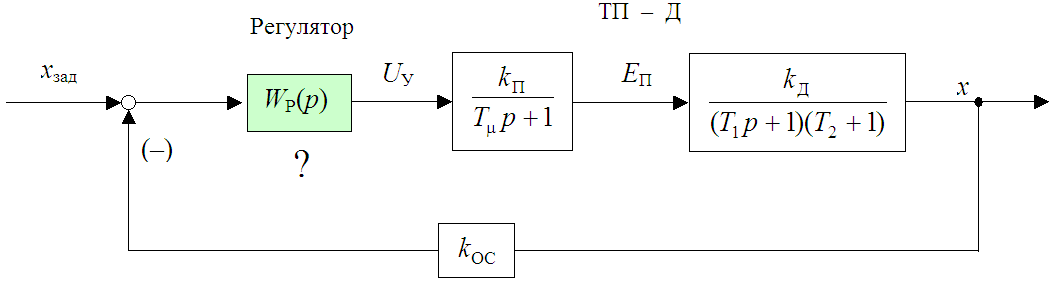
Рисунок 5 – САУ ДПТ
При этом для упрощения принять, что kОС = 1. Тиристрный преобразователь считать реверсивным.
-
Выполнить синтез регулятора для ДПТ с передаточной функцией следующего вида:

Найти регулятор:
а) если T1 >> T2 и T2 ≈ TТП – одного порядка, тогда выбирают Tμ =T2 + TТП=
= 0,005 + 0,002= 0,007
и выбирают ПИ-регулятор;
Параметры регуляторов определяют из соотношения:

(21)
Где

– желаемая передаточная функция разомкнутого контура (модульный оптимум).
-
Зарисовать структурную схему САУ ДПТ с рассчитанным регулятором.
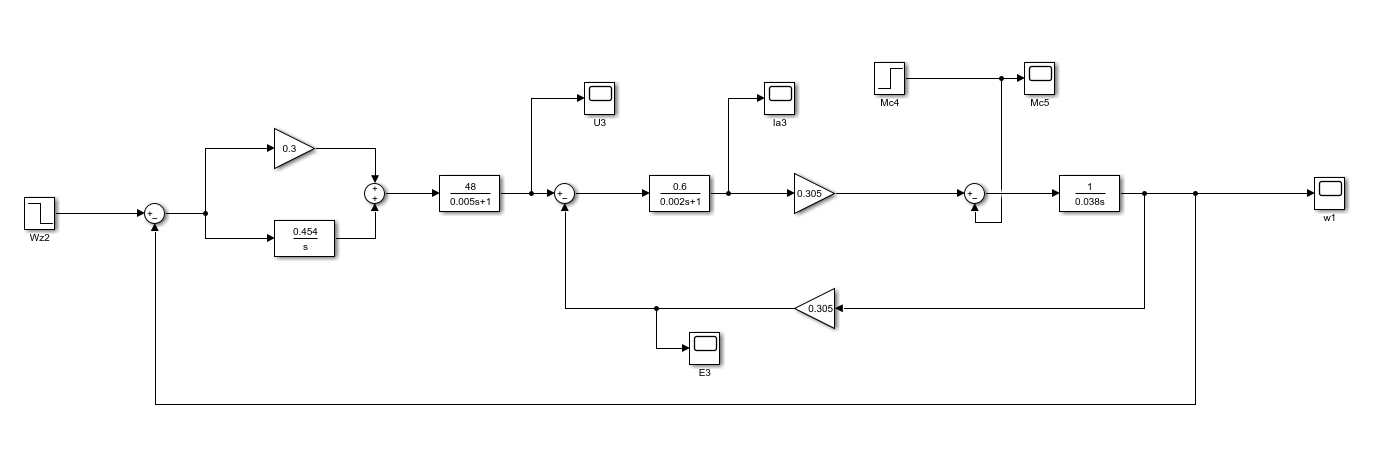
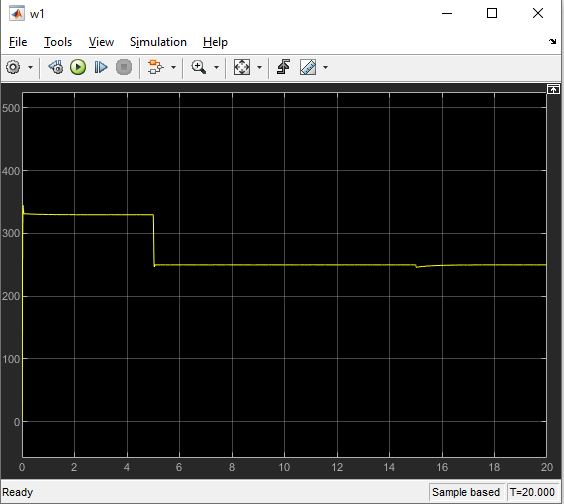
Рисунок 6 – САУ ДПТ с ПИ-регулятором, настроенным на МО
-
Проанализировать показатели качества синтезированной САУ ДПТ (с ПИ и ПИД-регуляторами).
-
Выполнить программную реализацию и получить переходные процессы в системе визуального моделирования Matlab/Simulink (лицензия № 568405).
Для ПИД-регулятора малая некомпенсированная постоянная времени равна:
Tμ = TТП = 0,005 с.
Параметры регуляторов определяют из соотношения:
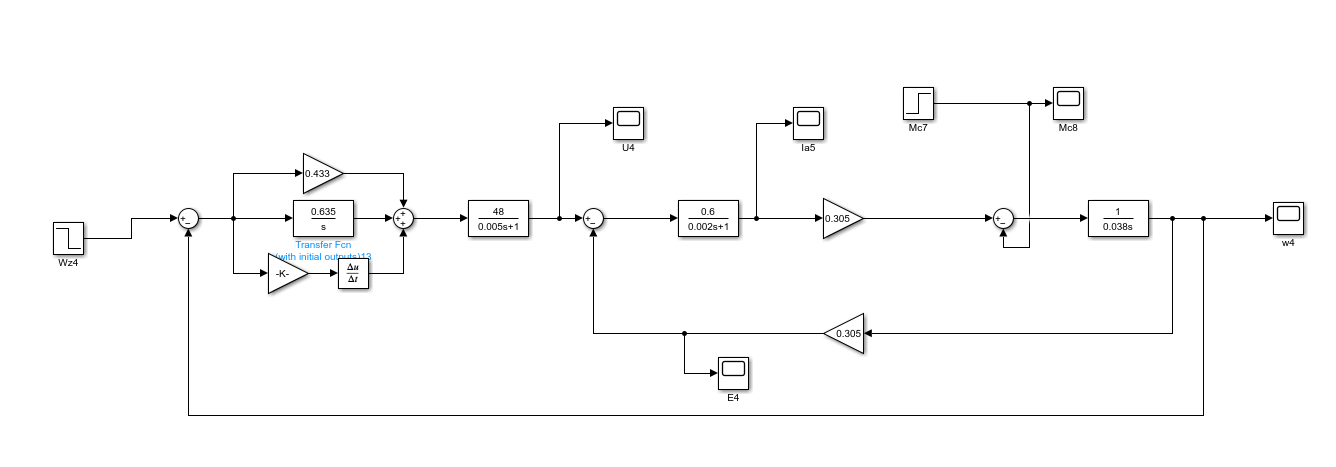
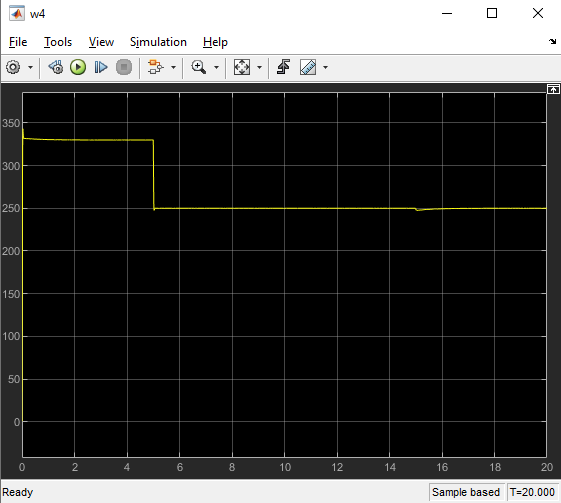
Рисунок 7 - САУ ДПТ с ПИД-регулятором
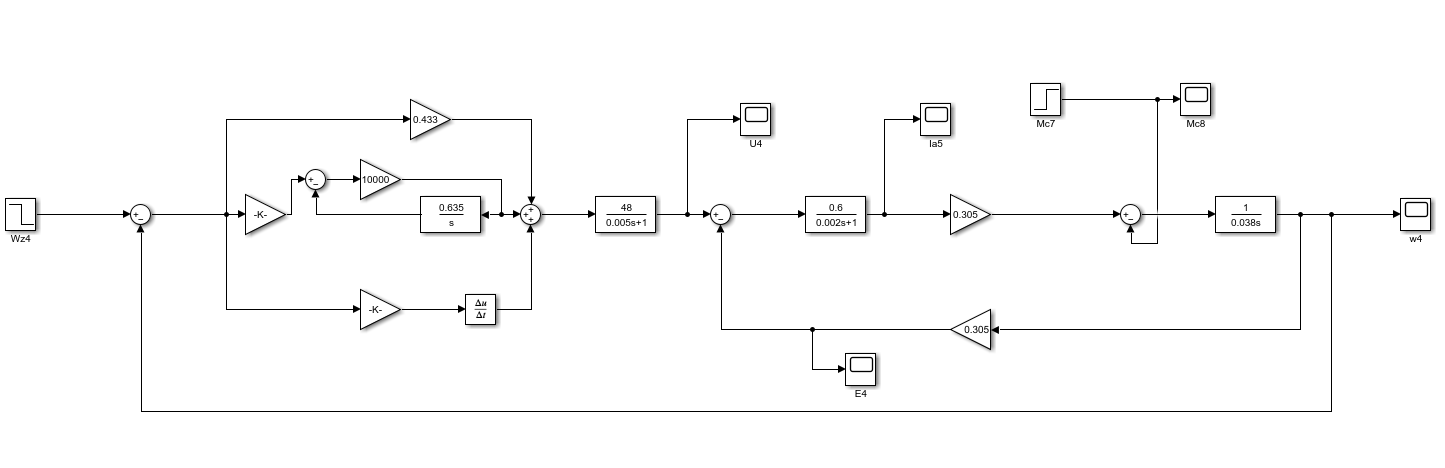
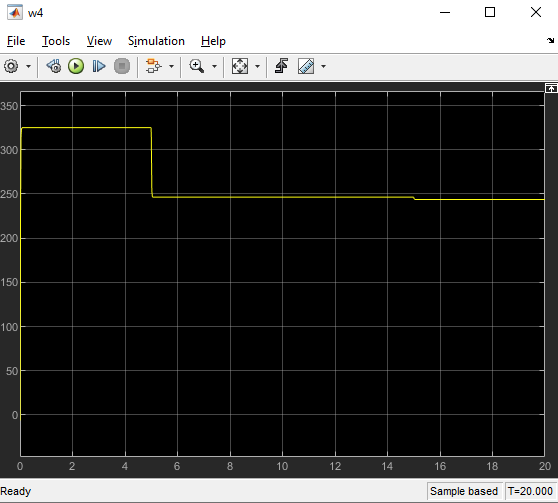
Рисунок 8 – САУ ДПТ с модифицированным ПИД-регулятором
-
Получить и нарисовать графики угловой скорости ДПТ, тока якоря, электромагнитного момента ДПТ при изменении сигнала задания (снижение угловой скорости ДПТ на 15-30 %) и при изменении сигнала возмущения (наброс нагрузки на ДПТ). Учесть, что тиристорный преобразователь принят реверсивным.
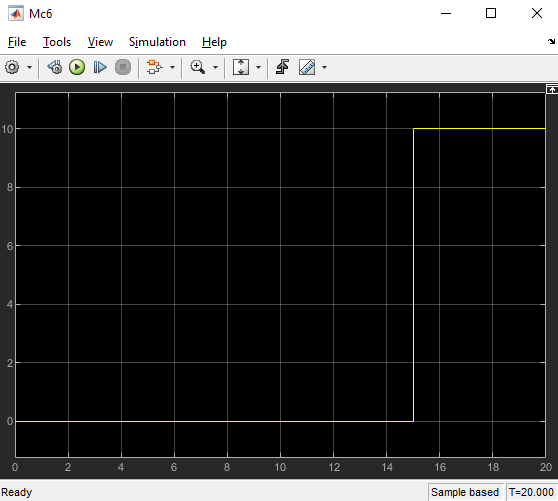
Рисунок 9 – график электромагнитного момента ДПТ с ПИ-регулятором
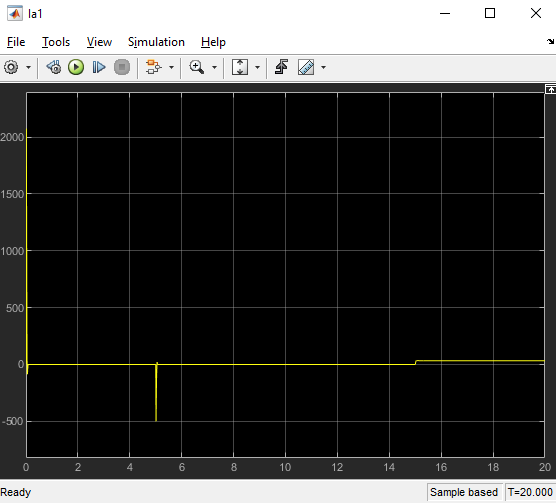
Рисунок 10 – график тока якоря ДПТ с ПИ-регулятором
Максимальный ток при переходном процессе превышает номинальный в 12 раз, поэтому при реализации необходимо ограничивать максимальный ток якоря (использовать токоограничительное реле).
Imax1=500,5 A, Iном=
 A
AПревышение: Imax/Iном=500,5/
=12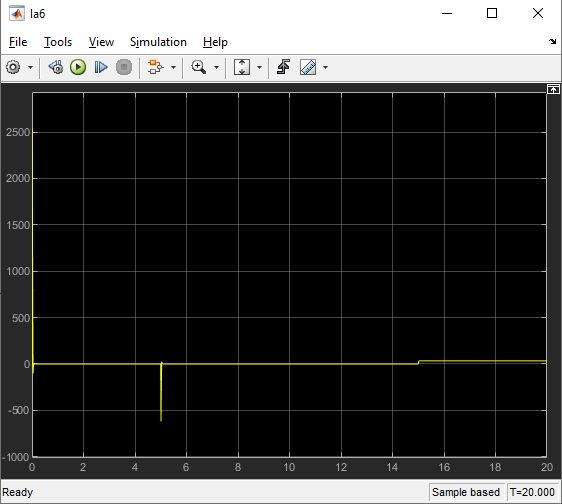
Imax2=619,5 A - максимальный ток при переходном процессе.
Максимальный ток при переходном процессе у ПИД-регулятора превышает в 1,24 раза максимальный ток при переходном процессе у ПИ-регулятора.
Превышение: Imax2/Imax1=619,5/500,5 =1,24
Imax1 - максимальный ток при переходном процессе у ПИ-регулятора
Imax2 - максимальный ток при переходном процессе у ПИД-регулятора
-
Сравнить полученные в п.6 показатели качества переходного процесса САУ (перерегулирование и время нарастания) с показателями настройки на модульный оптимум (σ = 4,3 %, tН = 4,7 Tµ).
σ =
1) У рассчитанного ПИ-регулятора: (Теор: tН = 4,7Tμ =0,0329 с.)
Перерегулирование:
σ =

, что меньше теоретического значения.
Время нарастания:
 c
c0,032/Tµ=0,0308/0,007=4,4
 , что меньше теоретического значения.
, что меньше теоретического значения.2)У рассчитанного ПИД-регулятора: (Теор: tН = 4,7Tμ =0,0235 с.)
Перерегулирование:
σ =
 , что меньше теоретического значения.
, что меньше теоретического значения.Время нарастания:
 c
c0,025/Tµ=0,025/0,005=5
 , что больше, чем теоретическое значение.
, что больше, чем теоретическое значение.3)У модифицированного ПИД-регулятора: (Теор: tН = 4,7Tμ =0,0235 с.)
Перерегулирование:
σ =
 , что больше теоретического значения, но максимально приближено к нему.
, что больше теоретического значения, но максимально приближено к нему.Время нарастания:
 c
c0,028/Tµ=0,028/0,005=5,6
 .
.6.4. Оценить возможное отличие полученных результатов моделирования и желаемого переходного процесса. Сделать выводы.
Наилучшее быстродействие у модифицированного ПИД-регулятора
 c (Теор: tН = 4,7Tμ =0,0235 с.)
c (Теор: tН = 4,7Tμ =0,0235 с.)Среднее быстродействие у рассчитанного ПИД-регулятора
 c (Теор: tН = 4,7Tμ =0,0235 с.)
c (Теор: tН = 4,7Tμ =0,0235 с.)Худшее быстродействие у ПИ-регулятора
 c c (Теор: tН = 4,7Tμ =0,04606 с.)
c c (Теор: tН = 4,7Tμ =0,04606 с.)У рассчитанного ПИД-регулятора время нарастания незначительно, но хуже теоретического, а именно в 1,06 раза. Теоретическое время нарастания tн=0,0235 с; значение, полученное в результате расчета tн1=0,025 с.
Превышение:
У модифицированного ПИД-регулятора перерегулирование практически совпадает с теоретическим значением:
Вывод: Я считаю, что улучшенный ПИД-регулятор является самым лучшим из рассчитанных регуляторов, т.к. он имеет самое лучшее перерегулирование, которое
максимально приближено к модульному оптимуму, но в отличие от обычного ПИД-регулятора имеет большее время нарастания, хоть и максимально приближенное к нему.