Файл: Лабораторная работа 2 Определение деформации балки при изгибе по курсу Механика 2 Тема Расчёт на жёсткость при прямом изгибе.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 74
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Лабораторная работа № 2
«Определение деформации балки при изгибе»
по курсу «Механика 2»
Тема 5.2. Расчёт на жёсткость при прямом изгибе
Цель работы: экспериментальная проверка интеграла Мора для определения линейных и угловых перемещений при изгибе балки.
Задачи работы
1. Экспериментально и теоретически (методом Мора) определить величину прогиба или угла поворота заданного сечения балки.
2. Сравнить полученные результаты и сделать выводы.
Порядок запуска виртуальной лабораторной работы (ВЛР)
1.1. Получите доступ к виртуальному рабочему столу. Инструкция по получению доступа прилагается к заданию в курсе.
1.2. Откройте на виртуальном рабочем столе папку Лабораторные работы, выберите папку Professional group, в ней запустите двойным щелчком программу Выполнить.
1.3. Одинарным щелчком выберите группу «Сопротивление материалов».
1.4. Из развернувшегося перечня выберите одинарным щелчком лабораторную работу «Определение деформации балки при изгибе».
1.5. По одинарному щелчку Вам будут доступны файлы ВЛР: Методические материалы и Виртуальная лаборатория (рис. 1).
Рис. 1. Файлы ВЛР
Для выхода из Методических материалов используется кнопка
Используйте сочетание клавиш Ctrl + Alt, чтобы курсор мыши имел возможность свернуть или уменьшить размер окна виртуального стола. Тогда вы сможете и работать на своем компьютере за пределами виртуального рабочего стола, и возвращаться обратно (рис. 2).
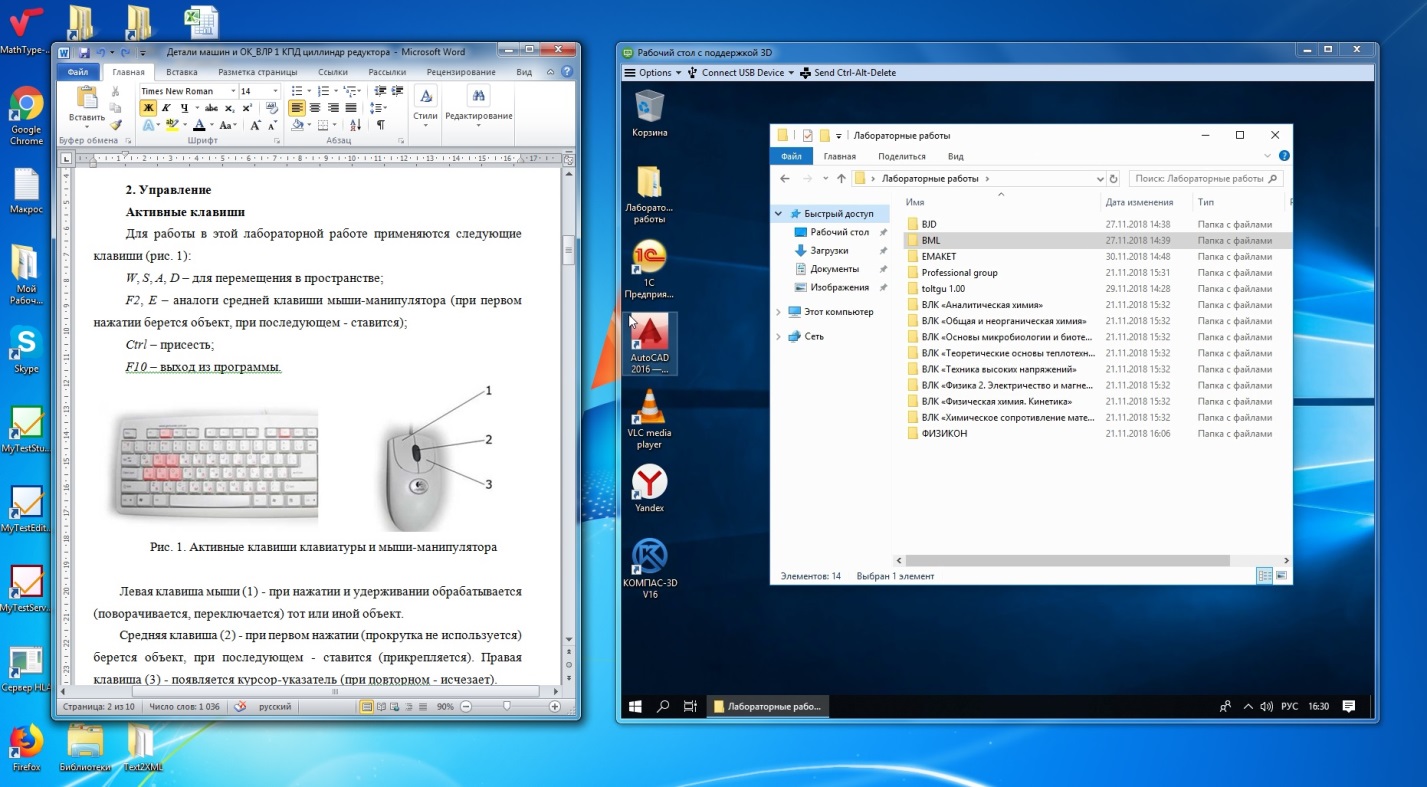
Рис.2. Личный рабочий стол и виртуальный
1. Материалы и оборудование
1.1. Активные клавиши
В этой лабораторной работе применяются следующие клавиши (рис. 3):
W, S, A, D – для перемещения в пространстве
;
F2, Е – аналоги средней кнопки мыши-манипулятора (при первом нажатии берется объект, при последующем – ставится);
Ctrl – присесть;
Z – увеличить;
F10 – выход из программы.

Рис. 3. Активные клавиши клавиатуры и мыши-манипулятора
Левая кнопка мыши (1) при нажатии и удерживании обрабатывает (поворачивает, переключает) тот или иной объект.
Средняя кнопка (2) при первом нажатии (без прокрутки) берет объект, при последующем – ставит (прикрепляет).
При нажатии правой кнопки мыши (3) появляется курсор-указатель (при повторном – исчезает).
Примечание: при появившемся курсоре невозможно перевести взгляд вверх и в стороны.
1.2. Оборудование и инструменты лабораторного стенда
На рис. 4 представлен общий вид лабораторного стенда.
Для проведения лабораторной работы используется следующее оборудование:
-
установка СМ-4А (рис. 5); -
комплект грузов массой 10 Н (рис. 6); -
стрелочный индикатор с опорой; -
линейка.
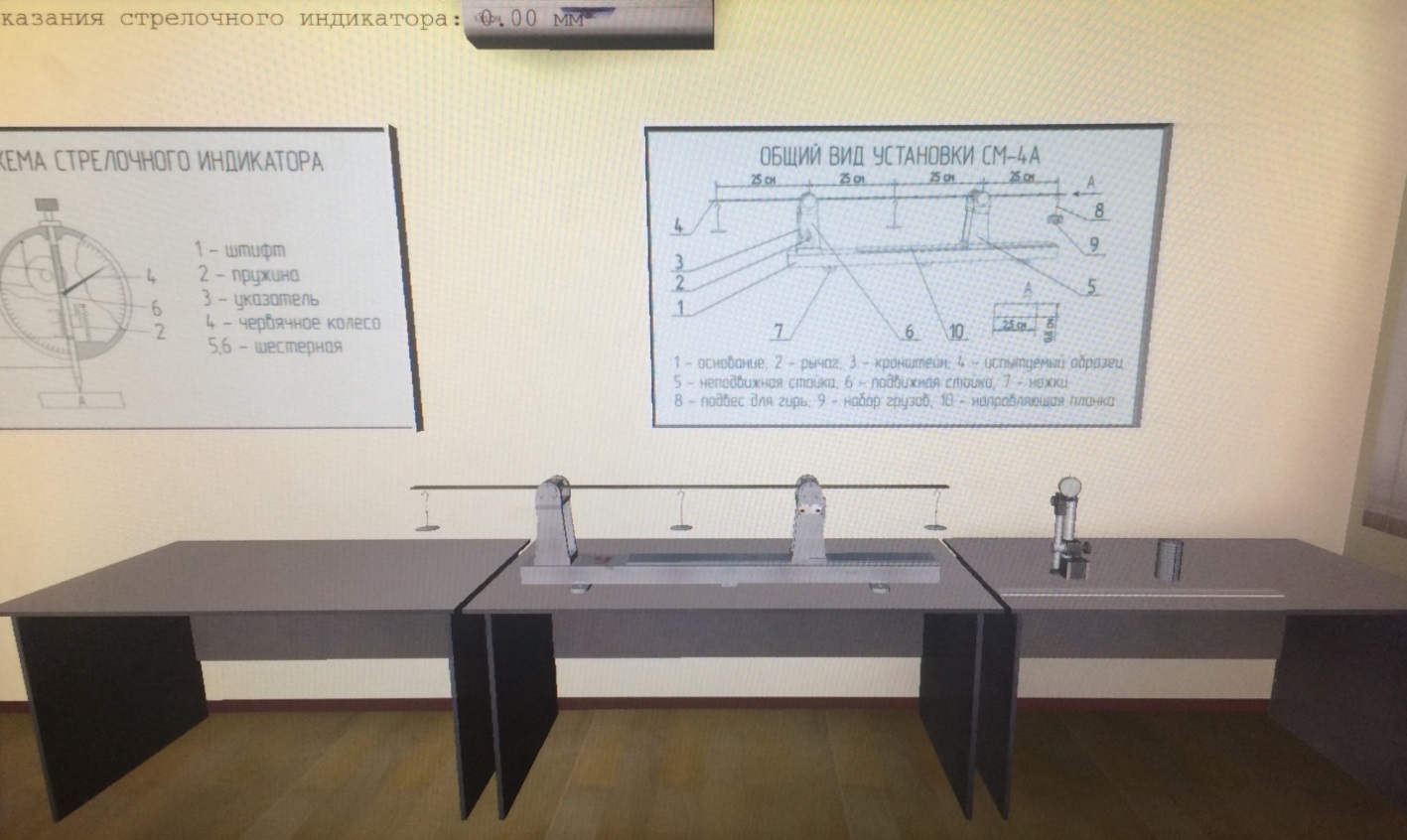
Рис. 4. Общий вид лабораторного стенда
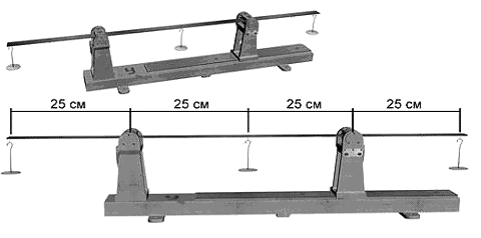
Рис. 5. Установка СМ-4А
Рис. 6. Комплект грузов
Для измерения перемещений используется стрелочный индикатор (рис. 7). До опыта индикатор устанавливается неподвижно, а острие его штифта (4) прижимается к точке тела, перемещение которой требуется определить. Во время опыта поступательное перемещение штифта через систему передач (червячную и зубчатые) преобразуется в поворот стрелок прибора. С помощью большой стрелки (1) можно по шкале (2) определить перемещение штифта в сотых долях миллиметра. Малый циферблат (3) используется для отсчета целых миллиметров.
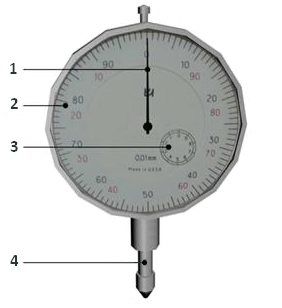
Рис. 7. Стрелочный индикатор
Черная разметка шкалы (2) применяется при движении штифта (4) снизу вверх (в этом случае стрелка (1) поворачивается по часовой стрелке), красная разметка – при движении штифта сверху вниз.
Лабораторная установка СМ-4А (рис. 8) представляет собой стальную балку прямоугольного поперечного сечения (1), которая установлена на двух опорах (3), закрепленных на станине (5). Нагружение осуществляется путем приложения грузов к подвескам (2). Измерение прогиба в интересующем нас месте выполняется с помощью индикатора (4), зафиксированного в штативе.
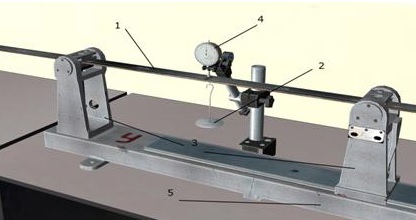
Рис. 8. Установка СМ-4А для определения перемещений при изгибе
2. Методические рекомендации
2.1. Изучите указанные ниже разделы файла Методические материалы виртуальной лабораторной работы:
– Введение;
– Теория. Общий метод определения перемещения, пригодный для любой линейно-деформируемой системы.
2.2. Определите номер варианта выполнения работы по первой букве Вашей фамилии в соответствии с таблицей 1.
Таблица 1
| Первая буква фамилии студента | Номер варианта | Первая буква фамилии студента | Номер варианта |
| А, Щ, Э, Я | 1 | З, Л, Ш, Ы | 7 |
| Б | 2 | К | 8 |
| В, Ж, Ф | 3 | М | 9 |
| Г, Ю | 4 | Н, Т | 10 |
| Д, Х, Ц, Ч | 5 | О, П, У | 11 |
| Е, Ё, И, Й, Р | 6 | С | 12 |
По номеру варианта выберите исходные данные из таблицы 2. Принятые обозначения нагрузок и перемещений показаны на рис. 9.
Таблица 2
| Номер варианта | Нагрузки, Н | Определяемое перемещение | ||
| F0 | F2 | F4 | ||
| 1 | – | 40 | – | f2 |
| 2 | 10 | 40 | – | f2 |
| 3 | 10 | 20 | 10 | f4 |
| 4 | 30 | – | – | f2 |
| 5 | 20 | – | 20 | f0 |
| 6 | 40 | 40 | 40 | f2 |
| 7 | – | 20 | – | f4 |
| 8 | – | 10 | 30 | f2 |
| 9 | 20 | 40 | 20 | f0 |
| 10 | – | – | 40 | f2 |
| 11 | 40 | – | 30 | f2 |
| 12 | – | 30 | – | θ1 |
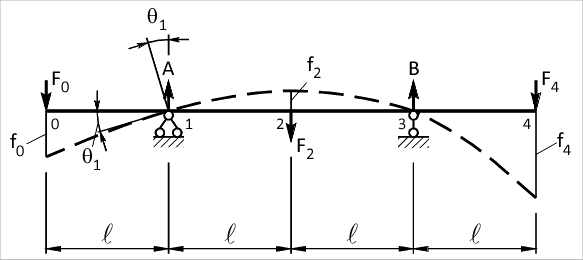
Рис. 9. Схема установки СМ-4А
2.3. Выполните все манипуляции и вычисления в соответствии с разделом 3 «Порядок выполнения работы».
2.4. Оформите отчет на Бланке выполнения лабораторной работы и прикрепите его в курс для проверки.
3. Порядок выполнения работы
3.1. Перед опытом занесите в Бланк выполнения работы схему нагружения балки, размеры длин участков l и поперечного сечения b и h; укажите место расположения индикатора.
Необходимые размеры приведены в программе виртуальной лаборатории на правом плакате (рис. 4). Длины участков также можно измерить линейкой (рис. 10).
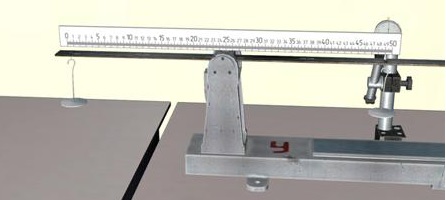
Рис. 10. Линейка, установленная на балке
3.2. Для выполнения опыта запустите файл Виртуальная лаборатория.
3.2.1. Установите стойку со стрелочным индикатором в месте, заданном вариантом выполнения работы. Для определения угла поворота в левой опоре (вариант 12) индикатор устанавливается на левом краю балки.
3.2.2. Положите на подвески грузы в соответствии с вариантом.
3.2.3. Определите показание стрелочного индикатора и запишите его в протокол.
Угол поворота в левой опоре можно определить, зная перемещение левого конца балки f0 и длину консоли l. В силу малости угла θ1 его тангенс примерно равен самому углу, выраженному в радианах:
 . (1)
. (1)3.3.Теоретический расчёт перемещений
3.3.1. Постройте эпюру изгибающих моментов от действия внешних сил (грузовая эпюра MF).
3.3.2. Покажите единичное состояние балки, приложив к ней безразмерную единичную силу (или безразмерный единичный момент) по направлению искомого перемещения. Постройте соответствующую этому состоянию эпюру изгибающих моментов (единичная эпюра M1).
3.3.3. Запишите выражение для искомого перемещения через интеграл Мора или используя формулу Симпсона для вычисления интеграла:
 , (2)
, (2)где верхние индексы н, с
и к используются для обозначения ординат эпюр M1 и MF, вычисленных соответственно в начале, середине и конце рассматриваемого участка интегрирования длиной l (направление обхода произвольно). Знак перемножения значений M1 и MF, лежащих по одну стороны базы эпюры, принимается положительным, в противном случае – отрицательным.
Величину модуля упругости E примите равной 2·105 МПа. Момент инерции сечения J определите путем подсчета.
3.4. Сравните результаты эксперимента и расчета, определив относительное расхождение опытных и расчетных результатов в процентах по формуле:
 (3)
(3)или
 (4)
(4)3.5. Сделайте вывод о применимости метода Мора для расчета перемещений при изгибе балок.