Файл: 1. 1 Краткая характеристика ленточного транспортёра и его технологического процесса.docx
Добавлен: 06.12.2023
Просмотров: 41
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Содержание
| Введение……………………………………………………………………………. | 3 | |
| 1. Общая часть | | |
| 1.1 Краткая характеристика ленточного транспортёра и его технологического процесса……………………………………………………...................................... | 4 | |
| 2. Расчетно-конструкторская часть | | |
| 2.1 Расчет и выбор электрического привода ленточного транспортёра……....... | 5 | |
| 2.2 Расчет и выбор аппаратуры защиты в щите управления ленточного транспортёра ……………………………………………………………………….. | 10 | |
| 2.3 Расчет и выбор аппаратуры управления электрическим приводом ленточного транспортёра………………………………………………………........................... | 11 | |
| 2.4 Разработка структурной схемы технологического процесса ленточного транспортёра…………………………………………………………....................... | 12 | |
| 2.5 Разработка технического задания на разработку автоматизации электрического привода ленточного транспортёра …………………………....... | 14 | |
| 2.6 Сравнение и выбор технологий и способа автоматизации электрического привода ленточного транспортёра………………………………………………………………………... | 15 | |
| 2.7 Выбор программируемого реле из семейства Owen………………………………………………………………………………… | 16 | |
| 2.8 Разработка принципиальной электрической схемы управления электрического привода ленточного транспортёра с использованием программируемого реле семейства Owen………………………………………………………………………………… | 17 | |
| 2.9 Разработка структуры программы управления электрическим приводом ленточного транспортёра с применением программируемого реле семейства Owen………………………………………………………………………………… | 17 | |
| 2.10 Программирование технологического процесса ленточного транспортёра с применением программируемого реле семейства Owen………………………………………………………………………………… | 18 | |
| Заключение…………………………………………………………………………. | 19 | |
| Литература………………………………………………………………………….. | 20 | |
Введение
Работу современных промышленных предприятий без использования конвейеров смодулировать очень трудно – конвейерные линии позволяют оптимизировать производственный процесс и сделать его более эффективным.
Ленточный конвейер – транспортирующее устройство непрерывного действия. Ленточные конвейеры являются наиболее распространенным типом машин конвейерного транспорта. Практически во всех отраслях промышленности используются ленточные конвейеры, которые обеспечивают непрерывность процессов транспортировки различных видов грузов и материалов. Из всего парка конвейерных установок около 90 % составляют ленточные конвейеры. Преимущество ленточных конвейеров перед другими способами транспортировки заключается в том, что благодаря значительной скорости движения ленты обеспечивается высокая эффективность и производительность технологических процессов, в малом потреблении энергии, простоте, надежности и долговечности конструкции устройства.
Для машин непрерывного действия характерно перемещение насыпных или штучных грузов по заданной трассе без остановок. Транспортирующие машины отличаются высокой надежностью, удобством эксплуатации и обслуживания, имеют большую длину транспортирования, работают в автоматическом режиме в комплексе с технологическим оборудованием, обеспечивают высокую производительность благодаря непрерывности процесса транспортирования.
Цель: разработать и защитить проект электрического привода ленточного транспортёра.
Задача: рассчитать электрический привод ленточного транспортёра, запрограммировать технологический процесс ленточного транспортёра с применением программируемого реле семейства Owen.
1 Общая часть
-
Краткая характеристика ленточного транспортёра и его технологического процесса
Основными элементами конвейера данной схемы являются: приводной барабан (1), расположенный на приводной станции вместе с электродвигателем, редукторами и отклоняющей системой, натяжной барабан 2, расположенный в хвостовой части вместе с натяжным устройством с грузом нц 6, тяговая (грузонесущая) лента 3, роликовые опоры 4, отклоняющий барабан 5.
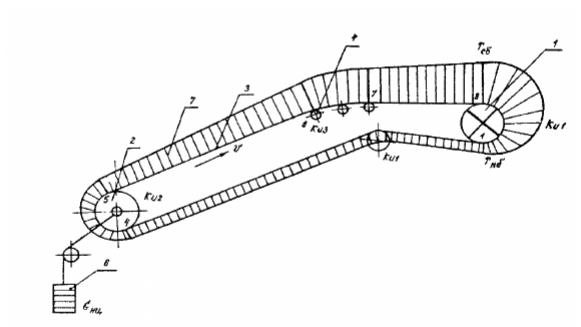
Рисунок 1 «Схема ленточного транспортёра»
В ходе работы конвейерного оборудования перемещаемый груз транспортируется по верхней части ленты. Она вертикально замкнута, закреплена и поддерживается специальными роликоопорами. Приводной барабан задает темп движения конвейерной ленты. Натяжение транспортерной ленты регулирует натяжной барабан.
Для загрузки грузов на конвейерную ленту используют загрузочные агрегаты. Конечная выгрузка производится в приемное устройство. Возможна также промежуточная выгрузка по трассе конвейера. Она осуществляется барабанными или плужковыми разгружателями.
Для очистки конвейерной ленты от прилипшей грязи, пыли используют специальные очистные устройства.
2. Расчетно-конструкторская часть
2.1 Расчет и выбор электрического привода ленточного транспортёра
| Наименование параметра | Условное обозначение | Единица измерения | Вариант |
| 3 | |||
| Производительность | Q | т/час | 65 |
| Операция | - | - | подъем |
| Длина ленты | L | М | 65 |
| Ширина ленты | B | М | 1,0 |
| Скорость перемещения груза | v | м/с | 1,1 |
| Высота подъема (опускания) | H | М | 9 |
| Диаметр барабана («звездочки») | D | М | 0,45 |
| Передаточное число редуктора | ip | - | 32 |
| Напряжение питания 3-фазной сети | Vc | В | 380 |
Определим (
 , м)-длина транспортёра (Расстояние между центрами ведущего и ведомого барабана).
, м)-длина транспортёра (Расстояние между центрами ведущего и ведомого барабана).
 (1)
(1)где
 -длина ленты конвейера, м;
-длина ленты конвейера, м; -диаметр барабана, м.
-диаметр барабана, м.
Определяем угол наклона транспортёра (
 ) к горизонту.
) к горизонту. (2)
(2)где
 -высота подъёма груза, м.
-высота подъёма груза, м.
 (3)
(3)где
 -горизонтальная проекция конвейера, м
-горизонтальная проекция конвейера, м 27,07м
27,07м (4)
(4)где
 -ширина ленты, мм.
-ширина ленты, мм. -коэффициент трения ленты об опоры, отн. ед;
-коэффициент трения ленты об опоры, отн. ед;
 (5)
(5)где
 -производительность транспортёра, т/ч;
-производительность транспортёра, т/ч;  -мощность подъёма груза, кВт;
-мощность подъёма груза, кВт;
 (6)
(6)где
 -мощность перемещения груза, кВт;
-мощность перемещения груза, кВт;
 (7)
(7) где
 -мощность потерь ленты при движении, кВт;
-мощность потерь ленты при движении, кВт;  -линейная скорость движения ленты, м/c;
-линейная скорость движения ленты, м/c;
 (8)
(8)где

-коэффициент дополнительных потерь, отн. ед;

Определим расчётную мощность АД транспортёра.
 (9)
(9)где,
 -коэффициент запаса, отн. ед;
-коэффициент запаса, отн. ед; -мощность транспортёра, кВт;
-мощность транспортёра, кВт; -КПД передачи, отн. ед.;
-КПД передачи, отн. ед.;
 (10)
(10)
Определим синхронную скорость (
 ) приводного АД.
) приводного АД. (11)
(11)где
 -синхронная расчётная скорость АД, об/мин:
-синхронная расчётная скорость АД, об/мин: -передаточное число применяемой передачи.
-передаточное число применяемой передачи.
По шкале синхронных скоростей применяем
=1500об/мин.По таблице мощностей при
=1500об/мин и  согласно условию
согласно условию  выбираем АД общепромышленного назначения т. АИР112М4
выбираем АД общепромышленного назначения т. АИР112М4 








