Файл: 1. 1 Краткая характеристика ленточного транспортёра и его технологического процесса.docx
Добавлен: 06.12.2023
Просмотров: 43
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Системы контакторного управления в главных цепях широко применяются для электроприводов кратковременного и продолжительного режимов.
Достоинства:
а) относительно малая стоимость средств управления;
б) простая надежная аппаратура, большой выбор аппаратуры;
в) при редких пусках и реверсах достаточное быстродействие (измеряется десятыми долями секунды);
г) простота устройств защиты, малая вероятность возникновения аварийного состояния;
д) не требуется высокой квалификации обслуживающего персонала.
Недостатки:
а) неэкономичность при частых пусках;
б) малая жесткость рабочих характеристик при пониженных скоростях;
в) громоздкость аппаратуры, необходимость постоянного ухода за аппаратурой с заменой или ревизией деталей;
г) система неприемлема при большом числе включений вследствие недостаточного быстродействия аппаратуры постоянного тока (время включения контактора 0,12—0,35 сек), перегрева катушек аппаратов переменного тока (кратность пускового тока Iп/Iуст = 10: 18), повышенного нагрева машин из-за толчков тока, быстрого износа аппаратуры и механизмов;
д) практически неприемлема при необходимости автоматического поддержания заданной скорости и изменения скорости в пределах более чем 1:3.
Под термином «релейно-контакторные системы управления» (РКСУ) понимают логические системы управления, построенные на релейно-контакторной элементной базе и предназначенные для автоматизации работы двигателей. С помощью РКСУ автоматизируют следующие операции: включение и отключение двигателя; выбор направления и скорости вращения; пуск и торможение двигателя; создание временных пауз в движении; защитное отключение двигателя и остановка механизма. Данные операции необходимы для выполнения движения рабочего органа механизма по технологическим условиям.
Непосредственный объект управления для РКСУ — это двигатель, питаемый от сети. Электропривод, выполненный на такой основе, представляет собой простой нерегулируемый электропривод, в основном общепромышленного применения (например, электропривод кранов, тихоходных лифтов, конвейеров, компрессоров, вентиляторов, насосов, некоторых транспортных устройств и т. п.).
Достоинства РКСУ - наличие гальванической развязки цепей; значительная коммутационная мощность; высокая помехоустойчивость; возможность использования единого источника питания для силовых и управляющих цепей. Недостатки РКСУ - контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление.
Рассматривая преимущества программируемых реле, разумно выбрать именно его.
2.7 Выбор программируемого реле из семейства Owen
Структурная схема технологического процесса ленточного транспортёра, удобства стандартного питания 230В, наличия достаточных входов/выходов для полноценной работы программы, удобства монтажа в щите управления и возможности последующей доработки программы, мною было выбрано программируемое реле из семейства Owen: ПР200-220.25.2.0
2.8 Разработка принципиальной электрической схемы управления электрического привода ленточного транспортёра с использованием программируемого реле семейства Owen
Электрический привод ленточного транспортёра из АД: АИР112М4. Устройством защиты управляющей части схемы является автоматический выключатель: ARMAT M06N 1P C 1,6А
Устройством защиты силовой части схемы является автоматический выключатель: ARMAT M06N 3P C 13А
При нажатии кнопки SB1 катушки контакторов КМ1 и КМ2 получают питание тем самым замыкая свои силовые контакты, после чего двигатель М1 и М2 вступают в работу. При нажатии кнопки SB2 цепи катушек контакторов размыкаются и двигатели останавливаются.
2.9 Разработка структуры программы управления электрическим приводом с применением программируемого реле семейства Owen
Программа написана так, что при поступлении логической «1» через CLOCK1-CLOCK4 или SB1 приходит питание сначала на звонок HA, который работает 2 секунды после на катушку контактора КМ2 тем самым двигатель М2 начинает работу, и после выдержки времени 8 секунд приходит питание на катушку контактора КМ1, и двигатель М1 тоже вступает в работу. Двигатели М1 и М2 работают с остановками, время движения транспортёра 3 секунды, время остановки 5 секунд.
За остановку двигателя отвечают CLOCK1-CLOCK4 или SB2. При достижении реального времени 10:00-10:15, 12:15-13:15, 15:15-15:30, 17:30-8:00, и при нажатии кнопки SB2 питание с катушек контакторов пропадает, контакты отключаются.
2.10 Программирование технологического процесса ленточного транспортёра с применением программируемого реле семейства Owen
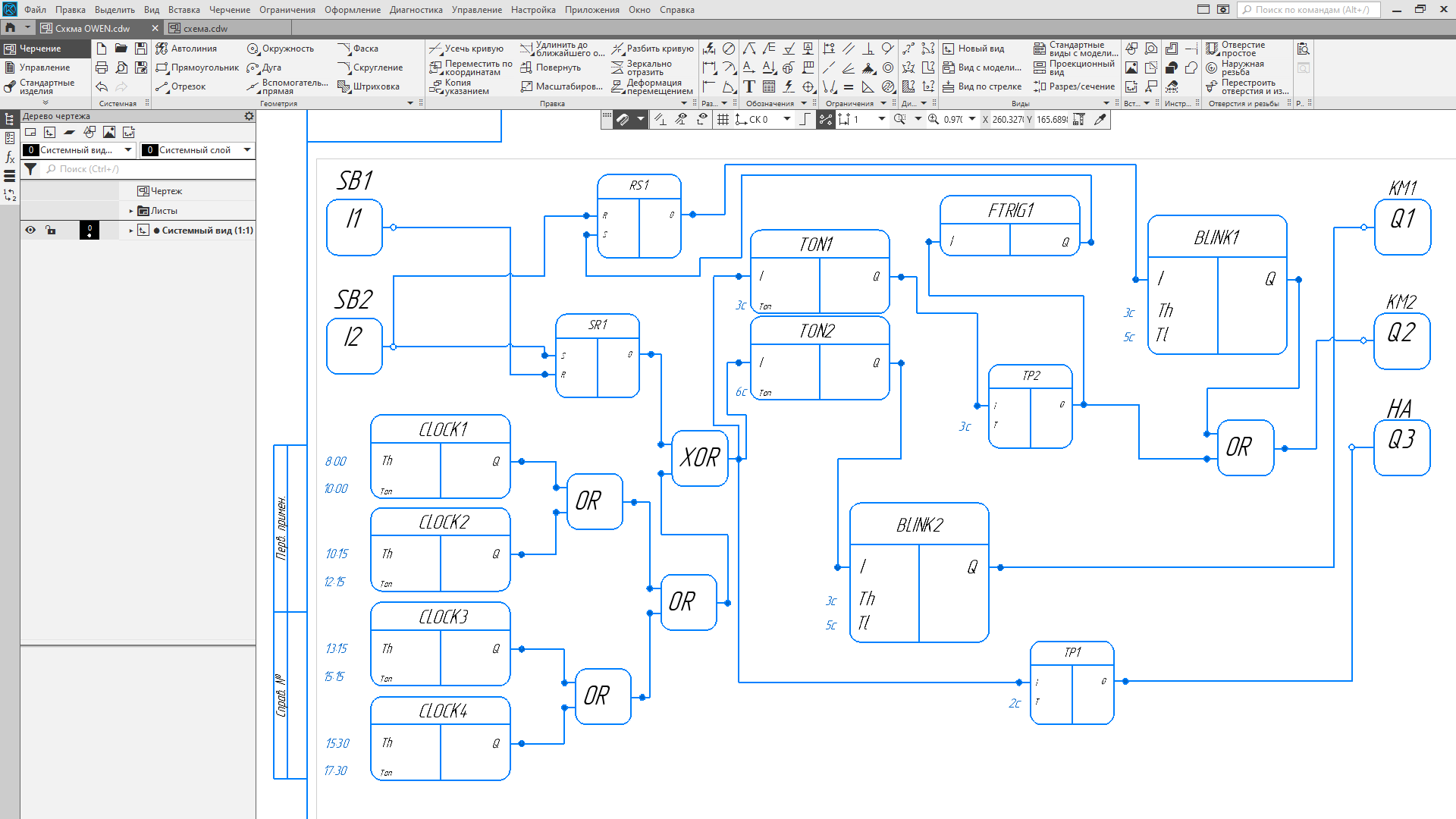
Рисунок 3 «Программа автоматизации пассажирского лифта»
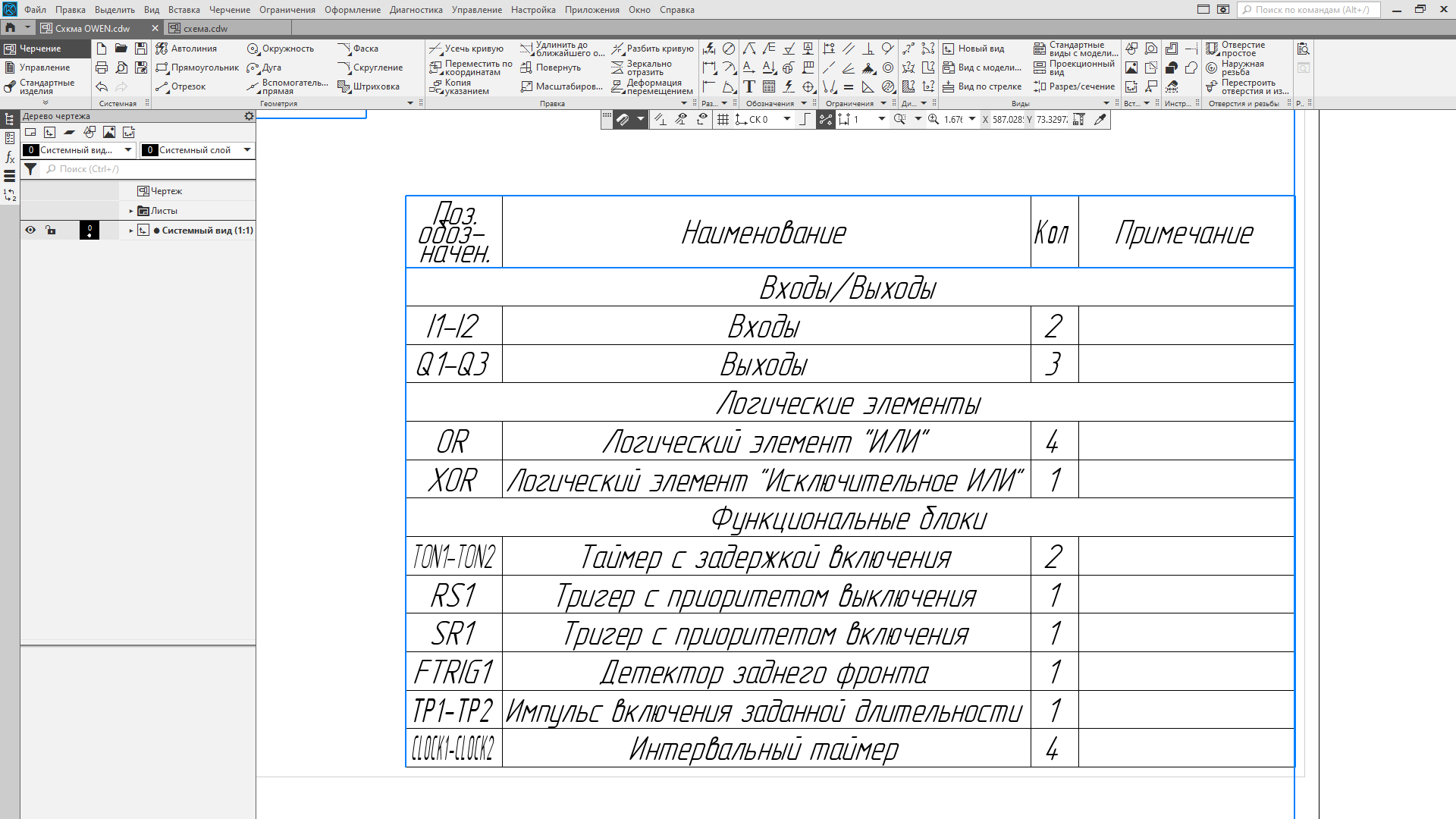
Таблица 2 «Составные части программы автоматизации ленточного транспортёра»
Заключение
Для курсового проектирования мне была выдана работа на тему «Электрический привод ленточного транспортёра».
Чтобы раскрыть эту тему были поставлены следующие задачи и цели:
1. рассчитать электрический привод ленточного транспортёра
2. запрограммировать технологический процесс ленточного транспортёра с применением программируемого реле семейства Owen.
В ходе выполнения курсового проектирования мною был рассчитан электрический привод ленточного транспортёра. Были рассчитаны и выбраны устройства защиты силовой и управляющей части схемы. Разработана принципиальная электрическая схема управления ЭП ленточного транспортёра. Так же мною было выбрано программируемое реле, с помощью которого осуществлена автоматизация привода установки. Разработана программа управления электрическим приводом ленточного транспортёра в программе Owen Logic.
Все цели и задачи, поставленные передо мной в начале курсового проектирования выполнены в полном объеме.
Литература
-
Иванов Д.В. Электронный научный журнал. ЕРИЯ: естественные и технические науки №3 -
В.П. Дьяченко Режим работы привода ленточного конвейера при случайном грузопотоке -
Алиев, И.И. Электротехника и электрооборудование. Справочник. / И.И. Алиев. - М.: Высшая школа, 2010. - 1199 c. -
Курбанов, С.А. Основы электропривода: Учебное пособие / С.А. Курбанов, Д.С. Магомедова. - СПб.: Лань П, 2016. - 192 c. -
Неменко, А.В. Механические компоненты электропривода машин: расчет и проектирование: Учебное пособие / А.В. Неменко. - М.: Вузовский учебник, 2017. - 80 c. -
Шеховцов В.П. Аппараты защиты в электрических сетях низкого напряжения:Учебн.пособие. Год издания 2010 Издательство ФОРУМ. -
Шеховцов В.П. Электрическое и электромеханическое оборудование:Учебник. Год издания 2009 Издательство ФОРУМ: ИНФРА-М. -
Онищенко, Г.Б. Теория электропривода: Учебник / Г.Б. Онищенко. - М.: Инфра-М, 2018. - 384 c. -
Анчарова, Т.В. Электроснабжение и электрооборудование зданий и сооружений / Т.В. Анчарова, Е.Д. Стебунова, М.А. Рашевская. - Вологда: Инфра-Инженерия, 2016. - 416 c. -
Анчарова, Т.В. Электроснабжение и электрооборудование зданий и сооружений: Учебник / Т.В. Анчарова, М.А. Рашевская, Е.Д. Стебунова. - М.: Форум, 2018. - 192 c. -
Анчарова, Т.В. Электроснабжение и электрооборудование.: Учебник / Т.В. Анчарова, М.А. Рашевская, Е.Д. Стебунова. - М.: Форум, 2015. - 48 c. -
Гайдукевич, В.И. Электрооборудование индивидуального дома: Уч. Пособие / В.И. Гайдукевич. - М.: АСВ, 2001. - 64 c. -
Киреева, Э.А. Электроснабжение и электрооборудование цехов промышленных предприятий / Э.А. Киреева. - М.: КноРус, 2013. - 368 c. -
Киреева, Э.А. Электроснабжение и электрооборудование организаций и учреждений (для бакалавров). Учебное пособие / Э.А. Киреева. - М.: КноРус, 2017. - 272 c. -
Киреева, Э.А. Электроснабжение и электрооборудование цехов промышленных предприятий (для бакалавров) / Э.А. Киреева. - М.: КноРус, 2015. - 192 c. -
Коломиец, А.П. Электропривод и электрооборудование: Учебник для ВУЗов / А.П. Коломиец, Н.П. Кондратьева и др. - М.: КолосС, 2007. - 328 c. -
Коннов, А.А. Электрооборудование жилых зданий / А.А. Коннов. - М.: Додэка XXI, 2010. - 254 c. -
Рождествина, А.А. Электроснабжение и электрооборудование цехов промышленных предприятий (для бакалавров) / А.А. Рождествина. - М.: КноРус, 2013. - 368 c.