Файл: 21 3 Типовые логические элементы И, или,НЕ, ине, илине. Составить схему блока логики, реализующую логическую функцию вида P ( abc). Логическая функция НЕ.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 36
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
21
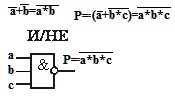
2.3 Типовые логические элементы И, ИЛИ,НЕ, ИНЕ, ИЛИНЕ. Составить схему блока логики, реализующую логическую функцию вида P= ( a+bc).
Логическая функция «НЕ» (логическое отрицание, инверсия). В устной форме она звучит так: событие P произойдет, если не произойдет событие а, и наоборот. Ее запись имеет вид Р=͞а.
Элемент НЕ. Если входного сигнала нет, то транзистор закрыт, коллекторного тока нет, нет падения напряжения н Rк, следовательно, на входе сигнал близок к напряжению падения; если подан вхдной сигнал (напряжение питания), то транзистор открывается, переходит в режим насыщения, сигнал н входе равен нулю.
Логическая функция «ИЛИ» (логическое сложение). Событие произойдет, если произойдет или одно событие, или второе, или оба вместе. Ее математическая запись имеет вид: P=a+b
Элемент ИЛИ. Если входных сигналов нет, то нет базового тока транзистора, а так как он включен по схеме эмиттерного повторителя, то на выходе сигнала нет. Если будет подан хотя бы один входной сигнал или оба, транзистор откроется и на выходе появится сигнал.
Логическая функция «И» (логическое умножение). Ее математическая запись имеет вид: P=ab, а в устной форме звучит так: событие P произойдет, если произойдет событие а и событие b.
Любая логическая функция характеризуется таблицей состояний (таблицей истинности), в которой представлены все возможные комбинации входных сигналов и соответствующие им выходные сигналы. Для логической функции «И» таблица состояний имеет вид (для двух входных сигналов – а,b, сигнал P-выходной):
Элемент И. Если входных сигналов нет, то база транзистора шунтирована диодами, ток от источника питания проходит через Rб напряжение на базе Uб=∆Uпр диода и недостаточно для отпирания транзистора, последний закрыт, сигнала не выходе нет. Если подан один (любой) сигнал, картина не меняется, и только, когда поданы оба (все) входных сигнала, н базу транзистора поступает практически полное напряжение питания, на выходе появляется сигнал.
Элемент ИЛИ/НЕ. Если входных сигналов нет, транзистор закрыт- на выходе сигнал есть. Если подан хотя бы один сигнал, транзистор открывается, на выходе сигнал исчезает. Схема составлена из диодной схемы ИЛИ и инвертора НЕ на транзисторе.
Элемент И/НЕ. Если входных сигналов нет, транзистор закрыт, на выходе есть сигнал. Если подан один входной сигнал, транзистор остается закрытым (база зашунтирована диодом), и только если поданы оба (все) входных сигнала, на базу транзистора подается сигнал, он открывается и на выходе сигнал исчезает.

12.15 Характерные нагрузки на шинах ГРЩ СЭС переменного тока реактивного или активного типа. Причины возникновения провалов напряжения при «набросе» нагрузки.
Нагрузки на шинах могут быть реактивного ( емкостного и индуктивного) и активного типа. Провалы напряжения возникают из-за промедления отработки СУЧВ ДГ. Так же из-за резкого увеличения тока.
Наибольшим будет при набросе нагрузки реактивного характера в частности индуктивного, так как в этом случае у СГ имеется продольная размагничивающая составляющая реакции якоря.
ТЕМА : Переходные процессы в САЭЭС.
Физические процессы в САЭЭС, если они проходят без изменений параметров, называют установившимися. Если процесс проходит с изменением параметров то его называют переходным. Переходный процесс сопровождается изменением свойств и параметров электрической установки и может рассматриваться как совокупность трёх взаимосвязанных процессов - механического, электромагнитного и теплового.
Причинами переходных процессов могут быть включения каких - либо потребителей электрической энергии, переключения производимые в электрической цепи, какие - либо несанкционированные действия или самопроизвольно возникающие процессы, например, короткое замыкание. Большое практическое значение имеет изучение переходных процессов для предупреждения нежелательных последствий в электросистеме.
Внешнее проявление переходных процессов являются изменения напряжения и частоты тока в функции времени. Практически это выглядит как изменение показаний измерительных приборов. Графически это выглядит как изменение положения и формы
линий изображающих соотношения величин изображающих ход процесса, как например,
-60-
на рисунке 17.1 изображено изменение частоты и напряжения при набросе нагрузки
включение асинхронного электродвигателя соизмеримого по мощности с питающим
генератором. На рисунке 17.1 характерными моментами являются t1 - включение нагрузки, t2 – начало снижения частоты, t3 – момент максимального провала напряжения,
t4 – момент максимального провала частоты, t5 – конец переходного процесса.
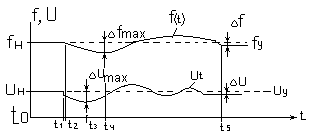
Рис. 17.1. Изменение напряжения и частоты, по времени, при набросе нагрузки.
Пуск асинхронного двигателя под нагрузкой - увеличивает провал напряжения, уменьшает избыточный момент на валу двигателя и затягивает разгон двигателя до номинальных оборотов. Из-за провала напряжения снижается движущий момент на валу двигателя в то время как сопротивление движению сохраняется и результирующий момент сопротивления как бы увеличивается. Это приводит к некоторому запаздыванию снижения частоты t2 относительно момента снижения напряжения t1. Новые установившиеся значения частоты и напряжения будут несколько ниже исходных величин. При сбросе нагрузки процесс пойдёт в противоположном направлении - в начальный момент напряжение несколько увеличится к новые установившиеся значения напряжения и частоты будут несколько выше исходных значений. В нашем случае исходными величинами приняты величины напряжения и частоты непосредственно перед началом переходного промежутка времени - время t1. В следствии статизма скоросных характеристик генератора Δ Umax и Δfmax не должны превышать допустимых значений.
Правилами Регистра ограничения отклонений величин устанавливаются в процентном
отношении к номинальным, поэтому при расчётах переходных процессах используют относительные значения величин, что позволяет применить одну методику расчёта в разных случаях переходных процессов. Для рассмотрения физической картины переходного процесса удобнее всего использовать рачёт переходного процесса при коротком замыкании - этот случаё наиболее полно отражает переходный процесс.
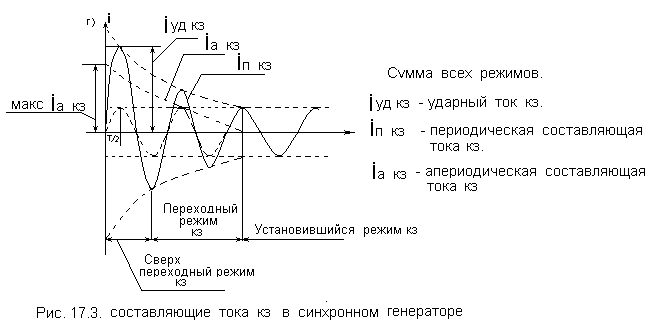
Изменения магнитных потоков и токов будут касаться трёх обмоток - статорной, роторной и успокоительной ( демпферной ). В зависимости от состояния магнитных полей процесс рассматривают в трёх режимах - сверхпереходном, переходном и установившемся. Удобнее всего за исходное состояние генератора перед наступлением переходного
режима принимать холостой ход, когда ротор генератора создавал только основной магнитный поток Фо.
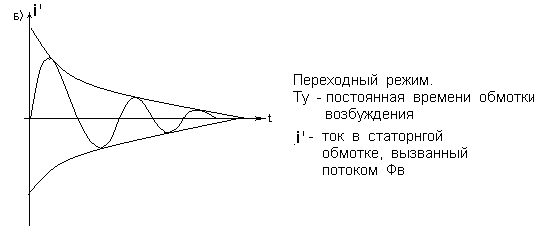
После возникновения КЗ, в статорной обмотке возникает ток ( виток А—Х ) на рисунке 17.2 , который создаёт 2 магнитных потока Фad - реакции якоря и Фs - поток рассеяния. Эти токи вызывают свободные токи в обмотке возбуждения 1 и в успокоительной обмотке 2 создающие магнитные потоки Фв ( вокруг обмотки возбуждения ) , и Фу –
( вокруг успокоительной обмотки ). Ближе к центру генератора поток продольной реакции
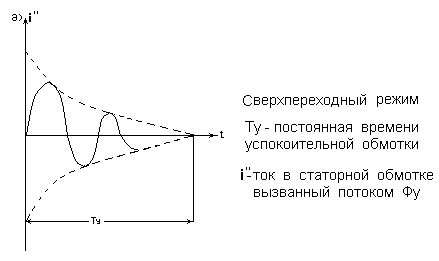
Фad оказывается встречным потоком Ф*ad относительно потоков Фв и Фу и сглаживает их, поэтому поток Фad на периферии генератора огибает потоки Фв и Фу . Это состояние магнитного поля соответствует сверхпереходному режиму ( рис 17.2 а )
И так как свободные токи iсв встречают активное сопротивление в обмотках ротора то они постепенно затухают. Время затухания их называют постоянной времени которое определяется соотношением индуктивности и активного сопротивления обмоток. Т= L/R Индуктивность L успокоительной обмотки мала, а её активное сопротивление R - значительно, сравнительно с теми же параметрами обмотки возбуждения. Поэтому Ту ‹ Тв и ток в успокоительной обмотке затухает быстрее - остаётся действие тока только статорной обмотки и её поток проникает в успокоительную обмотку. Наступает переходный режим ( рис 17.2. б ).
-61-
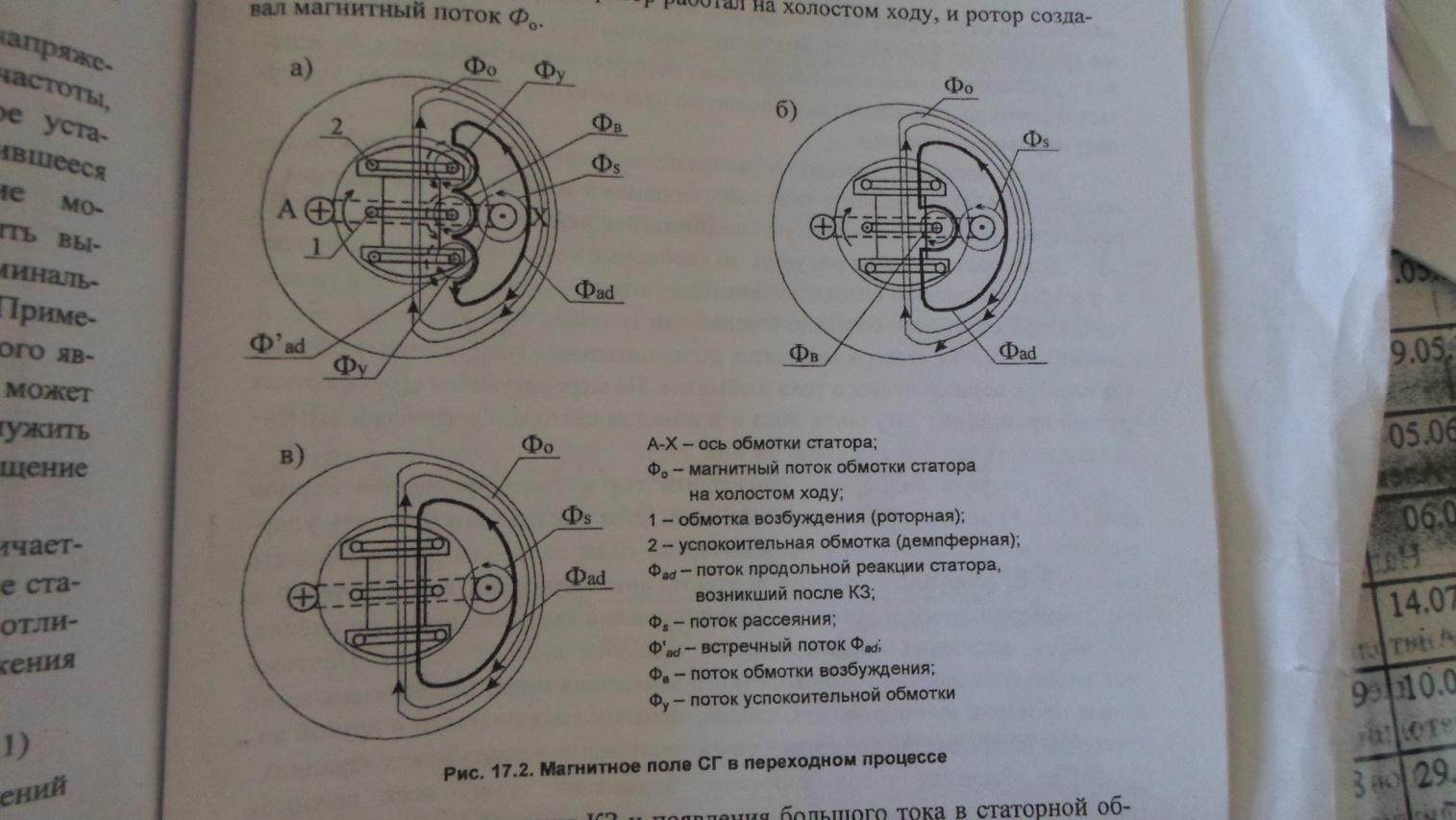
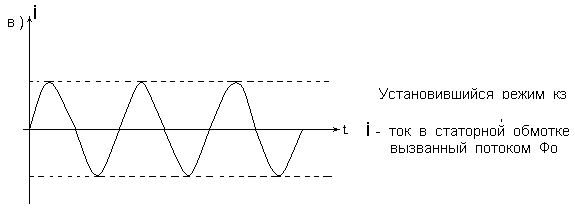
Далее процесс протекает с затуханием свободного тока iсв в обмотке возбуждения и исчезает создаваемый им поток Фв, а поток продольной реакции якоря Фad проникает в обмотку возбуждения и в ротор. Наступает установившийся режим (рис.17.2 в ) когда остаётся поток Фо, несколько изменённый ( уменьшенный ) под действием потока Фad. Напряжение генератора установится ниже уровня напряжения предшествующего КЗ режиму, обороты приводного двигателя и частота тока так же установятся несколько меньшего значения нормального режима нагрузки ( или холостого хода ).
-62-
11.8 механические характеристики ЭД постоянного и переменного тока.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
U я=E я+I я)(R я+R д), (5.35)
где R я – активное сопротивление якоря.
Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
ω=(U я-I я(R я+R д))/kФ. (5.36)
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в
уравнение механической характеристики:
ω=Uя/ kФ – ( R я+ R д)/( kФ) 2)Mэм. . (5.37)
Это уравнение можно представить в виде ω= ω о.ид.- Δ ω, где
ω о.ид.=Uя/kФ (5.38)
ω о.ид - угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм.[(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Рис.5.20
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности.
Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dM