Файл: Задание 1 Задана передаточная функция апериодического звена Определить и построить афх, фчх и переходную характеристику h(t). Исходные данные Решение.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 14
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Задание 1
Задана передаточная функция апериодического звена
Определить и построить АФХ, ФЧХ и переходную характеристику h(t).
Исходные данные:

Решение:
Переходная временная характеристика h(t) - реакция выхода системы на единичное ступенчатое воздействие 1(t) при нулевых начальных условиях [1].
Для нахождения временной характеристики звена определим его реакцию на единичное ступенчатое воздействие. Изображение переходной функции определяется как [2]

Характеристическое уравнение

Корни уравнения

Выполняя обратное преобразование изображения переходной характеристики h(p) получаем


Переходная характеристика звена приведены на рис. 1.
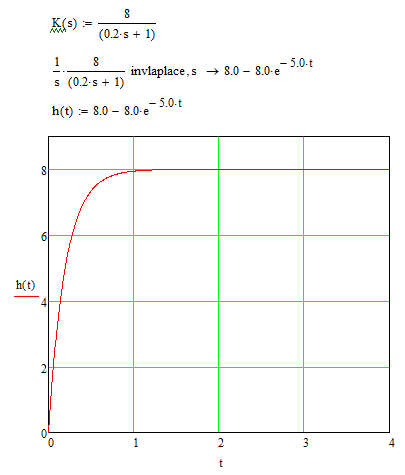
Рисунок 1 - Переходная характеристика апериодического звена
Найдем комплексную передаточную функцию (КПФ). Для этого заменим p на jω [2].
Зависимость модуля КПФ от частоты называется амплитудно-частотная характеристика (АЧХ) системы [2]

Амплитудно-частотная характеристика звена определяется как:
Для построения АЧХ найдем характерные точки:
При

.
При


При

По рассчитанным значениям построим график АЧХ
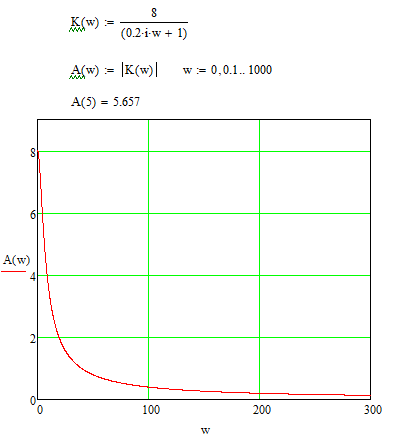
Рисунок 2 - График АЧХ апериодического звена
Зависимость аргумента КПФ представляет собой фазо-частотную характеристику (ФЧХ) системы [2]
 .
.Вещественная
 и
и  мнимая частотные характеристики звена определяются как
мнимая частотные характеристики звена определяются как
Фазо-частотная характеристика определяется как


Для построения ФЧХ найдем характерные точки:
При
 ,
, 
При


При


При


При


По рассчитанным значениям построим график ФЧХ
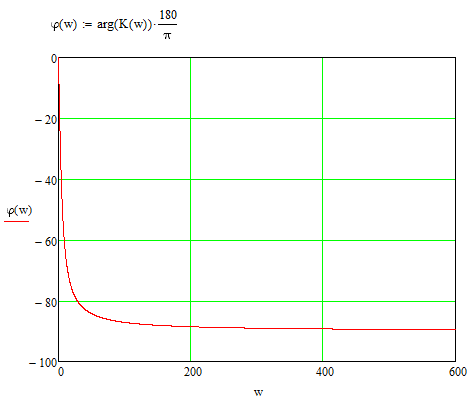
Рисунок 3 - График ФЧХ апериодического звена
Задание 2
Задана передаточная функция разомкнутой системы управления

Оценить устойчивость системы по критерию Гурвица.
Исходные данные:


Решение:
Найдем передаточную функцию замкнутой системы

Характеристический полином замкнутой системы

Обозначим


Критерий Гурвица: для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все диагональные миноры имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения C0, то есть при C0 > 0 были положительны. Эти миноры называются определителями Гурвица [3].
Составим определитель Гурвица по следующему правилу: по главной диагонали определителя слева направо в порядке возрастания индексов выписывают все коэффициенты характеристического уравнения от
 до
до  . Столбцы вверх от главной диагонали дополняют коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – с последовательно убывающими индексами. На место коэффициентов с индексами больше и меньше
. Столбцы вверх от главной диагонали дополняют коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – с последовательно убывающими индексами. На место коэффициентов с индексами больше и меньше  проставляют нули [3].
проставляют нули [3].
Вычислим диагональные миноры при






Так как С0 > 0, и все диагональные миноры больше нуля, то рассматриваемая система устойчива.
Задание 3
На САУ с разомкнутой передаточной функцией
действует управляющий сигнал
 . Определить ошибку в установившемся режиме.
. Определить ошибку в установившемся режиме.Исходные данные:

Решение:
Для установившейся ошибки воспроизведения медленно меняющихся управляющих воздействий было получено выражение, имеющее для непрерывных систем следующую форму[2]

где
 ,
,  ,
,  , …,
, …, - коэффициенты ошибок, определяемые по выражению
- коэффициенты ошибок, определяемые по выражению
Так
 где
где  - передаточная функция замкнутой системы по ошибке от воздействия g(t) [2].
- передаточная функция замкнутой системы по ошибке от воздействия g(t) [2]. Используя выражение для установившейся ошибки через коэффициенты ошибок, найдем значение коэффициентов ошибок при отработке непрерывной системой линейного воздействия
.Порядок астатизма системы υ = 1.
Передаточная функция замкнутой системы по ошибке

Установившаяся ошибка при отработке линейного воздействия

Определим коэффициенты ошибок


Установившееся значение ошибки
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Гаркушенко, В.И. Теория автоматического управления: учебное пособие / В.И. Гаркушенко, Г.Л. Дегтярев. - Казань: Гос.тех.ун-та, 2010. – 274 с. -
Козлова, Л.П. Теория автоматического управления. ч. 1: учебно-методический комплекс / Л.П.Козлова, О.И.Золотов. - СПб.: Изд-во СЗТУ, 2009. – 252 с. -
Усынин, Ю.С. Теория автоматического управления: учебное пособие для вузов / Ю.С. Усынин. – Челябинск: Издательский центр ЮУрГУ, 2010. – 176 с.