Файл: Исследование плунжерного электромагнита Индивидуальное задание 2 по дисциплине.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 94
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство НАУКИ И ВЫСШЕГО образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Национальный исследовательский Томский политехнический Университет»

Школа базовой инженерной подготовки
Отделение общетехнических дисциплин
Исследование плунжерного электромагнита
_________________________
Индивидуальное задание № 2
по дисциплине:
Современные технологии
| Исполнитель: | Куренков Тимофей | ||||
| студент группы | 5А06 | | ФИО | | 17.12.2021 |
| | | | | | |
| Руководитель: | ФИО | ||||
| преподаватель | Киселев А.В | | | | |
| | | | | | |
Томск – 2021
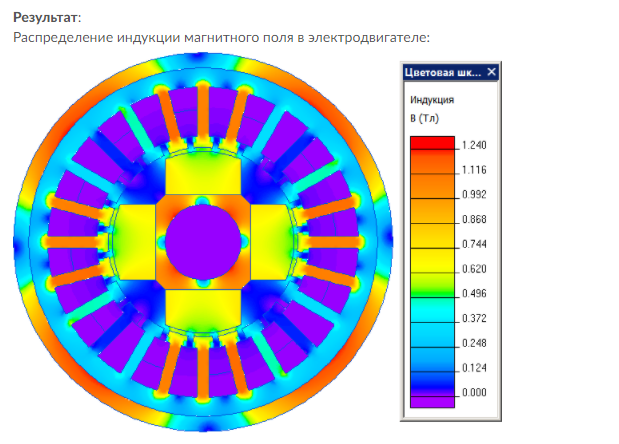
Задача: Улучшение характеристик заданного электродвигателя.
Бесщеточный двигатель постоянного тока с постоянными магнитами и трехфазной коммутируемой обмоткой на статоре.

Дано
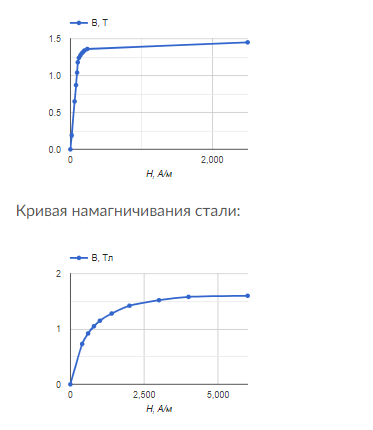
Четыре магнита сделаны из сплава Самарий-Кобальт, который имеет относительную магнитную проницаемость 1.154 и коэрцитивную силу 550 кA/м.
Плотность тока в обмотках:
1.3 МA/м² в R+, –1.3 МA/м² в R–,
1.3 МA/м² в S+, –1.3 МA/м² в S–,
и нулевая в T+ и T–.
Наружная и внутренняя части сделаны из сплава Кобальт-Никель-Железо-Медь:
Варианты решения задачи:
Увеличение мощности при помощи изменения несущей частоты ШИМ.
Для того чтобы решить задачу по улучшение характеристик заданного электродвигателя, разберемся какие электродвигатели используются чаще всего и что требуется для их работы.
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
Решение(1)
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
ВЛИЯНИЕ НЕСУЩЕЙ ЧАСТОТЫ ПЧ НА РАБОТУ ЭЛЕКТРОДВИГАТЕЛЯ:
Преобразователи частоты (ПЧ, частотники, инверторы) давно используются в промышленности для управления скоростью и повышения КПД асинхронных и синхронных электродвигателей. К ним давно привыкли, их возможности существенно выросли за последние 20 лет и с трудом вмещаются в руководства с тысячей страниц, но есть базовые функции, о которых следует помнить. Эта статья об одной из них - несущей частоте (carrier frequency) широтно-импульсной модуляции (ШИМ, PWM) ПЧ и ее влиянии на работу и КПД электродвигателя.
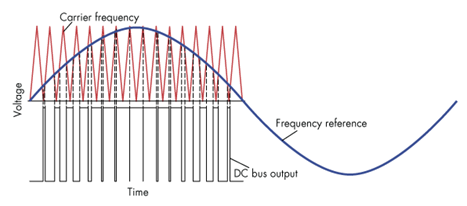
Несущая частота в ПЧ и ее влияние на ШИМ.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент. Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Из за человеческого фактора, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет плавать вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
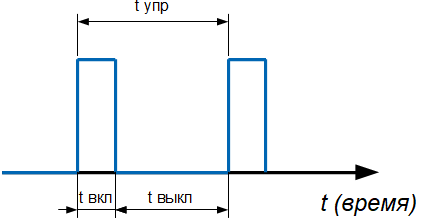
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.
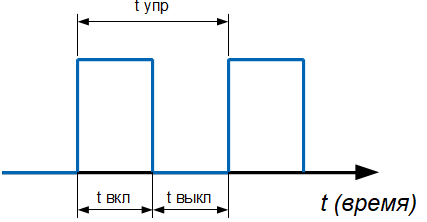
Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.
Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
ПОВЫШЕНИЕ НЕСУЩЕЙ ЧАСТОТЫ — МЕНЬШЕ ШУМА
При повышении несущей частоты ШИМ которой задается частота на двигатель снижается количество высших гармоник и уменьшается амплитуда бросков тока при питании двигателя. Уменьшение высших гармоник тока снижает паразитное намагничивание статора, которое является источником слышимого шума, насыщения железа и потерь в обмотках, вызывающих снижения КПД двигателя являющегося причиной его нагрева.

Снижение шума двигателя за счет повышения частоты
Например, при несущей частоте ШИМ более 8 кГц происходит существенное снижение шума от электродвигателя, что позволяет применять их при автоматизации офисных и жилых зданий, медицинских и научных учреждений.
Проблема перегрева ПЧ
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя.
Какие же меры можно предпринять для того чтобы избежать проблему перегрева ПЧ?
Охлаждение частотного преобразователя обеспечивается встроенным вентилятором, который «снимает» горячий воздух с радиаторов IGBT-модулей. Таких вентиляторов может быть несколько, они могут устанавливаться как в верхней, так и в нижней частях ПЧ.
Работа вентилятора в постоянном режиме не всегда целесообразна, ведь при этом он загрязняется и уменьшается его ресурс. Поэтому в ПЧ может быть реализовано несколько режимов работы встроенных вентиляторов, настройка которых производится в программном меню:
-
Вентилятор работает всегда, когда на ПЧ подано питание. -
Вентилятор включается при пуске, выключается при остановке привода или по команде “STOP”. -
Вентилятор включается при пуске, выключается через некоторое время после остановки привода. -
Вентилятор включается в зависимости от температуры радиатора (предпочтительный режим). -
Вентилятор выключен всегда (нежелательный режим).
Обычно в частотном преобразователе осуществляется постоянный контроль температуры с помощью встроенных датчиков. При перегреве выдается ошибка, и привод останавливается. Для контроля охлаждения также применяют вентиляторы с обратной связью (контроль вращения).
Стоит сказать, что целесообразно управлять не только встроенными вентиляторами, но и вентиляторами охлаждения шкафа. Для этого можно установить внутрь шкафа термоконтроллер (термореле), по сигналу которого будет подаваться питание на вентилятор. Это особенно полезно, если шкаф установлен в месте, где температура существенно меняется в течение суток или в течение года. Таким образом не только экономится ресурс вентилятора, но и отпадает необходимость технического обслуживания воздушного фильтра в холодное время.
Вывод: Для того чтобы избегать перегрева ПЧ при увеличении ШИМ нам необходимо обеспечить наш электродвигателем дополнительным охлаждением.
Выбор по мощности
Главный критерий выбора частотного преобразователя для электродвигателя — мощность. Частотник не должен быть менее мощным чем управляемый им двигатель. Мощнее быть может, слабее — нет. Но все не так просто, так как конкретное соотношение мощностей зависит от типа оборудования, к которому будет подключаться преобразователь. Частотный преобразователь для электродвигателя с двумя парами полюсов, должен иметь мощность:
-
равную двигателю, если движок работает постоянно (транспортеры); -
не ниже 150% от мощности, если движок работает с перегрузкой; -
не менее 120% от мощности движка для центробежных насосов и вентиляторов; -
для управления моторами подъемной техники, может понадобиться двукратное превышение мощности.