Файл: Отчет по лабораторной работе 1 по дисциплине Вычислительная математика.docx
Добавлен: 11.01.2024
Просмотров: 35
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Сибирский государственный университет науки и технологий
имени академика М.Ф. Решетнева»
Институт информатики и телекоммуникаций
Кафедра информационно-управляющих систем
Отчет по лабораторной работе №1
по дисциплине: «Вычислительная математика»
Тема: Численное решение систем линейных алгебраических уравнений
Вариант 3
Преподаватель Кириллов К. А.
Обучающийся БИЭ21-01, Бондарев В. А.
Красноярск 2023 г.


a
Дана система линейных алгебраических уравнений (СЛАУ)
Au f , (1)

 11
11 где A 21 31
где A 21 31a41
a
a
12 13 a22 a23 a32 a33
a42 a43
14 u1 f1





a
a
a24 , u u2 , f f2 . 34 3 3 44 4 4
1. Решить СЛАУ (1) методом Гаусса с выбором главного элемента по
столбцам.
2. Привести СЛАУ (1) к виду
uBuF,
приемлемому для применения метода простой итерации, и проверить выполнение достаточного условия сходимости этого метода, т. е.

 B q1, (2)
B q1, (2)1

где BEA, F f , E 0
0
0 0 1 0 0 1
0 0
0

0, значение выбрать таким, чтобы
1
выполнялось неравенство (2).
Решить эту СЛАУ методом простой итерации
uk1 BukF
с точностью 0,01, предварительно преобразовав ее к виду, приемлемому
для применения этого метода. В качестве начального приближения выбрать
u0 0, где 0 0,0,0,0T .
В качестве условия остановки итерационного процесса (для
достижения заданной точности ) использовать неравенство

uk1 uk1q, (3)
где q– константа из неравенства (2). Имеет место неравенство

 εk1quk1 uk,
εk1quk1 uk,где εkukU, U – вектор точного решения СЛАУ, uk1 и uk – векторы приближенного решения СЛАУ, полученные на k1-й и k-й итерациях соответственно. Следовательно, если выполняется неравенство
 1quk1 uk,
1quk1 uk,равносильное неравенству (3), то справедливо и неравенство
 εk,
εk,обеспечивающее нахождение вектора uk приближенного решения СЛАУ с
заданной точностью .
В качестве нормы uk1 uk вектора uk1 uk взять октаэдрическуюнорму, определяемую равенством



4
u ui, где u u1,u2,u3,u4 T , i1
а в качестве нормы B матрицы B – норму, согласованную с октаэдрическойнормой вектора, определяемую следующим образом:



 B max 4 b, где B b4 .
B max 4 b, где B b4 .1j4 i1
Вариант3:
Выполнение работы
1. Решение СЛАУ методом Гаусса
Решение линейной системы методом Гаусса реализовано в функции SolveByGauss. Она принимает в качестве входных параметров матрицу коэффициентов и столбец свободных членов системы и пытается выполнить процедуру гауссова исключения в цикле по всем столбцам.
На каждом шаге в качестве главного элемента выбирается наибольший по модулю среди элементов ниже главной диагонали. Выбранный элемент сравнивается с заданным параметром ZeroCoef, взятым равным
 чтобы предотвратить попытки деления на малые числа. В случае, если модуль главного элемента оказался меньше этой величины, матрица считается вырожденной, и функция SolveByGauss возвращает
чтобы предотвратить попытки деления на малые числа. В случае, если модуль главного элемента оказался меньше этой величины, матрица считается вырожденной, и функция SolveByGauss возвращает  В противном случае функция завершается успешно, возвращает
В противном случае функция завершается успешно, возвращает  а в выходной параметр
а в выходной параметр  записывается найденное решение системы.
записывается найденное решение системы.На каждом шаге отображается результат исключения, а после успешного завершения – найденное решение системы.
Текст программы Visual studio на С++:
///////////////////////////////////////////////////////////////////////////////
// решение методом Гаусса
//
// A и f - матрица коэффициентов и столбец свободных членов системы
// u - вектор решения системы (выходной параметр)
//
// возвращаемое значение - true, если система успешно решена, и false,
// если на некотором шаге ведущий элемент
// оказался по модулю меньше порогового значения,
// установленного для проверки вырожденности
//
///////////////////////////////////////////////////////////////////////////////
bool SolveByGauss(const double A[N][N], const double f[N], double u[N])
{
double M[N][N];
double b[N];
int i;
int j;
int iPivotRow;
double dblSum;
for (i = 0; i < N; ++i)
{
for (j = 0; j < N; ++j)
M[i][j] = A[i][j];
b[i] = f[i];
}
for (i = 0; i < N - 1; ++i)
{
if (abs(M[i][i]) < ZeroCoef)
return false;
if (FindPivotElm(M, i, i, iPivotRow))
SwapRows(M, b, i, iPivotRow);
cout << endl
<< "Исключение с помощью коэффициента А("
<< i + 1 << "," << i + 1 << ")." << endl
<< endl;
EliminateCol(M, b, i, i);
cout << "Результат исключения:"
<< endl;
OutLinSys(M, b);
}
for (i = N - 1; i >= 0; --i)
{
dblSum = b[i];
for (j = i + 1; j < N; ++j)
dblSum -= M[i][j] * u[j];
u[i] = dblSum / M[i][i];
}
return true;
Результат работы этой части приложения показан на снимке экрана:
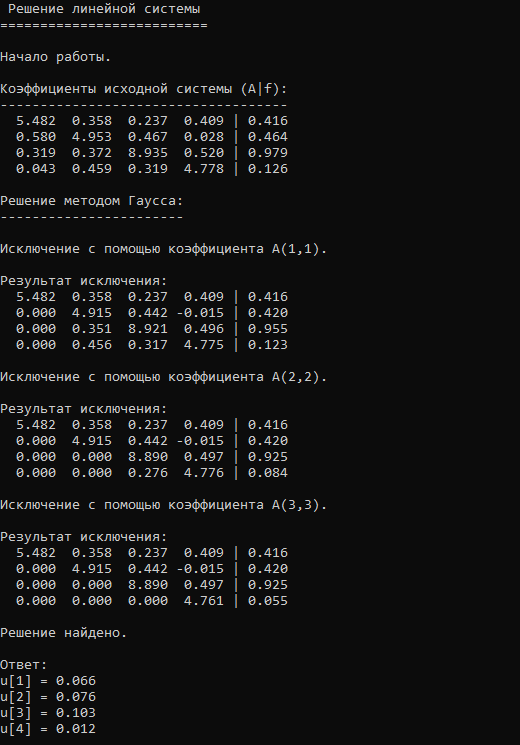
Получено решение методом Гаусса:
u=

2. Решение методом простой итерации
Для применения метода простой итерации система преобразуется к заданному виду

Диагональные коэффициенты исходной матрицы принимают значения в промежутке от 4,778 до 8,935, т.е. от
 до
до  Середина такого промежутка -
Середина такого промежутка -  В качестве параметра
В качестве параметра  взято значение
взято значение
Преобразованная матрица
 оказывается имеющей норму
оказывается имеющей норму
Это обеспечивает сходимость метода простой итерации.
Решение методом простой итерации для преобразованной системы реализовано в виде функции SolveBySimpleIters. Она принимает в качестве входных параметров коэффициенты и свободные члены системы, а также заданную точность
 и предельно допустимое число итераций MaxIters (для предотвращения зависания).
и предельно допустимое число итераций MaxIters (для предотвращения зависания).В случае успеха полученное решение заносится в выходной параметр
 Этот параметр также используется в качестве входного для задания начального приближения.
Этот параметр также используется в качестве входного для задания начального приближения.Погрешность на каждом шаге контролируется с помощью вычисления нормы разности двух векторов предыдущего и последующего приближений. Для этих вычислений используется функция VectorDiffNorm.
Текст программы Visual studio на С++:
///////////////////////////////////////////////////////////////////////////////
// решение методом простой итерации
//
// В и F - матрица коэффициентов и столбец свободных членов системы
// u - вектор решения системы (на входе - начальное приближение,
// на выходе - результат итераций)
// Eps - требуемая точность
// MaxIters - предельно допустимое число итераций
//
///////////////////////////////////////////////////////////////////////////////
bool SolveBySimpleIters(const double B[N][N], const double F[N],
double u[N],
const double Eps = 0.01, const int MaxIters = 1000)
{
int i;
int j;
double dblMinDiagElm = abs(B[0][0]);
for (i = 1; i < N; ++i)
if (dblMinDiagElm > abs(B[i][i]))
dblMinDiagElm = abs(B[i][i]);
assert(dblMinDiagElm > ZeroCoef);
double dblPrevU[N];
double dblNextU[N];
for (i = 0; i < N; ++i)
{
dblNextU[i] = u[i];
// обеспечивается заведомое нарушение
// условия сходимости
// на начальной итерации
dblPrevU[i] = dblNextU[i] + Eps + 1;
}
int iIterNo = 0;
double dblSum;
double q = MatrixNorm(B);
double Eps1q = Eps * (1 - q);
while ((iIterNo < MaxIters) && (VectorDiffNorm(dblPrevU, dblNextU) > Eps1q))
{
++iIterNo;
for (i = 0; i < N; ++i)
dblPrevU[i] = dblNextU[i];
for (i = 0; i < N; ++i)
{
dblSum = 0;
for (j = 0; j < N; ++j)
dblSum += B[i][j] * dblPrevU[j];
dblNextU[i] = dblSum + F[i];
}
//////////////////////////////////////////////////////////////////////////////
// debug
//////////////////////////////////////////////////////////////////////////////
cout << "Итерация " << iIterNo << ":" << endl;
cout << "-------------" << endl;
cout << endl;
for (int k = 0; k < N; ++k)
cout << " u[" << k + 1 << "] = " << fixed << setprecision(OutSolutionPrec)
<< dblNextU[k] << endl;
cout << endl;
cout << " || NextU - PrevU || = " << scientific << setprecision(1)
<< VectorDiffNorm(dblNextU, dblPrevU) << endl;
cout << endl;
}
for (i = 0; i < N; ++i)
u[i] = dblNextU[i];
return iIterNo < MaxIters;
}
Результат работы этой части приложения показан на снимках экрана:
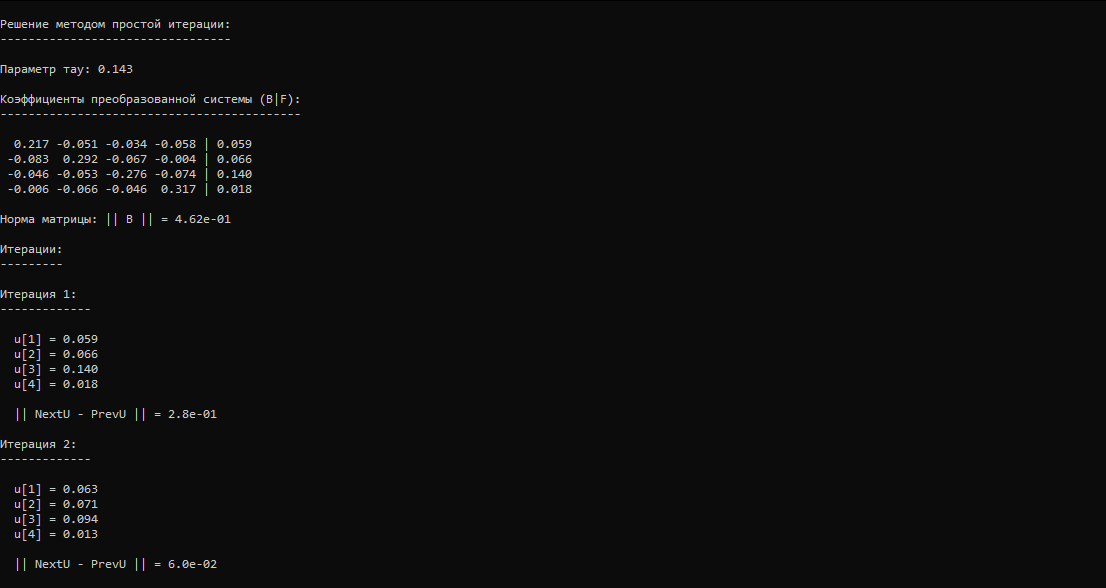

Таким образом, потребовалось 4 итерации.
Решение:
u=
