Файл: Задание на курсовой проект студента Тема проекта Расчет одноконтурной автоматической системы регулирования.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 56
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Существует несколько разных способов определения передаточной функции по кривой разгона. Так, один из методов предполагает некоторые графические решения и применение диаграммы Ольденбурга-Сарториуса для определения постоянных времени. Другой метод предполагает анализ импульсной характеристики и единичного импульсного возмущения для определения динамических свойств объекта. Третий способ предполагает разложение инверсной передаточной функции в ряд Тейлора и определение ее коэффициентов.
Причем, учитывая неточность графических методов, очевидно, что передаточная функция будет описывать динамические свойства объекта не точно, а лишь приближенно. Поэтому имеет смысл определять ее всеми возможными способами, после чего оценить их адекватность экспериментальным данным, чтобы выбрать из имеющихся передаточных функций именно ту, которая отражает свойства объекта наиболее точно.
РАСЧЕТ ОДНОКОНТУРНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Задание:
Динамические свойства объекта регулирования по каналу регулирующего воздействия определены импульсной характеристикой.
Регулируемая величина — температура перегретого пара котельного агрегата. Импульсная характеристика получена в результате нанесения возмущения, созданного скачкообразным уменьшением и последующим скачкообразным увеличением через τимп подачи конденсата на впрыск в пароохладитель на величину Ξвх.имп , измеренную в процентах хода регулирующего органа (% х.р.о.). Значения Ξвх.имп и τимп определены вариантом задания. Максимальный расход конденсата на впрыск, соответствующий 100% х.р.о., составляет 6 т/час. Номинальная температура перегретого пара 400оС. Изменение регулируемой величины (в отклонениях от номинального значения) в результате импульсного возмущающего воздействия, задано в безразмерном виде таблицей 1.
Исходные данные:
| t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| | 0 | 0 | 0 | 1 | 2 | 5 | 10 | 12 | 14 | 15 | 14 | 12 | 10 | 6 | 3 | 1 | 0 |
ПИД-регулятор
τимп= 60 секунд
Ξвх. имп = 25 % х.р.о.
at = 25 секунд
aθ = 2,0 градуса
М = 1,62
-
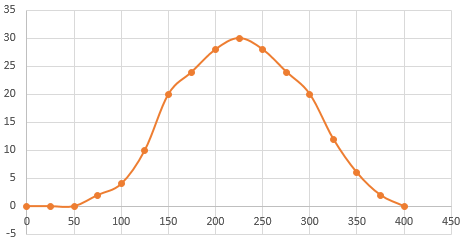
Перейдем к размерному виду импульсной характеристики.
Изменение регулируемой величины задано таблицей в безразмерном виде. Чтобы перейти к размерному виду, нужно умножить значение безразмерного времени и безразмерного отклонения на соответствующие значения масштабных коэффициентов at и aθ:
t = t*at
θ =
Тогда зависимость θ(t) примет следующий вид:
| t | 0 | 25 | 50 | 75 | 100 | 125 | 150 | 175 | 200 | 225 | 250 | 275 | 300 | 325 | 350 | 375 | 400 |
| θ | 0 | 0 | 0 | 2 | 4 | 10 | 20 | 24 | 28 | 30 | 28 | 24 | 20 | 12 | 6 | 2 | 0 |
Построим график импульсной характеристики θ(t):
-
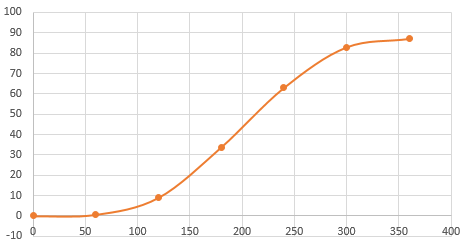
Построим кривую разгона.
Для перестройки импульсной характеристики в кривую разгона необходимо разбить наблюдаемое время на интервалы величиной tимп., найти интерполяцию импульсной характеристики в точках ti и сложить ординаты графиков θ(t) и h(t) по формуле:
h(ti) = h(ti-1) + θ(ti)
Тогда полученная зависимость h(t) будет выглядеть следующим образом:
-
t
0
60
120
180
240
300
360
θ
0
0,7
8,3
24,7
29,2
20
4,2
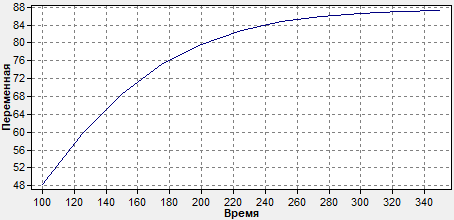
h
0
0,7
9
33,7
62,9
82,9
87,1
Построив график этой зависимости, получим кривую разгона:
-
Определим передаточную функцию по импульсной характеристике
Определим динамические параметры объекта по импульсной характеристике:
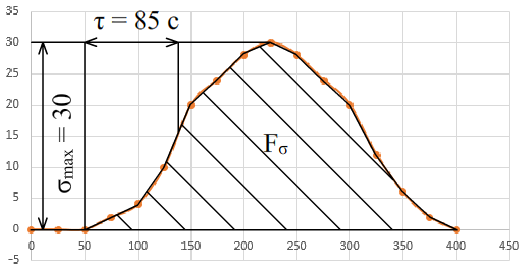
Fσ = Σi=116
σmax = 30 – максимальное отклонение регулируемой величины.
τ = 135 – 50 = 85 – время запаздывания.
Импульсный входной сигнал:
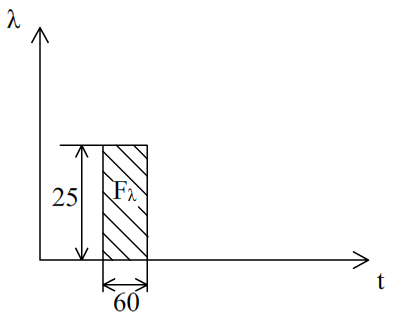
Fλ = Ξвх.имп*τимп. = 25*60 = 1500 – площадь графика импульсного возмущения.
k = Fσ/Fλ = 5250/1500 = 3,5 – коэффициент усиления.
Ta = Fλ/σmax = 1500/30 = 50 – постоянная времени.
Передаточная функция будет иметь вид:
W(P) = k*e-tp/(Ta*P + 1)
W(P) = 3,5*e-85p/(50*P + 1)
-
Определим передаточную функцию методом Ольденбурга-Сарториуса
Коэффициент усиления найдем как отношение установившегося значения выхода к значению входа:
k = 87,1/25 = 3,5
Время запаздывания определим путем графического решения уравнения:
h(τ) = Δ = (0,02÷0,05)*h(t)max, откуда
τ = 100 c при Δ = 4,355o
Параметры Ta и Tc определим графически, найдя точку перегиба графика переходной функции:
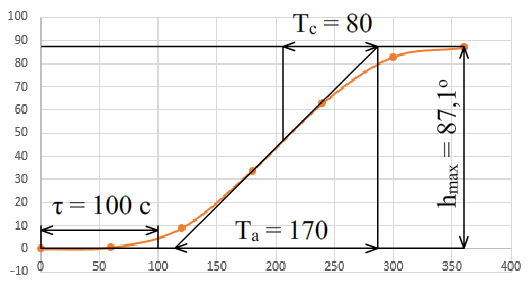
Ta = 170
Tc = 80
Tc/Ta = 0.48
Округляем Tc/Ta до 0,73 и по известному отношению Tc/Ta с помощью диаграммы Ольденбурга-Сарториуса определяем постоянные времени T1 и T2:
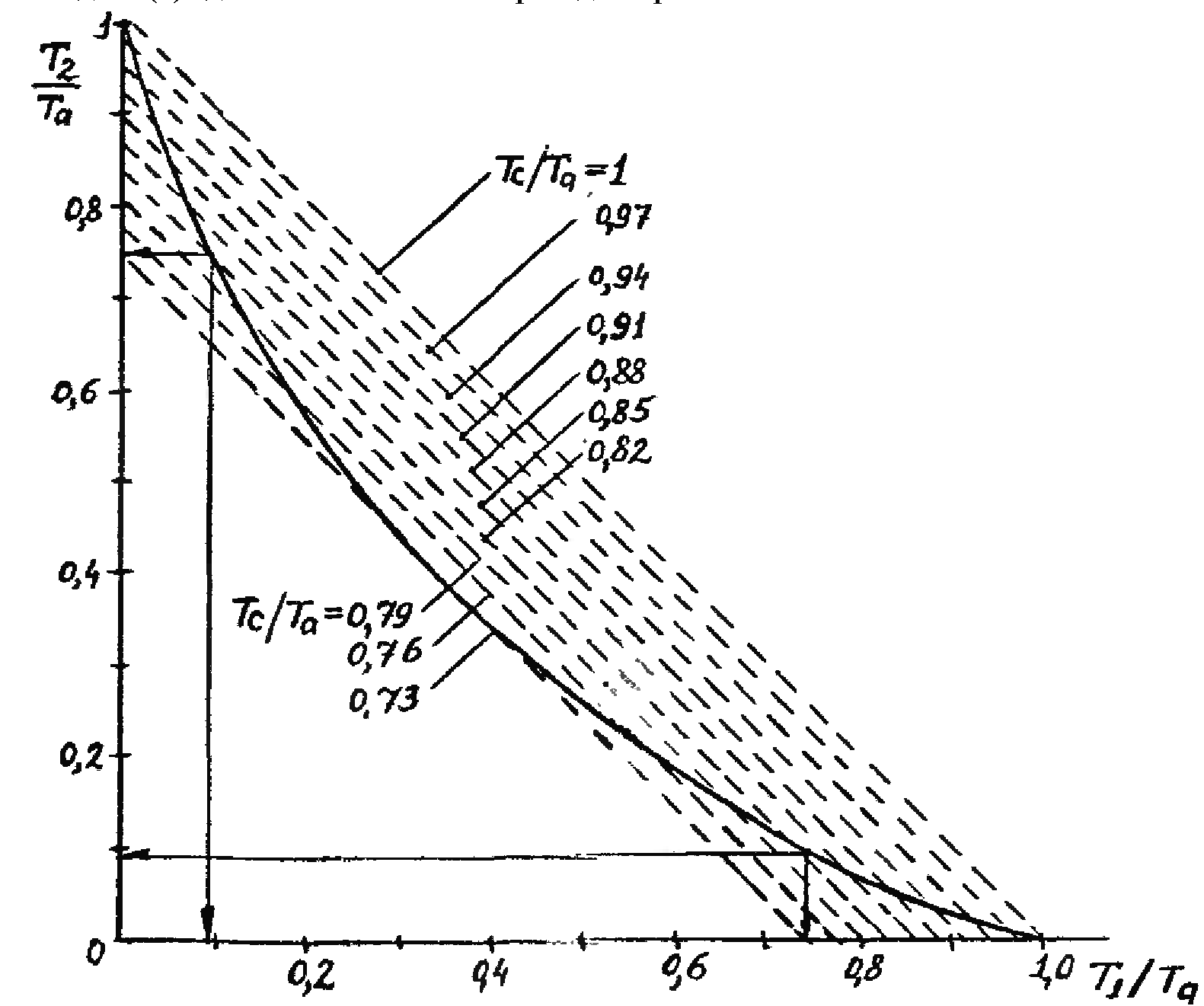
T1 / Ta = 0.4
T2 / Ta = 0.4
Т1 = 0,4*Ta = 68
Т2 = 0,4*Ta = 68
Передаточная функция будет иметь вид:
W(P) = k*e-tp/((T1*P + 1)*(T2*P + 1))
W(P) = 3,5*e-100p/((68*P + 1)*(68*P + 1))
W(P) = 3,5*e-100p/(4624*P2 + 136*P + 1)
-
Определим передаточную функцию методом площадей при помощи программы simou.exe
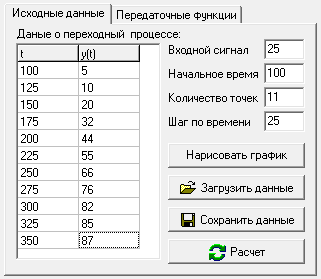
Получили семейство из девяти передаточных функций, из которых в дальнейшем будем рассматривать следующую:
W(P) = 3,484/(3326,7*P2 + 101,7*P + 1)
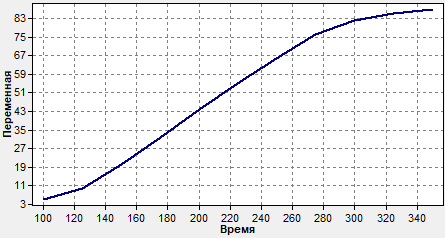
Переходная кривая для этой функции выглядит следующим образом:
-
Построим и сравним переходные характеристики передаточных функций с помощью пакета Simulink
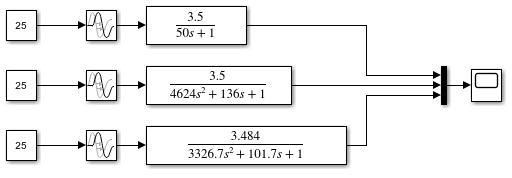
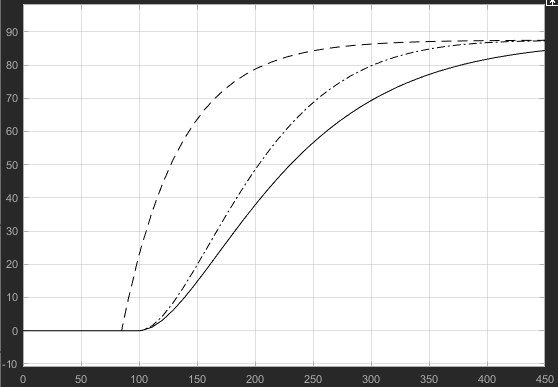
На изображении выше изображены графики:
Пунктирной линией – передаточной функции, полученной по импульсной характеристике.
Сплошной линией – передаточной функции, полученной методом Ольденбурга-Сарториуса.
Штрихпунктирной линией – передаточной функции, полученной методом площадей.
-
Оценим дисперсию полученных переходных характеристик передаточных функций
Графически определим отклонения всех трех переходных кривых от экспериментальных данных по формуле:
σi2 = (hэксп.i – hрасч.i)2, где
σрасч.i2 – дисперсия в точке ti
hэксп.i – экспериментальное значение величины h(t)
hрасч.i – расчетное значение величины h(t)
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| ti | 0 | 60 | 120 | 180 | 240 | 300 | 360 |
| σимп.i2 | 0 | 0,5 | 1225 | 1624 | 445,2 | 9,6 | 0 |
| σолд.i2 | 0 | 0,49 | 36 | 32,5 | 98 | 193,2 | 82,8 |
| σсим.i2 | 0 | 0,49 | 25 | 18,49 | 4,41 | 8,41 | 4,41 |
Теперь, зная дисперсии всех трех кривых h(t) во всех точках ti, можем найти их общие дисперсии, как среднее арифметическое от всех найденных ранее по формуле:
σ2 = (1/n)Σi=1n (σрасч.i2)
Тогда
σимп2 = 472
σолд2 = 63,3
σсим2 = 8,74
Как видно, меньше всего от экспериментальных значений величины h(t) отклоняется кривая, передаточная функция которой была найдена методом Симою. Тогда в дальнейшем будем рассматривать именно ее.
-
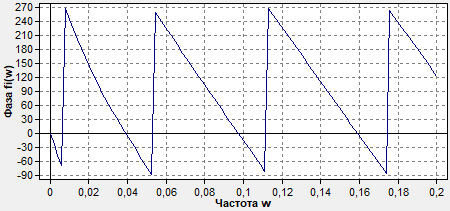
Построим частотные характеристики объекта регулирования (АФХ, АЧХ и ФЧХ)
АФХ - амплитудно-фазовая характеристика
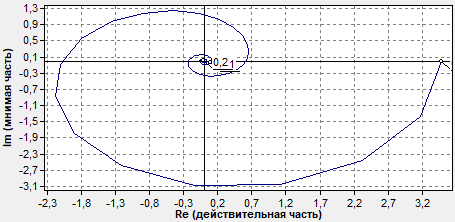
АЧХ – амплитудно-частотная характеристика
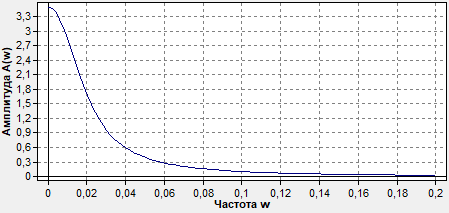
ФЧХ – фазово-частотная характеристика
-
Рассчитаем оптимальные значения параметров настройки
Определим значение показателя колебательности, решив уравнение:
M = (1 + m2)/2*m
2*m*M = 1 + m2
m2 – 2*m*M + 1 = 0
M = 1,62
m1 = 2,8945
m2 = 0,3455
Из двух корней m1 и m2 выбираем меньший, т.е. принимаем m = 0,3455.
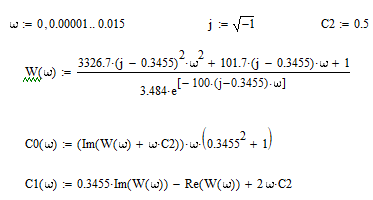
Перейдем к инверсной расширенной частотной характеристике, произведя подстановку P = ω*(j - m) и преобразовав передаточную функцию к следующему виду:
W(m, ij)инв. = 1/W(m, ij)
W(m, ij) = (4624*P2 + 136*P + 1)/3,5
Выделив из нее действительную и мнимую части, сможем определить значения параметров настройки C1 и C0, при С2 = 0.5:
Построим график зависимости C0(C1) и определяем из него C1 и C0 следующим образом: находим на кривой точку максимума и выбираем точку правее него. Полученные значения C1 и C0 подставим в схему системы управления и сравним их между собой по значению интегрально-квадратичного критерия качества.
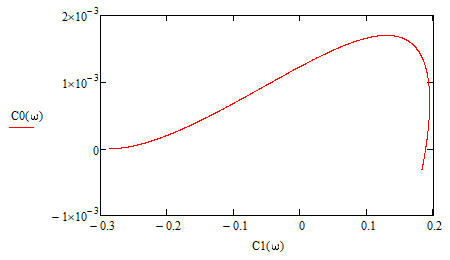
| Значение параметра настройки C1 | Значение параметра настройки C0 | Интегральный критерий качества I |
| 0,15447 | 0,00165 | 89450 |
| 0,16447 | 0,00160 | 86650 |
| 0,17029 | 0,00155 | 84960 |
| 0,17463 | 0,00150 | 83660 |
| 0,17839 | 0,00145 | 82520 |
| 0,18091 | 0,00140 | 81670 |