Файл: Задание на курсовой проект студента Тема проекта Расчет одноконтурной автоматической системы регулирования.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 55
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Параметры настройки C0 и C1 при С2 = 1,0
| Значение параметра настройки C1 | Значение параметра настройки C0 | Интегральный критерий качества I |
| 0,16565 | 0,00165 | 86710 |
| 0,17483 | 0,00160 | 84250 |
| 0,18114 | 0,00155 | 82540 |
| 0,18571 | 0,00150 | 81260 |
| 0,18935 | 0,00145 | 80200 |
| 0,19236 | 0,00140 | 79300 |
Параметры настройки C0 и C1 при С2 = 1,5
| Значение параметра настройки C1 | Значение параметра настройки C0 | Интегральный критерий качества I |
| 0,17457 | 0,00165 | 84640 |
| 0,18496 | 0,00160 | 82030 |
| 0,19159 | 0,00155 | 80330 |
| 0,19622 | 0,00150 | 79100 |
| 0,20063 | 0,00145 | 77940 |
| 0,20382 | 0,00140 | 77050 |
Как видно из таблиц, наилучшими свойствами будет обладать регулятор с настройками: C0 = 0,00140 C1 = 0,20382 при С2 = 1,5.
-
Построим схему полученной системы регулирования
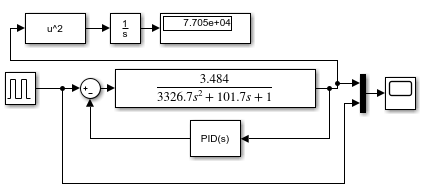
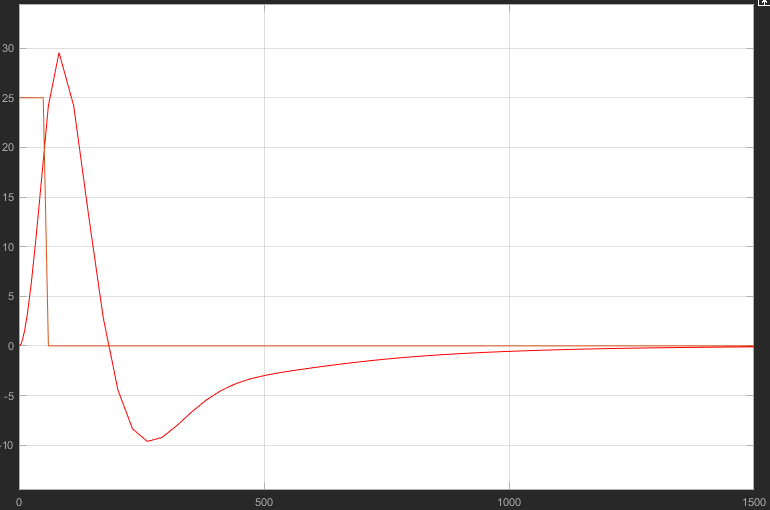
График переходного процесса полученной системы регулирования:
-
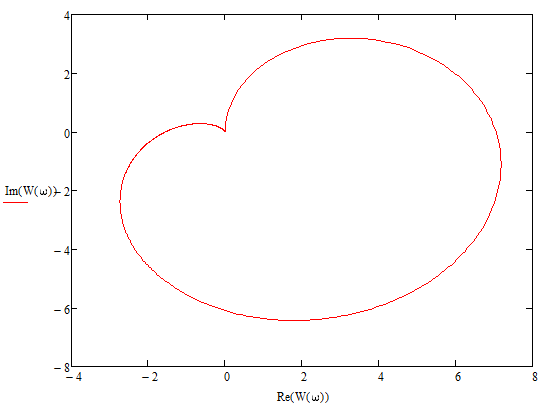
Получим передаточную функцию замкнутой системы относительно возмущающего воздействия, найдем и построим КЧХ замкнутой системы относительно возмущающего воздействия.
Передаточная функция объекта регулирования:
W(P)об = 3,484/(3326,7*P2 + 101,7*P + 1)
Передаточная функция ПИД-регулятора:
W(P)рег = 0,20382 + 0,00140/p + 1.5*p
Передаточная функция внешнего возмущающего воздействия:
W(P)возм = 3,5/(50*P + 1)
Передаточная функция замкнутой системы относительно внешнего возмущающего воздействия:
W(P) = (W(P)об*W(P)возм)/(1 + W(P)об*W(P)рег)
W(P) =
Произведем замену p = ω*j:

Построим КЧХ замкнутой системы, относительно возмущающего воздействия:
12. Построим схему полученной системы регулирования и оценим качество переходного процесса по регулированию.
Схема системы регулирования, график переходного процесса:
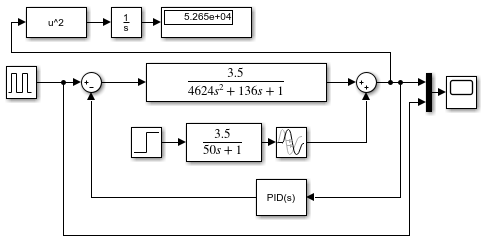
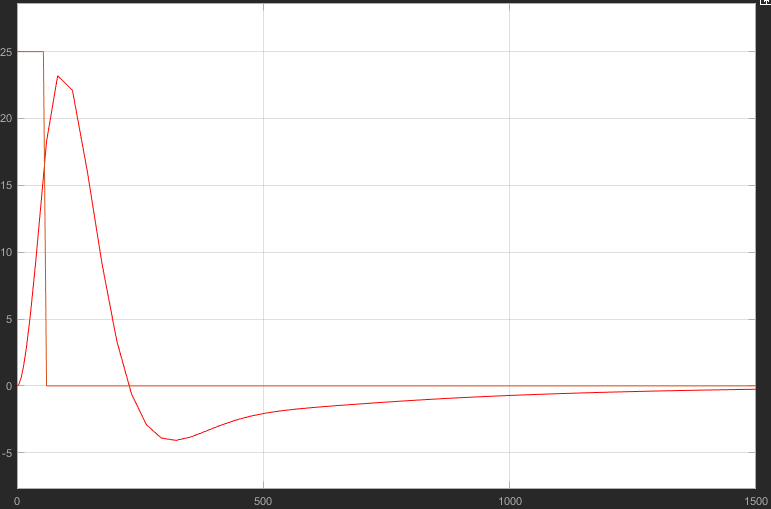
Оценим качество переходного процесса по возмущению:
I = 5265 – квадратичный интегральный критерий качества
hmax1 = 30 – амплитуда 1 колебания
hmax2 = 8 – амплитуда 2 колебания
tп = 1000 с – время переходного процесса
tmax1 = 82 с – время достижения первого экстремума
tmax2 = 260 с – время достижения второго экстремума
ω = 2π/T = 2*3,14/(260 – 82) = 0,0353 – частота переходного процесса
ξ = (ymax2 – yуст)/(ymax1 – yуст) = 0,2642 – время затухания за 1 период
ψ = (ymax1 - ymax3)/ymax1– степень затухания мы рассчитать не можем, т.к. 3-е колебание не достигается
m = -ln(1 - ψ)/2π– степень колебательности мы рассчитать не можем, т.к. она зависит от степени затухания
ВЫВОД
В данном курсовом проекте я:
1. Построил кривую разгона по импульсной характеристике и тремя разными способами определил ее передаточную функцию, выбрав из них наиболее подходящую.
2. Построил частотные характеристики объекта регулирования: АФХ, АЧХ и ФЧХ.
3. Для ПИД-регулятора определил оптимальные значения параметров настройки, обеспечивающие минимальное значение интегрального квадратичного критерия качества.
4. Рассчитал и построил КЧХ замкнутой системы относительно внешнего возмущающего воздействия.
5. Смоделировал переходной процесс в системе регулирования при внешнем возмущающем воздействии.
Построенная система АСР, взятая на основе реального объекта управления устойчива, так как в ней возможен установившийся режим, вследствие чего регулируемая величина, температура перегретого пара, будет поддерживаться на необходимом уровне.
СПИСОК ЛИТЕРАТУРЫ
-
Прохватилов В.В., Кантемиров В.И. Методические указания к выполнению курсового проекта по теории автоматического управления: Методические указания / Прохватилов В.В.,
Кантемиров В.И.– Астрахань: Изд-во АГТУ, 2007.– 35 с.
-
Стефани Е.П. Основы расчета настройки регуляторов теплоэнергетических процессов / Стефани Е.П.– М: Энергия, 1972.– 376 с.