ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.01.2024
Просмотров: 10
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Основные операции с векторными величинами.
Дабы сложить два вектора, необходимо в конец одного вектора перенести начало другого вектора. Тогда результирующий вектор будет иметь начало в точке, где начинается первый вектор, а конец – в точке, где заканчивается второй вектор.
-
Сложение векторных величин.
-
Если у векторов одинаковое направление -
Если у векторов противоположные направления -
Если векторы находятся под некоторым углом:
-
правило треугольника -
правило параллелограмма
-
Умножение векторных величин.
-
Произведение векторной величины на скалярную -
Скалярное произведение двух векторных величин -
Векторное произведение двух векторных величин
-
Проекция вектора на заданное направление.
Чтобы найти проекцию вектора на заданную координатную ось, нужно опустить перпендикуляр из конца вектора на эту ось. Получившийся отрезок, лежащий на оси, между точкой начала вектора и точкой пересечения опущенного перпендикуляра с осью, будет являться проекцией вектора на заданную ось. Если вектор расположен перпендикулярно оси, то его проекция на эту ось равна нулю. Если вектор расположен так, что его направление совпадает с направлением оси, то проекция такого вектора будет положительной. Если вектор расположен параллельно оси и его направление противоположно направлению оси, то проекция такого вектора будет отрицательной.
-
Сравнение поступательного и вращательного движения.
| № | Поступательное движение | Вращательное движение |
| 1 | При поступательном движении любая прямая, жестко связанная с телом, остается параллельной своему первоначальному направлению в процессе движения. В этом случае все точки тела движутся по одинаковым траекториям, имея в каждый момент времени одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение какой-либо одной его точки. | При вращательном движении абсолютно твердого тела относительно неподвижной оси все точки тела описывают окружности, центры которых лежат на оси вращения, а плоскости этих окружностей перпендикулярны оси вращения |
| 2 | сила  | момент силы  |
| 3 | линейная скорость  | угловая скорость  |
| 4 | линейное ускорение  = = | угловое ускорение  |
| 5 | Масса  | момент инерции J |
| 6 | импульс  | момент импульса  |
| 7 | основное уравнения поступательного движения   | основное уравнения вращательного движения   |
| 8 | работа при поступательном движении  | работа при вращательном движении  |
| 9 | кинетическая энергия поступательного движения  | кинетическая энергия вращательного движения  |
-
Составьте таблицу по силам в природе
| Сила | Формула | Определение силы или формулировка закона | Описание величин, входящих в формулу | Рисунок |
| Гравитационная |  | Сила всемирного тяготения — сила, с которой все тела притягиваются друг к другу. Закон всемирного тяготения. Сила взаимного притяжения двух тел прямо пропорциональна произведению масс этих тел и обратно пропорциональна квадрату расстояния между ними. | G = 6,67 . 10-11 -гравитационная постоянная;  – масса первого тела; – масса первого тела; – масса второго тела; – масса второго тела; – расстояние между телами. – расстояние между телами. | 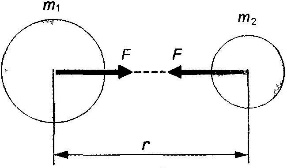 |
| Сила тяжести | Fтяж = mg | Сила взаимодействия между двумя телами массами, находящимися на расстоянии друг от друга, прямо пропорционально произведению масс этих тел и обратно пропорционально квадрату расстояния между ними. | m – масса тела; g – ускорение свободного падения (g=9,8м/с2). | |
| Вес | Р = mg Р = m(g +a) | Сила, с которой тело действует на горизонтальную опору или вертикальный подвес, вследствие земного притяжения | a – ускорение; m – масса тела; g – ускорение свободного падения (g=9,8м/с2). | |
| Сила трения | F = µN; Fтр = µmg | Сила трения - сила, возникающая при соприкосновении тел и препятствующая их относительному движению. | N – сила реакции опоры; µ – коэффициент трения безразмерная величина; g – ускорение свободного падения (g=9,8м/с2). | 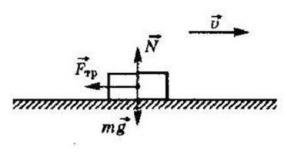 |
| Сила упругости | Fупр = k  х х | Сила, возникающая в теле в результате его деформации и стремящаяся вернуть тело в исходное положение | k – коэффициент жесткости тела; (|x| << l) сила упругости пропорциональна деформации тела и направлена в сторону | 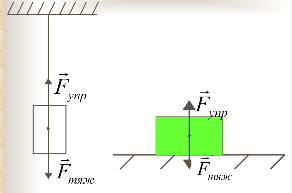 |
| Сила Архимеда | FA = PgV | На тело, которое находится в жидкости или в газообразном веществе, действует сила выталкивания, численно равная весу той жидкости или газа, которые были вытеснены телом. | P– плотность жидкости или газа; V – объем погруженной части тела; g – ускорение свободного падения (g=9,8м/с2); m- масса тела | 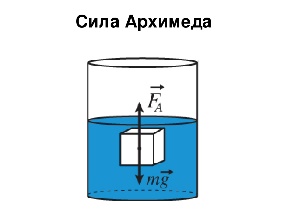 |
| Равнодействующая сила | R=  ; ; | Называют такую силу, которая сообщала бы телу такое же ускорение, как и векторная сумма всех сил, действующих на тело. |  -сила -сила | 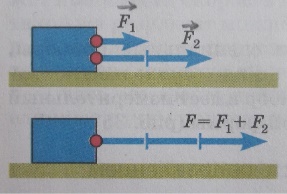 |
| Центробежная сила |  | Возникает при движении по окружности и направлена по радиусу из центра. | ʋ – линейная скорость; r – радиус окружности; m – масса | 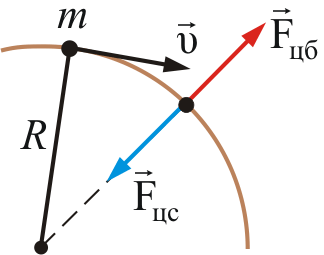 |
| Сила Кулона | F=  | Взаимодействия двух точечных неподвижных заряженных тел в вакууме направлена вдоль прямой, соединяющей заряды, прямо пропорциональна произведению модулей зарядов и обратно пропорциональна квадрату расстояния между ними. | q1 и q2 – взаимодействующие заряды; r – расстояние между зарядами; k – коэффициент пропорциональности | 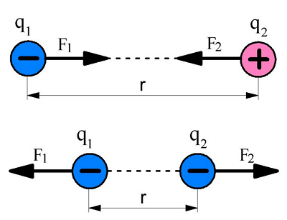 |
| Сила Ампера | FА = IBlsin | Сила, действующая на проводник с током, помещенный в однородное магнитное поле, пропорциональна длине проводника, вектору магнитной индукции, силе тока и синусу угла между вектором магнитной индукции и проводником. Направление этой силы можно определить по правилу левой руки | I – сила тока в проводнике; В – магнитная индукция; l –длина проводника; |  |
| Сила Лоренца | F = qvBsin | Сила, действующая на точечную заряженную частицу, движущуюся в магнитном поле. Она равна произведению заряда, модуля скорости частицы, модуля вектора индукции магнитного поля и синуса угла между вектором магнитного поля и скоростью движения частицы. | q – величина заряда; v – скорость движения заряженной частицы; В – магнитная индукция; | 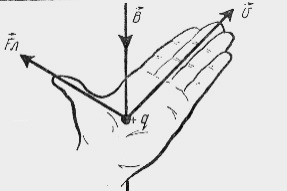 |