ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.07.2024
Просмотров: 54
Скачиваний: 0
|
N
|
 umPages
NumPages NumPages NumPages 33 33 33 33 33 33 33 33 33 0 0 33
33 33 33 33
umPages
NumPages NumPages NumPages 33 33 33 33 33 33 33 33 33 0 0 33
33 33 33 33

Фгбоу впо «кгта им. В.А. Дегтярева»
Кафедра АиУ
Отчет
по производственной практике
|
Выполнил: |
Разбирин А.В. |
|
Руководитель от академии: |
Антошина Е.А. |
|
Руководитель от предприятия: |
Потапов А.Ф. |
Ковров 2014 г.
Оглавление
1. Реферат 3
2. Конструкторская часть 4
3. Технологическая часть 15
4. Аннотация 28
5. Список литературы 29
Приложение А
1. Реферат
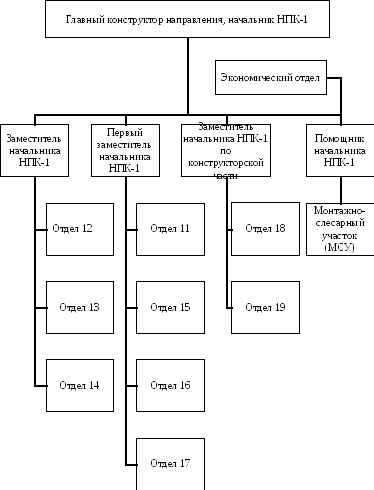
В ходе прохождения производственной практики в ОАО «ВНИИ Сигнал» была установлена следующая структура НПК-1:
2. Конструкторская часть
2.1 Описание и работа изделия ПН46Т
2.1.1 Назначение
Изделие ПН46Т АЮИЖ.461963.002 предназначено для наведения ВЧ изделия 2Х51 в горизонтальной плоскости и КЧ изделия 2Х51 в вертикальной плоскости приводами ГН и ВН соответственно.
Приводы обеспечивают:
- полуавтоматическое наведение ВЧ и КЧ пультом управления;
- автоматическое наведение КЧ и ВЧ на задаваемые углы, а также восстановление углов наведения КЧ и ВЧ при сбивании наводки;
- торможение и ограничение движения КЧ на предельных углах наведения;
- автоматическую сбивку наводки по ГН от 0 до 20 (д.у.) в произвольном направлении;
- самоблокировку приводов ВН и ГН и блокировку изделия 22Б во время имитации ударных нагрузок.
Электропитание изделия ПН46Т осуществляется от источника питания постоянного тока напряжением (26±2) В.
Изделие ПН46Т может эксплуатироваться в диапазоне температур окружающего воздуха от минус 10 до + 40 0С, после пребывания при температурах окружающего воздуха от минус 60 до + 450С, при относительной влажности до 98% с температурой окружающего воздуха до +250С. Технические характеристики изделия ПН46Т обеспечиваются при следующих параметрах нагрузки:
- для привода ВН:
- суммарном статическом моменте не более 2500 Н·м;
- моменте инерции не более 600 кг·м2;
- передаточном числе механической передачи 4800 ±100;
- КПД механической передачи не менее 0,2;
- мертвом ходе механической передачи, приведенном к валу нагрузки,
не более 1,5 д.у.
- для привода ГН:
- суммарном статическом моменте не более 3,2 Н·м;
- моменте инерции не более 5,5 кг·м2;
- передаточном числе механической передачи 2250 ±50;
- КПД механической передачи не менее 0,2;
- мертвом ходе механической передачи, приведенном к валу нагрузки, не более 1,5 д.у.
2.1.2 Технические характеристики
Основные технические характеристики изделия ПН46Т приведены
в таблице 1.1
Т а б л и ц а 2.1
|
Наименование |
Значение |
|
Диапазон углов наведения: - по ВН, …о - по ГН, …о |
от минус 4 до +70 от 0 до 360 |
|
Максимальная статическая ошибка в режиме АВТ: - привода ВН, д.у., не более - привода ГН, д.у., не более |
0,5 0,5 |
|
Время восстановления наводки в режиме АВТ: - при сбивке до 4 д.у. приводом ВН, с, не более - при сбивке до 9 д.у. приводом ГН, с, не более |
3 3 |
|
Время отработки угла рассогласования 30° (500 д.у.) в режиме АВТ: - по ВН, с, не более - по ГН, с, не более |
10 10 |
Продолжение таблицы 2.1
|
Наименование |
Значение |
|
Скорость наведения в режиме ПАВ: - привода ВН: - минимальная, о/с, не более - максимальная, о/с, не менее - привода ГН: - минимальная, о/с, не более - максимальная, о/с, не менее |
0,04 5,0
0,075 10 |
|
Приводы ВН и ГН обеспечивают блокировку движения по алгоритму работы изделия 2Х51 |
|
|
Время готовности к работе, с, не более |
10 |
|
Максимальная продолжительность непрерывной работы, ч |
8 |
|
Продолжительная потребляемая мощность , кВт, не более |
5 |
|
Масса изделия ПН46Т , кг, не более |
330 |
2.1.3 Состав изделия ПН46Т
В состав изделия ПН46Т входят сборочные единицы, которые являются общими для приводов ВН и ГН, и сборочные единицы, которые входят только в один из приводов.
Общими сборочными единицами для привода ГН и привода ВН являются блок управления и пульт управления.
Привод ГН состоит из следующих сборочных единиц:
- блок сопряжения;
- электродвигатель ДПР-62-Н1-02;
- датчик обратной связи.
Привод ВН состоит из следующих сборочных единиц:
- усилитель ЭМУ-2;
- электродвигатель МИ-2;
- датчик обратной связи;
- коробка распределительная вторая;
- ограничитель.
С каждым изделием ПН46Т поставляется ЗИП-О, в состав которого входят следующие запасные части и инструменты:
- блок сопряжения - 1 шт;
- блок управления – 1 шт;
- пульт управления - 1 шт;
- датчик обратной связи – 2 шт;
- коробка распределительная вторая - 1 шт;
- ограничитель - 1 шт;
- электродвигатель ДПР-62-Н1-02 – 1 шт;
- электродвигатель МИ-2 – 1 шт;
- усилитель ЭМУ-2 – 1 шт;
- вставка плавкая ВП1-1 3,15 А– 10 шт;
- вставка плавкая ВП1-1 2 А– 5 шт;
- чехол– 4 шт;
- отвертка 7810-0908 3 А Кд15 хр ГОСТ 17199-88 – 1 шт;
- отвертка 7810-0928 3 В Кд15 хр ГОСТ 17199-88 – 1 шт.
С каждым изделием ПН46Т поставляется эксплуатационная документация:
- паспорт ПН46Т ПС;
- руководство по эксплуатации ПН 46Т РЭ.
2.1.4 Устройство и работа изделия ПН46Т
Соединение составных частей изделия ПН46Т между собой и с составными частями изделия 2Х51 показаны на электрической структурной схеме, представленной на рисунке 1.
Включение приводов ВН и ГН осуществляется независимо друг от друга и в любой очередности.
Режим работы АВТ или ПАВ общий для обоих приводов.
Выключаются приводы одновременно.
Наведение КЧ осуществляется ИД ВН, управляемым ЭМУ, приводной двигатель которого через коробку распределительную подключен к силовому питанию +27 В. Управляющий сигнал для ЭМУ формируется в блоке управления путем преобразования сигналов управления с изделия 22Б и АУ 1В169Т, пульта управления и ТГ ВН, механически связанного с валом ИД ВН.
Привод ВН работает в режимах АВТ и ПАВ.
В режим АВТ сигнал управления приводом поступает или с индуктивного датчика изделия 22Б, механически связанного с осью цапф КЧ, или от АУ 1В169Т.
В режиме ПАВ наведение КЧ осуществляется поворотом ручек ПУ. На предельных углах наведения торможение КЧ производится сначала электрически приводом по сигналу ограничителя, а потом механически о жесткие упоры изделия 2Х51.
Для наведения ВЧ предназначен ИД ГН, управляемый усилителем в блоке сопряжения, который включается автоматически при запуске привода ГН. Управляющий сигнал для усилителя формируется в блоке управления путем преобразования сигналов управления от АУ 1В169Т, пульта управления и ТГ ГН, механически связанного с валом ИД ГН.
Привод ГН работает в режимах АВТ и ПАВ.
В режиме АВТ сигнал управления приводом поступает от АУ 1В169Т. При поступлении с БУ изделия 2Х51 сигнала “Откат” в блоке сопряжения с помощью узла СН ГН формируется сигнал управления приводом для обеспечения сбивки наводки ВЧ на угол в диапазоне от 0 до 20 д.у. Направление поворота ВЧ при сбивке случайное.
В режиме ПАВ наведение ВЧ осуществляется поворотом корпуса ПУ.
Алгоритм работы изделия ПН46Т, электрическая функциональная схема которого приведена на рисунке 2, заключается в следующем:
При включении тумблера “ПИТАНИЕ” на ПУ напряжение +27 В поступает в БУ на элементы коммутации и на вторичный источник питания, преобразующий его в стабилизированные напряжения ±15 В.
При нажатии кнопки “ВН” на ПУ срабатывает реле Квн блока управления, которое шунтирует эту кнопку и одновременно включает распределительную коробку, обеспечивающую запуск ЭМУ. О готовности привода ВН сигнализирует загорание индикатора “ВН” на ПУ.
При нажатии на ПУ кнопки “ГН” срабатывает реле Кгн блока управления, которое шунтирует эту кнопку и одновременно включает блок сопряжения. О готовности привода ГН сигнализирует загорание индикатора “ГН” на ПУ. После включения приводов ВН и ГН возможно наведение КЧ и ВЧ в полуавтоматическом режиме с помощью ПУ. В этом случае на входы сумматоров ПАВ поступают сигналы с управляющих потенциометров ПTВН и ПTГН и ООС по скорости с ТГ ВН и ТГ ГН.
При повороте ручек ПУ «на себя» или «от себя» от исходного положения с выхода управляющего потенциометра ПТ ВН снимается сигнал управления в виде напряжения постоянного тока величиной от минус 11 до +11 В, пропорциональный углу отклонения, который через сумматор ПАВ, контакты реле Кпав вн и схему торможения поступает на вход широтно-импульсного модулятора. В зависимости от знака и величины управляющего сигнала изменяется напряжение на выходе ЭМУ, скорость вращения ИД ВН и направление движения КЧ. При неизменном входном сигнале КЧ движется с постоянной скоростью до момента срабатывания ограничителя на предельных углах наведения. Для остановки КЧ необходимо плавно отпустить ручки ПУ, которые автоматически возвращаются в исходное положение.
Алгоритм работы привода ГН аналогичен работе привода ВН за исключением того, что для поворота КЧ необходимо повернуть корпус ПУ в нужную сторону, при этом вместо ЭМУ работает усилитель в блоке сопряжения и вращение ВЧ производится без ограничения.
Для перевода включенных приводов ВН и ГН в автоматический режим работы необходимо перевести тумблер “РЕЖИМ” на ПУ в положение “АВТ”, при этом должен погаснуть индикатор “ПАВ” и загореться индикатор “АВТ”.
При отсутствии сигнала ГДУ ВН от АУ 1В169Т привод ВН отрабатывает сигнал рассогласования с датчика угла изделия 22Б. Сигнал выпрямляется фазочувствительным выпрямителем и через замкнутые контакты реле Кгду вн и регулировочный резистор “ОШИБКА ВН” вместе с сигналом ООС по скорости и сигналом, пропорциональным интегралу от сигнала рассогласования, поступает на сумматор, а потом через контакты реле Кпав вн и схему торможения на вход ШИМ и далее на обмотки управления ЭМУ. На выходе ЭМУ вырабатывается напряжение постоянного тока, достаточное для вращения ИД ВН в направлении уменьшения сигнала рассогласования до полной остановки.