Файл: Лабораторная работа 7 Исследование адаптивной системы компенсации помехи Бригада 4 Выполнили студенты гр. Рс02 Фатеев Алексей.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.01.2024
Просмотров: 38
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство цифрового развития, связи и массовых коммуникаций РФ Федеральное государственное бюджетное образовательное учреждение высшего образования
«Сибирский государственный университет телекоммуникаций и информатики» (СибГУТИ)
Кафедра РТУ и ТБ
ЛАБОРАТОРНАЯ РАБОТА №7
«Исследование адаптивной системы компенсации помехи»
Бригада № 4
Выполнили: студенты гр. РС-02
Фатеев Алексей
Андросов Юрий
Проверил: преподаватель
Архипов Сергей Николаевич
Новосибирск, 2022
Цель работы:
Исследование принципа функционирования адаптивной системы автоматического регулирования на примере двухканального компенсатора помехи, работающего по критерию минимума среднего квадрата ошибки.
Лабораторная установка
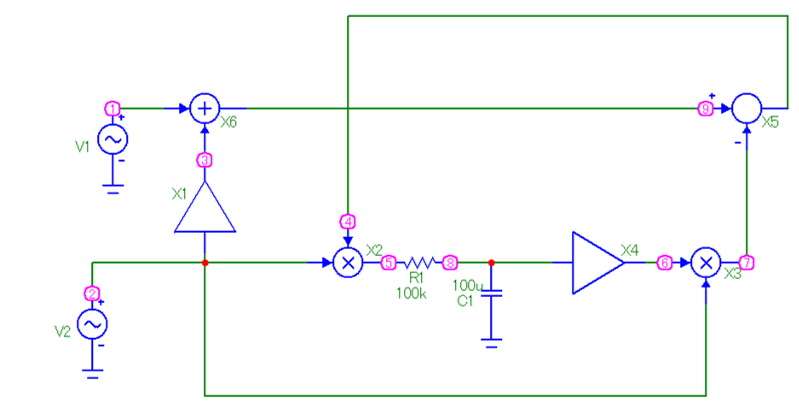
Рисунок 1 – Схема адаптивного компенсатора в формате Micro Cap
Ход работы:
-
Получим осциллограмму суммы полезного сигнала и помехи:
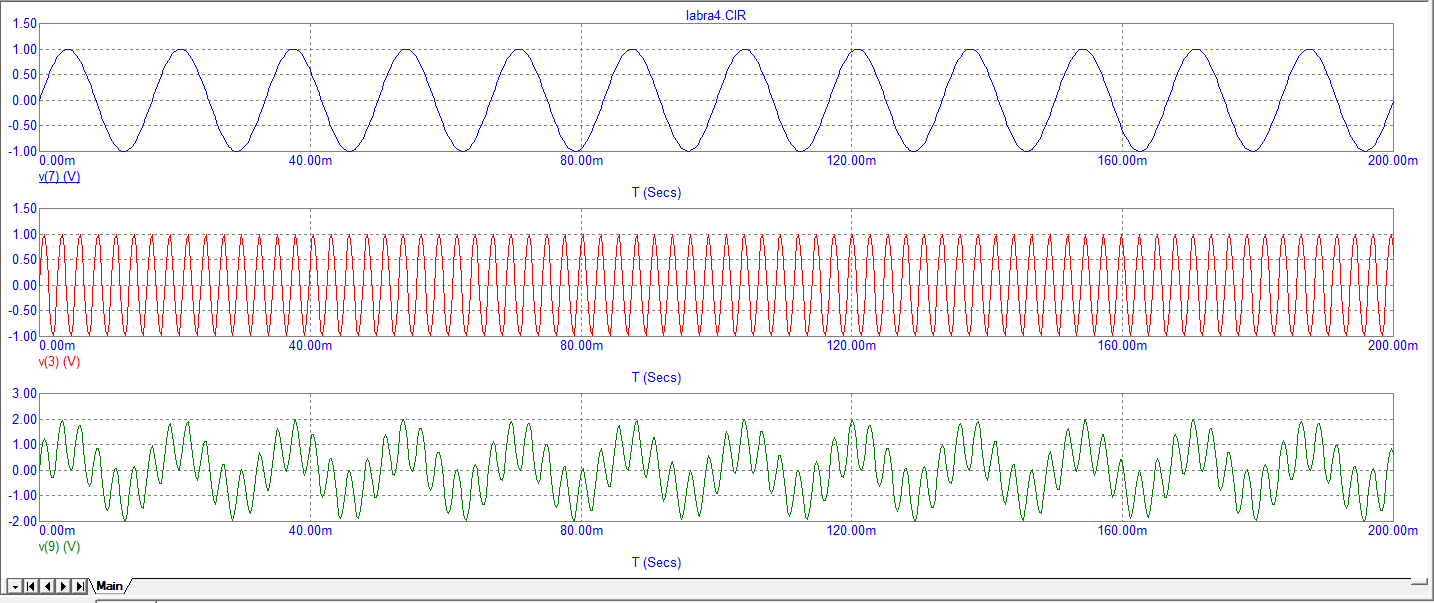
Рисунок 2 – Осциллограммы полезного сигнала, помехи и их суммы
Из третей осциллограммы (рисунок 1) видно, что при подаче на вход суммы сигнала и помехи существенно искажена форма полезного сигнала.
-
Избавимся от этих искажений с помощью интегратора. Интегратор построен на интегрирующей цепочке R1,С1 и усилителе с коэффициентом усиления 104
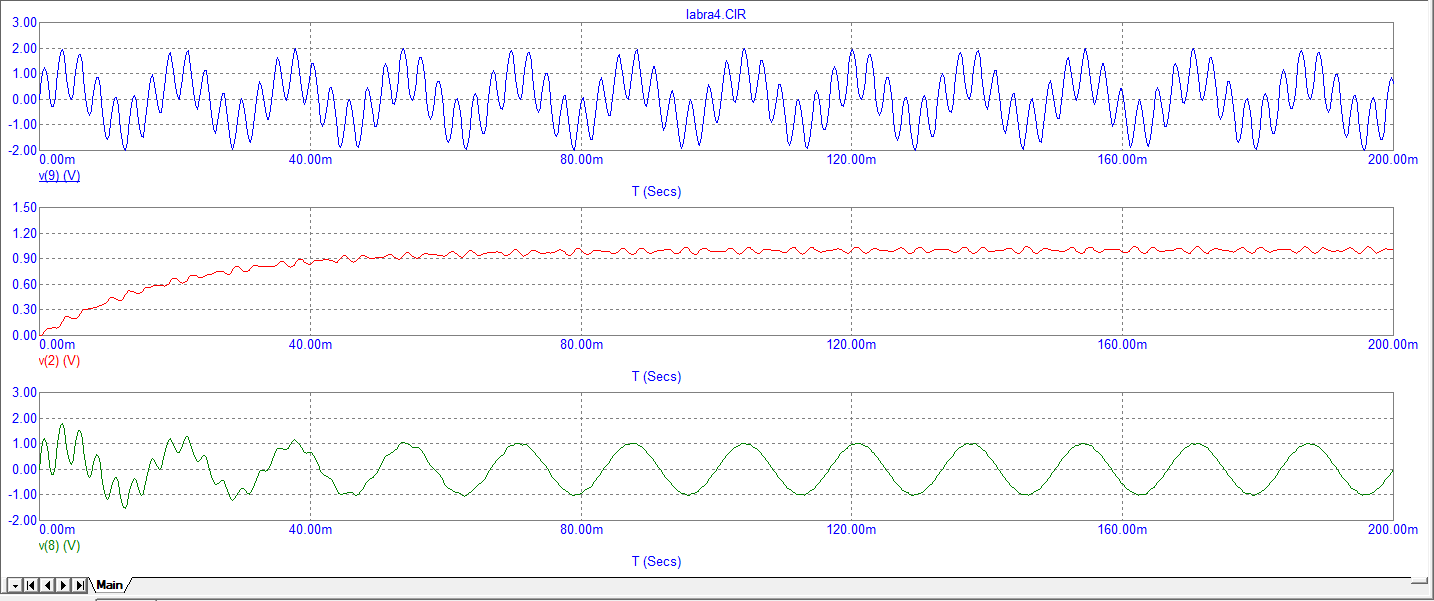
Рисунок 3 – Осциллограммы суммы полезного сигнала и помехи,
изменения весового коэффициента и сигнала на
выходе адаптивного компенсатора (при R1=100 кОм)
Скорость накопления заряда в интеграторе (время регулирования) зависит от постоянной времени цепи τ = R1*С1.
Постоянная времени цепи:
τ = 100*
 10 с
10 сВремя регулирования:

-
Изменим величину постоянной времени (изменив R1) и посмотрим как изменилось время регулирования и форма выходного сигнала:
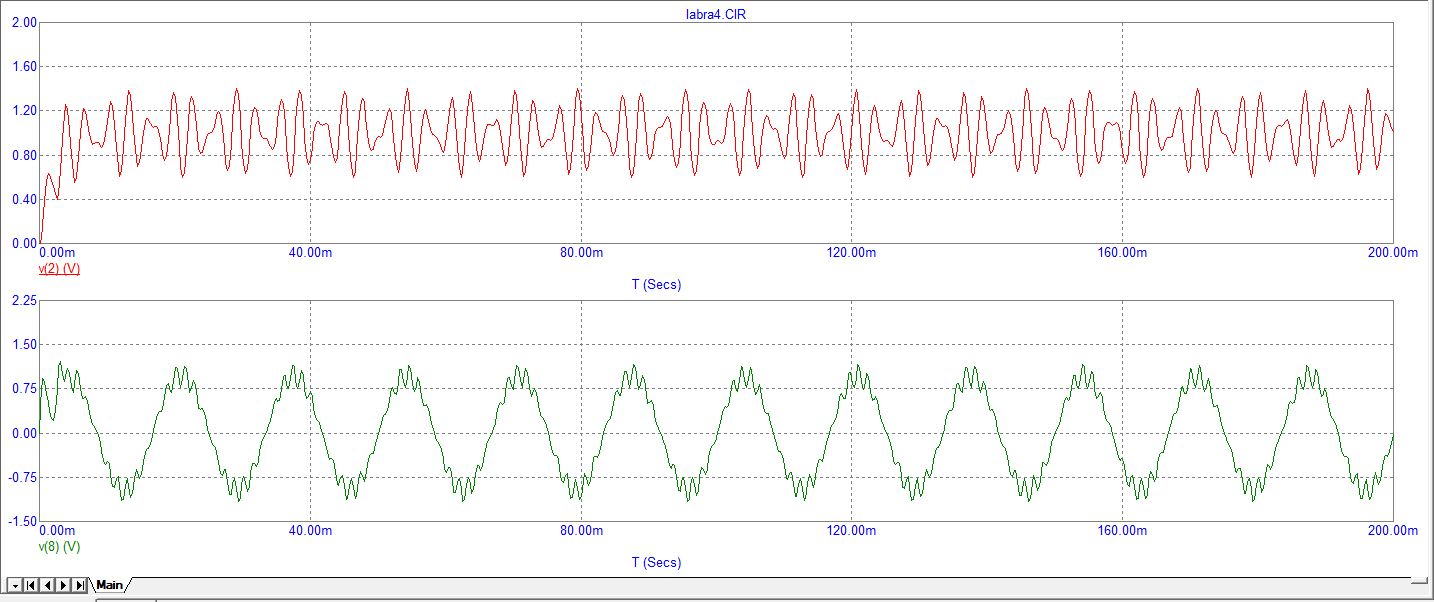
Рисунок 3 – Осциллограммы изменения весового коэффициента и сигнала на
выходе адаптивного компенсатора (при R1=10 кОм)
Постоянная времени цепи:
τ = R1*C1 = 10*
 1 с
1 сВремя регулирования:

-
Вновь изменим величину постоянной времени (изменив R1) и посмотрим как изменилось время регулирования и форма выходного сигнала:
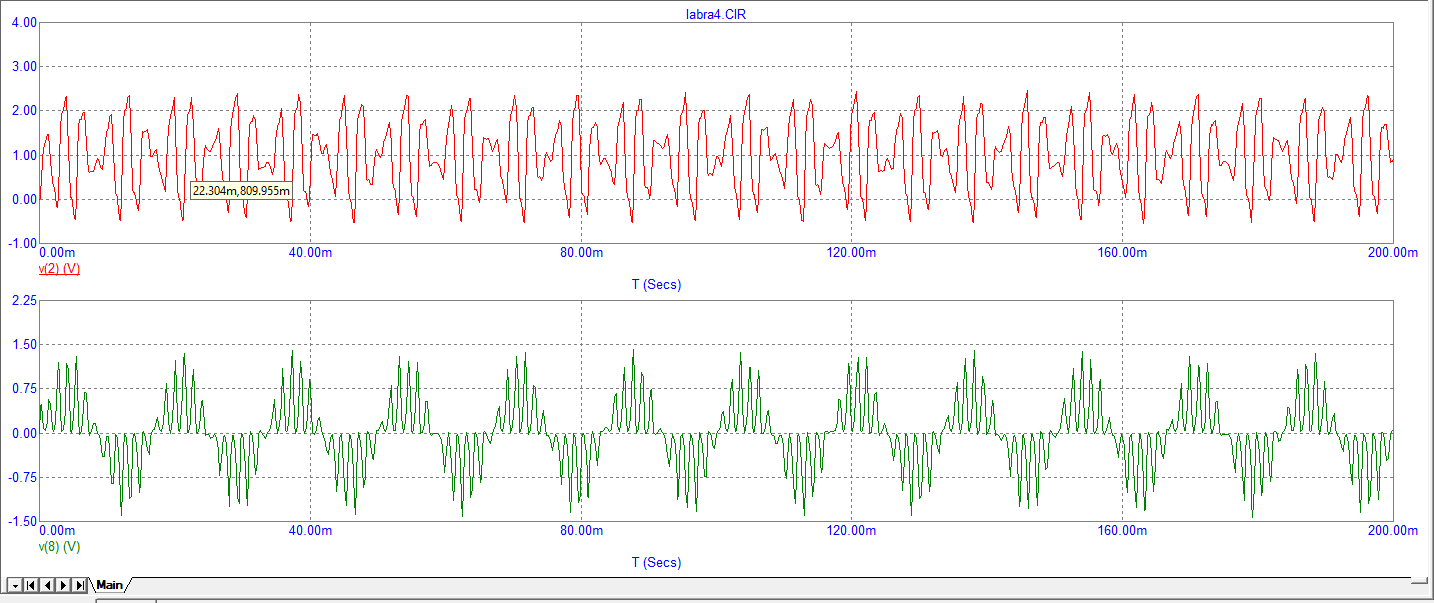
Рисунок 4 – Осциллограммы изменения весового коэффициента и сигнала на
выходе адаптивного компенсатора (при R1=1 кОм)
Постоянная времени цепи:
τ = R1*C1 = 1*
0.1 сВремя регулирования:

-
Построим зависимость времени регулирования при изменении постоянных времени интегратора.
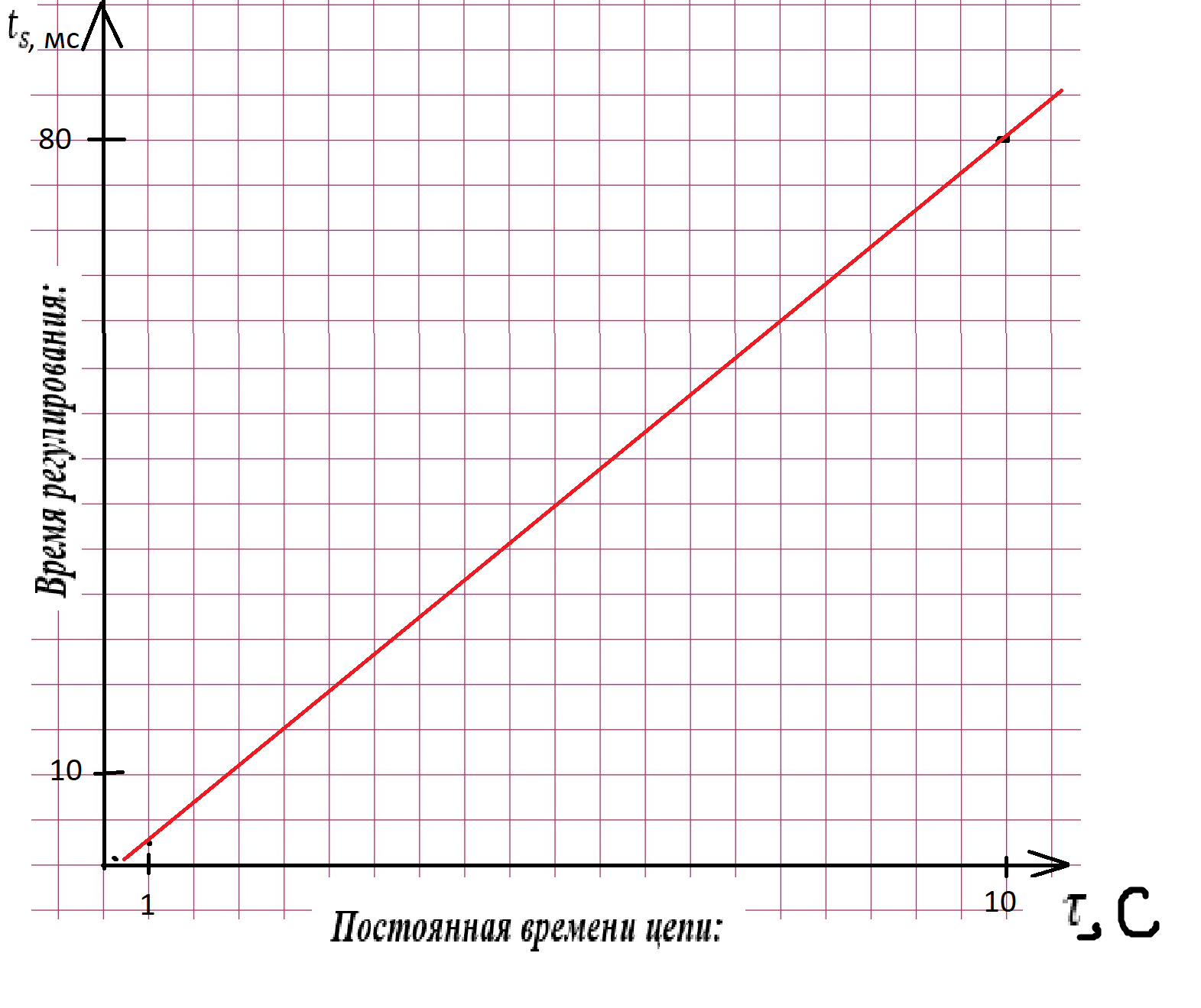
Рисунок 5 – Зависимость времени регулирования от постоянной времени
Вывод: В процессе выполнения данной лабораторной работы было выяснено, что величина весового коэффициента изменяется с течением времени, то есть стремиться к установившемуся значению и форма сигнала на выходе (после прохождения интегратора) приближается к идеальной, т.е. происходит компенсация помехи за счет изменения коэффициента усиления регулируемого усилителя. (Из рисунка-3)
С помощью построенного графика можно сделать вывод, что при уменьшении постоянной времени цепи уменьшается время регулирования (что является плюсом, т.к форма сигнала на выходе приближается к идеальной только лишь по прошествии времени регулирования.) Но при малом времени регулирования форма выходного сигнала совсем не похожа на входной сигнал (что является минусом).
Из всего вышесказанного можно сделать вывод, что для нормальной работы интегратора постоянная времени цепи должна быть много больше чем время регулирования
, в противном случае сигнал на выходе интегратора не будет похож на входной сигнал.