Файл: График (план) Производственная (Преддипломная) практика обучающегося группы ххх Шифр и группы Фамилия, имя, отчество обучающегося Содержание практики.docx
Добавлен: 12.01.2024
Просмотров: 441
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Система управления температурой, представленная на рисунке 13, представляет собой микроконтроллер, к которому подключен датчик температуры, два двухпиновых вентилятора, расположенные в разных концах разрабатываемого инкубатора и лампы накаливания мощностью 40 Вт, подключенной непосредственно к сети 220 В. Первый вентилятор выполняет функцию обдува лампы, второй – охлаждения. Питание вентиляторов осуществляется посредством блока питания. Управление включение/выключением лампы и вентиляторов осуществляется через релейный модуль.
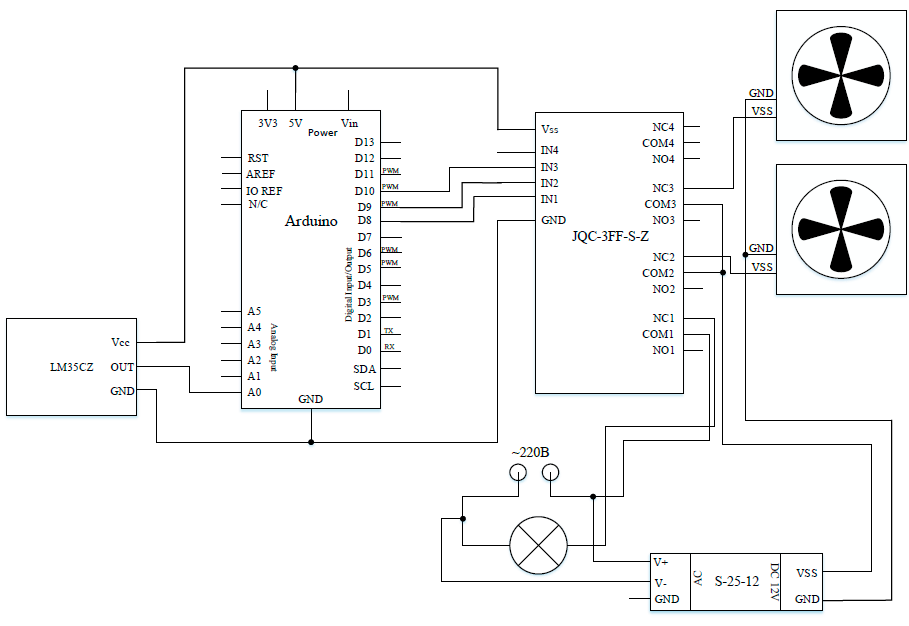
Рисунок 13 – Система управления температурой
При работе с Arduino, наиболее распространенными являются датчики температуры и влажности семейства DHT. Самыми популярными представителями серии являются датчики DHT11, DHT22 и DHT21, представленные на рисунке 14. Они состоят из термистора и емкостного датчика влажности. Цифровой сигнал, исходящий от находящегося внутри датчика чипа позволяет считывать температуру и влажность воздуха, после чего возможна обработка этих значений.
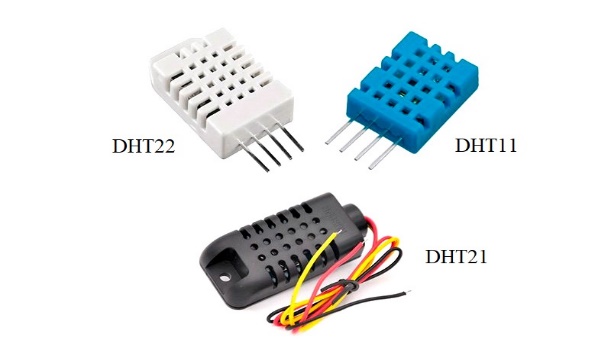
Рисунок 14 – Датчики DHT11, DHT22 и DHT21
Сравнение датчиков по основном показателям приведено в таблице 9.
Таблица 9 – Сравнение основных показателей датчиков DHT11, DHT21 и DHT22
| Показатель | Единица измерения | DHT11 | DHT22 | DHT21 |
| Диапазон измерения влажности | % | 20 ÷-90 | 0 ÷100 | 0 ÷ 100 |
| Точность измерения влажности | % | 5 | 2 | 3 |
| Минимальный период измерений | сек | 2 | 2 | 2 |
| Цена | руб. | 190,00 | 380,00 | 440,00 |
Поскольку значения влажности воздуха в инкубаторе на последнем этапе инкубации может достигать значения в 90%, то, исходя из приведенной сравнительной таблицы, наилучшим выбором является датчик температуры и влажности DHT22, полные характеристики которого представлены в таблице 10.
Таблица 10 – Характеристики DHT22
| Наименование характеристики | Единица измерения | Значение |
| Питание | - | 3,3 ÷ 6В постоянного тока |
| Потребляемый ток во время изменений | мА | 1 ÷ 1,5 |
| Потребляемый ток в режиме ожидания | мА | 40 ÷ 50 |
| Диапазон измерения влажности | % | 0 ÷ 100 |
| Диапазон измерения температуры | °С | -40 ÷ +80 |
| Точность измерения влажности | % | 2 |
| Точность измерения температуры | °С | 0,5 |
| Частота измерений | Гц | 0,5 |
| Выходной сигнал | - | Цифровой на однопроводной шине SDA |
Датчик температуры и влажности DHT22 состоит из NTC-термистора, чувствительного емкостного датчика и 8-битного чипа, преобразующего аналоговый сигнал с датчиков в цифровой на выходе. Калибровка датчиков происходит в калибровочной камере на этапе изготовления, поправочный коэффициент сохраняется в памяти и вызывается при считывании данных. Микроконтроллер выступает в роли ведущего устройства, то есть отвечает за инициирование связи. DHT22 всегда остается в качестве подчиненного устройства. Алгоритм протокола передачи данных представлен на рисунке 15.
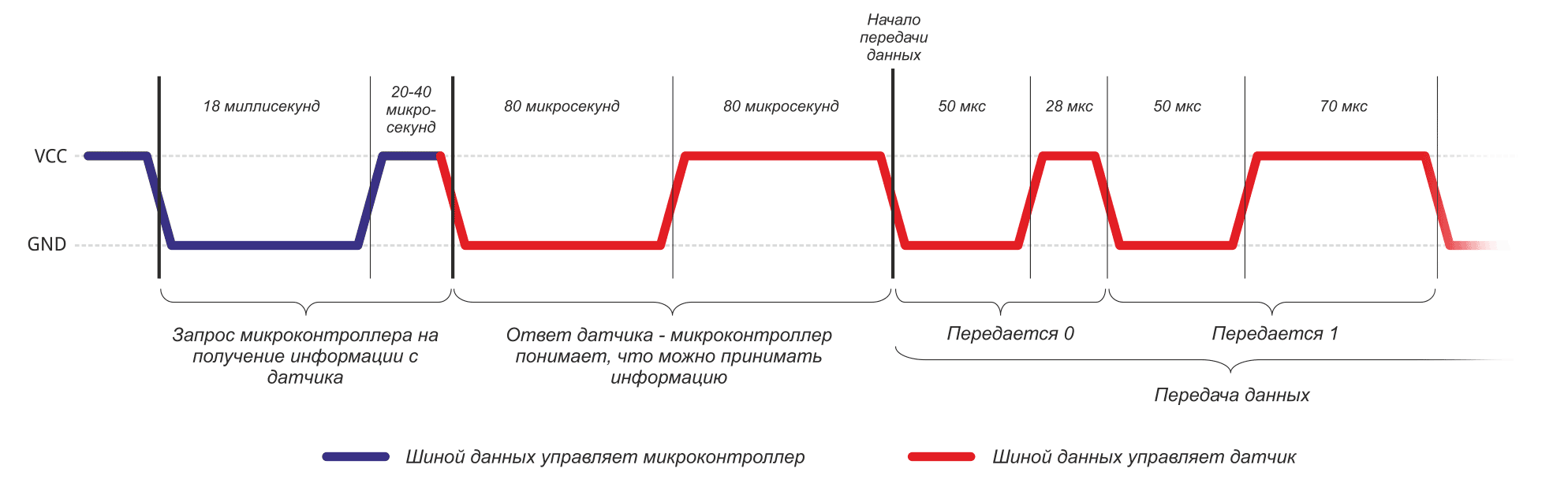
Рисунок 15 – Протокол передачи данных с DHT22
-
Подача стартового сигнала с микроконтроллера – происходит прижимание шины к земле на 18-20 мсек. -
Контроллер отпускает и следить за уровнем на ней около 20-40 мсек. -
Обнаружив сигнал, датчик дожидается, пока уровень снова станет высоким и сам прижимает шину к земле на 80 мсек, в это время происходят измерения и преобразования результатов. -
DHT22 отпускает линию на 80 мсек, тем самым указывая на то, что он готов к отправке данных -
Происходит отправка 40 бит данных. Перед отправкой каждого бита датчик прижимает шину к земле на 50 мсек, за которым следует 26-28 мсек для «0» или 70 мсек для «1» -
Завершение связи, линия вытягивается подтягивающим резистором и переходит в состояние ожидания
Первостепенно при передаче данных, датчик температуры и влажности отправляет старший значащий бит. Целиком пакет данных составляет 5 байт. 2 первых байта передают целое и дробное значения влажности, следующие за ними 2 байта, передают целое и дробное значения температуры, и последний байт – байт четности, равный сумме предыдущих байт [10, 11].
Для повышения уровня влажность в разрабатываемом инкубаторе используется трехпиновый вентилятор Gembird FANCASE, установленный над резервуаром с водой, с целью повышения скорости испарения жидкости. Характеристики выбранного вентилятора представлены в таблице 11.
Таблица 11 – Характеристики вентилятора Gembird FANCASE
| Наименование характеристики | Единица измерения | Значение |
| Тип подшипника | - | скольжения |
| Рабочее напряжение | В | 12 |
| Ток | А | 0,3 |
| Частота вращения | об/мин | 2500 |
| Шум | дБ | 27 |
| Размеры рамы | мм | 120×120 |
| Толщина | мм | 25 |
DHT22 имеет четыре контакта, три из которых используются для подключения к микроконтроллеру Arduino. Первый контакт Vcc подсоединяется непосредственно к пину 5V Arduino. Второй, SDA, к выходу 4 на плате и к питанию через подтягивающий резистор номиналом 10 кОм. Четвертый выход, GND подсоединяется к аналогичному выходу платы Arduino. Выходы GND и Vcc соединены между собой через сглаживающий конденсатор номиналом 100нФ. Выбранный вентилятор имеет три вывода, два из которых используются для питания мотора, а третий используется для управления скоростью вращения лопастей. Для использования в разрабатываемой системе достаточно подключения двух выходов к контактам управляющего релейного модуля через блок питания, так как для реализации поставленных задач достаточно управления замыканием/размыканием цепи. Схема системы управления влажностью продемонстрирована на рисунке 16.
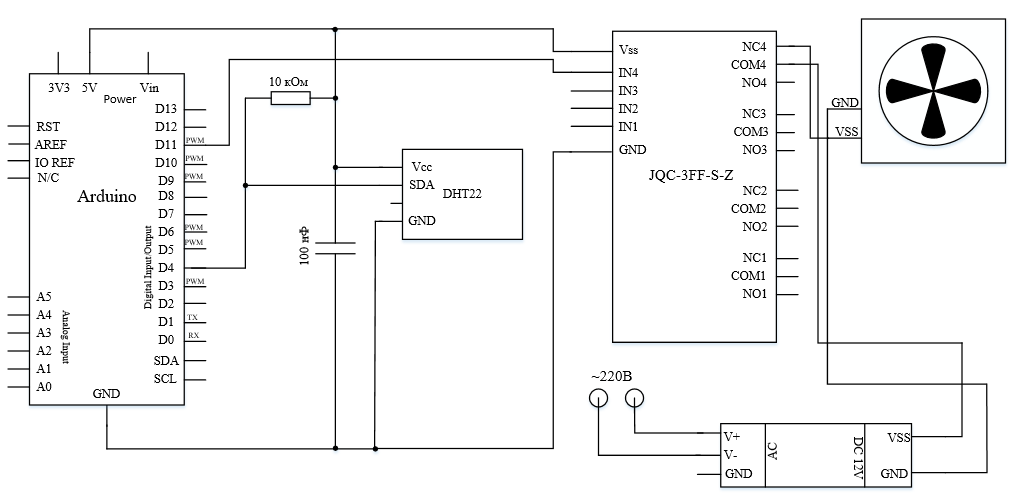
Рисунок 16 – Система управления влажностью
Управление поворотом лотков заданной системы осуществляется с помощью сервопривода. Сервопривод – это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Иными словами, сервопривод - это механизм с электромотором, способный осуществить поворот в заданный угол и сохранять это положение.
Любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.д.) и блок управления приводом является сервоприводом. Блок управления осуществляет автоматическую поддержку необходимых параметров на датчике и устройстве согласно заданному внешнему воздействию.
Принцип действия сервопривода:
1) сервопривод получает на вход значение управляющего параметра;
2) блок управления сравнивает это значение со значение на своем датчике;
3) основываясь на результате сравнения, привод производит некоторое действие, например, поворот, до тех пор, пока значение с внутреннего датчика не станет максимально близко к значению внешнего управляющего параметра.
Структурная схема сервопривода представлена на рисунке 17.
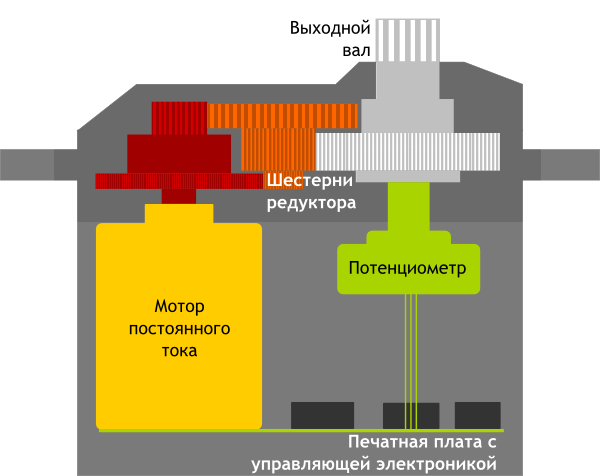
Рисунок 17 – Структурная схема сервопривода
Привод представляет собой электромотор с редуктором. Для преобразования электричества в механически поворот используется электромотор. Для понижения скорости вращения мотора необходим редуктор, представляющий собой механизм из шестерней, передающий и преобразующий крутящий момент. Поворот выходного вала – конечной шестерни сервопривода – осуществляется включением и выключением электромотора. Однако для контроля положения устройства необходим датчик обратной связи – энкодер, преобразующий угол поворота обратно в электрический сигнал. Как правило, для этой цели используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом происходит установка текущего положения механизма. Помимо рассмотренных элементов, в сервоприводе присутствует управляющая электроника, отвечающая за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Именно она отвечает за поддержание отрицательной обратной связи.
Сервопривод имеет три выхода, два из которых отвечают за питание мотора, третий – за передачу управляющего сигнала, используемого для выставления положения устройства. Управляющий сигнал представляет собой импульсы постоянной частоты и переменной ширины. Рисунок 18 иллюстрирует управляющие импульсы для трех положений сервопривода.
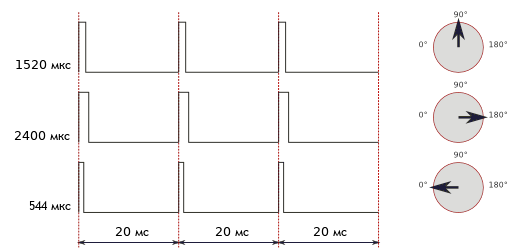
Рисунок 18 – Управляющие импульсы для трех положений сервопривода
Положение сервопривода определяет длина импульса. При поступлении сигнала в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительности различны, включается электромотор. Направление вращения определяется тем, какой из этих двух импульсов короче. При равенстве двух импульсов, электромотор останавливается. В большинстве сервоприводов, используемых с микроконтролерами Arduino, импульсы производятся с частотой 50 Гц, то есть период испускания и приема импульсов 20 мсек. Как правило, при этом длительность импульса в 1520 мсек означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса побуждает сервопривод к повороту по часовой или против часовой стрелки соответственно. При это существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мсек – для 0° и 2400 мсек – для 180°. Существует погрешность, допускаемая на производстве, приводящая к тому, что рабочий диапазон длин импульсов немного отчается даже в пределах одной модели, поэтому для точной работы устройства необходима калибровка. Осуществляется калибровка путем экспериментального подбора корректного диапазона для каждого конкретного устройства.
Стоит отметить, что способ управления сервоприводами называется PDM (Pulse Duration Modulation) или PPM (Pulse Position Modulation). При этом способе крайне важна длина импульсов и гораздо меньше – частота их появления. Нормой является частота в 50 Гц, но устройство будет работать корректно и при 40 Гц, и при 60 Гц. Нужно иметь ввиду, что при сильном уменьшении частоты сервопривод может работать урывками и на пониженной мощности, а при сильном завышении может перегреться и выйти из строя.
К характеристикам сервоприводов относятся: крутящий момент и скорость поворота.
Крутящий момент – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы, характеризует вращательное действие силы на твердое тело. Эта характеристика показывает массу груза, который сервопривод способен удержать на рычаге заданной длины. Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода для поворота на заданный угол. Наиболее часто используемая единица измерения скорости сервоприводов – время/угол. Как правило, чем выше скорость поворота сервопривода, тем меньше крутящий момент, и наоборот.