Файл: График (план) Производственная (Преддипломная) практика обучающегося группы ххх Шифр и группы Фамилия, имя, отчество обучающегося Содержание практики.docx
Добавлен: 12.01.2024
Просмотров: 439
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Официальной классификации сервоприводов по размерам не существует, однако производители выделяют три основные группы с общепринятым расположением крепежных элементов. Характерные габариты для каждой из этих групп представлены в таблице 12.
Таблица 12 – Классификация сервоприводов по габаритам
| Габарит | Вес, г | Линейные размеры, мм |
| Маленькие | 8 ÷ 25 | 22×15×25 |
| Стандартные | 40 ÷ 80 | 40×20×37 |
| Большие | 50 ÷ 90 | 49×25×40 |
Процент сервоприводов, не попадающих в эту классификацию крайне мал.
Исходя из различий внутреннего интерфейса, сервоприводы можно разделить на аналоговые и цифровые.
Различия сервоприводов заключается в способе обработки импульсов и управлении мотором. Для принятия и анализа импульсов, а также управления мотором цифровые сервоприводы используют микропроцессор, в отличие от аналоговых. Сервоприводы и первого, и второго типа принимают одинаковые управляющие импульсы, после этого аналоговый сервопривод принимает решение, нужно ли менять положение, и, в зависимости от результата, посылает или нет сигнал на мотор. Как правило, это происходит с частотой в 50 Гц. Таким образом, минимальное время реакции – 20 мсек, в течение которого любое внешнее воздействие способно повлиять на положение сервопривода. Также недостатком является то, что в состоянии покоя на электромотор не подается напряжение и при небольшом отклонении от равновесия на электромотор подается короткий сигнал малой мощности. Мощность этого сигнала пропорциональна величине отклонения, поэтому при малых отклонениях сервопривод не может быстро вращать мотор или развивать большой момент. Образуются, так называемые, «мертвые зоны» по времени и расстоянию. Этот недостаток решается с помощью увеличения частоты приема, обработки сигнала и управления электромотором. Цифровые сервоприводы, в свою очередь, используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и выше. Можно сделать вывод, неоспоримыми преимуществами использования цифровых сервоприводов перед аналоговыми являются: быстрота реакции на внешние воздействия, а также на развитие необходимой скорость и крутящего момента. К недостаткам
следует отнести большее потребление электроэнергии, нежели аналоговые сервоприводы, а также более высокую стоимость, обусловленную сложность производства.
Помимо прочего, сервоприводы можно классифицировать по материалу, из которых произведены шестерни, чаще всего это пластик, карбон или металл. Пластиковые, в большинстве случаев, - нейлоновые, шестерни имеют небольшую массу, не подвержены износу и имеют наибольшую популярность при использовании в сервоприводах. Однако стоит упомянуть, что подобные шестерни не выдерживают больших нагрузок. Карбоновые шестерни более долговечны, практически не изнашиваются. К их недостаткам можно отнести лишь дороговизну готовых изделий. По сравнению с предыдущими типами, металлические шестерни обладают наибольшей массой, что влечет за собой очевидный недостаток – быстрое изнашивание, исключение составляют лишь титановые шестерни, отличающиеся также высокой стоимостью.
Существует также разделение сервоприводов по типу мотора. Моторы, используемые в сервоприводах, можно разделить на 3 группы: обычный мотор с сердечником, мотор без сердечника и бес коллекторный мотор.
Мотор с сердечников обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому при вращении мотора, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, в результате угол поворота сервопривода менее точный, чем при использовании мотора без сердечника. Мотор с полым ротором имеет единый магнитный сердечник с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но неоспоримым преимуществом их использования является более высокий уровень контроля вращающего момента и скорости по сравнению со стандартными. Не так давно при изготовлении сервоприводов начали использовать бес коллекторные моторы. К преимуществам их использования следует отнести отсутствие щеток, создающих сопротивление вращению и приводящих к изнашиванию, скорость поворота и крутящий момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бес коллекторным мотором – самые дорогостоящие среди всех типов сервоприводов, однако они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Наиболее распространенными типами сервоприводов, использующихся при создании проектов на Arduino являются микросервопривод SG90, его модификация с улучшенными характеристиками SG92R и сервопривод средних габаритов MG995. Сравнение сервоприводов происходит по таким параметрам, как максимально возможный угол поворота сервопривода, рабочие температуры, крутящий момент и стоимость готового изделия. Сравнительная характеристика приведена в таблице 13.
Таблица 13 – Сравнительная характеристика SG90, MG995 и SG92R
| Модель микросервопривода | Угол поворота,° | Рабочие температуры, °С | Крутящий момент, кг/см | Цена, руб. |
| SG90 | 180 | -30 ÷ +60 | 1,6 | 175,00 |
| MG995 | 120 | 0 ÷ +55 | 2,5 | 468,00 |
| SG92R | 180 | 0 ÷ +55 | 8,5 | 250,00 |
В результате сравнительной характеристики сервоприводов, был выбран SG90, внешний вид которого представлен на рисунке 17, обладающий минимальной ценой и крутящим моментом, достаточным для поворота одного лотка.

Рисунок 17 – Сервопривод SG90
Характеристики выбранного сервопривода представлены в таблице 14.
Таблица 14 – Характеристики SG90
| Наименование характеристики | Единица измерения | Значение |
| Напряжение питания | В | 4,8 ÷ 6 |
| Скорость вращения | °/cек | 60/12 |
| Крутящий момент при напряжении питания 4,8 В | кг/см | не менее 1,2 |
| Габариты | мм | 21,5×11,8×22,7 |
| Вес | г | 9 |
Подключение серводвигателя осуществляется тремя проводами разных цветов. Коричневый или черный провод подключается к «земле» контроллера, красный к цифровому выводу Arduino под номером 7, желтый к питанию 5V Arduino. Схема подключения представлена на рисунке 14 [12].
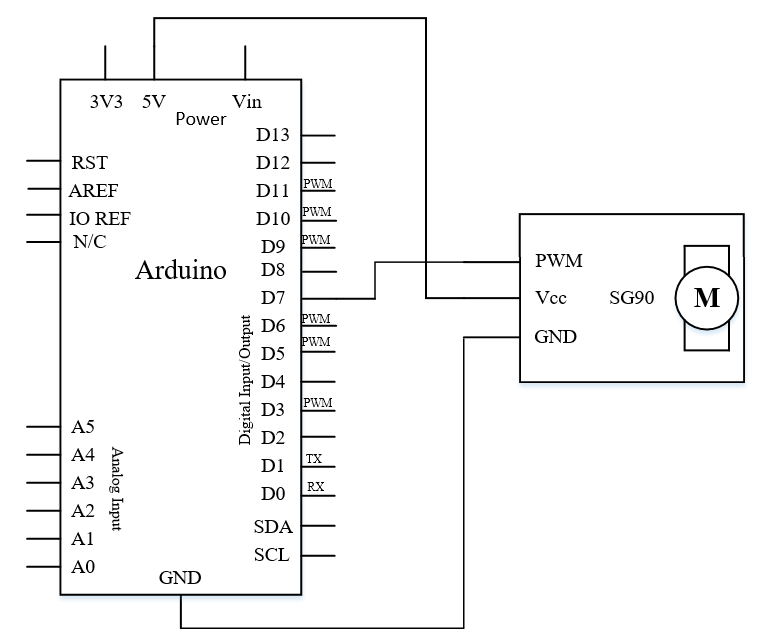
Рисунок 14 – Схема подключения сервопривода SG90 к контроллеру Arduino Uno
Питание вентиляторов осуществляется от AC/DC преобразователя MEAN WELL S-25-12, подключенного к сети 220 В, изображенный на рисунке 15.
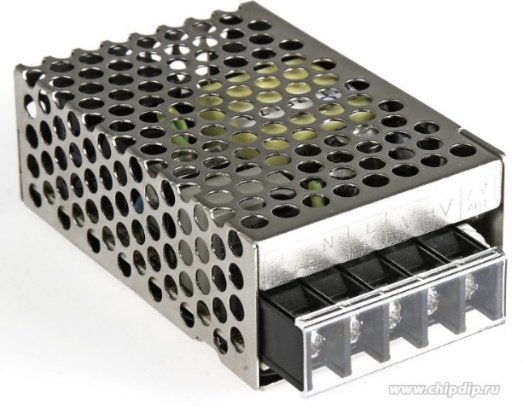
Рисунок 15 – Блок питания MEAN WELL S-25-12
Основные характеристики выбранного блока MEAN WELL S-25-12 [13] питания представлены в таблице 15.
Таблица 15 – Характеристики MEAN WELL S-25-12
| Название характеристики | Единица измерения | Значение |
| Мощность | Вт | 25 |
| Количество выходов | - | 1 |
| КПД | % | 76 |
| Выходное напряжение | В | 12 |
| Выходной ток | А | 0 ÷2,1 |
| Механическая подстройка выходного напряжения | % | 10 |
| Уровень пульсаций | мВ | 100 |
| Входное напряжение AC | В | 85-264 (Номинальное 230) |
| Входное напряжение DC | В | 120 ÷ +370 |
| Диапазон рабочих температур | °C | -10 ÷ +60 |
Питание контроллера Arduino UNO осуществляется в диапазоне 7÷12 В, рекомендуемым напряжением является 9 В, поэтому, для осуществления питания от выбранного блока питания, необходимо использовать понижающий DC-DC преобразователь LM2596, изображенный на рисунке 16 [14].
Рисунок 16 – Понижающий DC-DC преобразователь LM2596
Выбранные преобразователь напряжения обладает четырьмя выходами. Нестабилизированное напряжение подается на контакты IN+ и IN-, выходное напряжение снимается с OUT+ и OUT-. Уровень выходного напряжения регулируется вращением специального винта. Основные характеристики LM2596 представлены в таблице 16.
Таблица 16 – Основные характеристики преобразователя LM2596
| Наименование характеристики | Единица измерения | Значение |
| КПД | % | до 92 |
| Частота переключения | кГц | 150 |
| Входное напряжение | В | 3 ÷ 40 |
| Выходное напряжение | В | 1,5 ÷ 35 (регулируемое) |
| Предельный выходной ток | А | 3 |
| Влияние изменения входного напряжения на уровень выхода | % | 0,5 |
| Поддержание установленного напряжения с точностью | % | 2,5 |
| Рабочая температура | °C | -40 ÷ +85 |
Осуществление питания контроллера Arduino UNO от сети 220 В через блок питания и понижающий преобразователь напряжения проиллюстрировано на рисунке 17.
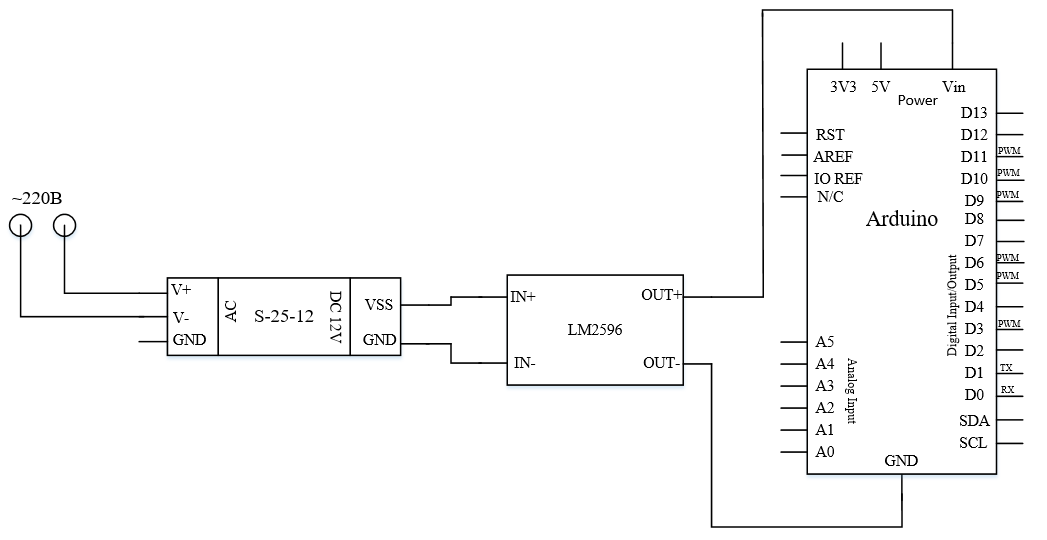
Рисунок 17 – Питание Arduino UNO
Использование сети Bluetooth, которая позволяет объединить различные устройства по беспроводному каналу связи, является одним из наиболее популярных решений для дистанционного управления системами, построенными на базе микроконтроллера Arduino. Для связи платы и компьютера используется интерфейс UART (Serial). Все микроконтроллеры Arduino оснащены, как минимум, одним портом для связи по интерфейсу UART.
Все существующие типы модулей Bluetooth имеют свои особенности, но их функционал во многом схож. Наиболее распространенными модулями для работы с Arduino являются устройства на основе чипа BC417. Эта серия называется HC. Самыми популярными моделями серии являются HC-05 и HC-06.
Оба модуля представляют собой две спаянные платы. Первая – заводская с микросхемой, вторая необходима для собственного изготовления устройств и оснащена выходами GPIO и стабилизатором напряжения. Основными критериями для выбора Bluetooth-модуля для управления являются радиус действия, режимы работы и стоимость изделия. Сравнительная характеристика представлена в таблице 17.
Таблица 17 – Сравнение HC-05 и HC-06
| Характеристика | Единица измерения | HC-05 |
| Радиус действия, | м | до 10 |
| Режимы работы | - | master, slave |
| Цена | руб. | 680 |
Несмотря на то, что радиус действия HC-06 выше, для управления системой выбран Bluetooth-модуль HC-05, представленный на рисунке 18. Он поддерживает режимы master и slave, то есть способен выступать не только ведомым, но и ведущим устройством в системе.
Рисунок 18 – Bluetooth-модуль HC-05
Основные характеристики модуля HC-05 представлены в таблице 18.
Таблица 18 – Характеристики HC-05
| Наименование характеристики | Единица измерения | Значение |
| 1 | | 2 |
| Диапазон частот радиосвязи | ГГц | 2,4-2,48 |
| Мощность передачи | мВт | 0,25-2,5 |
| Напряжение питания | В | 3,3-5 |
| Потребляемый ток | мА | 50 |
| Радиус действия | м | до 10 |
| Интерфейс | - | UART |
| Режимы | - | master, slave |
| Рабочий диапазон температур | °С | -25 ÷+75 |
| Максимальная скорость обмена данными | бод | 115200 |
| Габариты | мм | 27×13×2,2 |