Файл: Курсовая работа по пм. 01 Эксплуатация, техническое обслуживание и ремонт судового энергетического оборудования.docx
Добавлен: 03.02.2024
Просмотров: 143
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Экстренный реверс
Как отмечалось, тормоза маховика включаются лишь при реверсе неостановленного двигателя, то есть при экстренном реверсе. Допустим, двигатель работает вперед при открытом клапане 14 и при каком-то положении эксцентрика 11, то есть при какой-то по- 25 даче топлива. Для экстренного реверса вал 10 дистанционного поста управления поворачивается в направлении обратного хода. Клапан 14 закрывается, клапан 16 открывается, а клапан пневмозадатчика 12 сначала закрывается, затем после прохождения положения «Стоп» снова открывается. Эксцентрик 11 установил затяжку пружины, соответствующую заданному режиму. Через пневмозадатчик 12 и клапан 16 сжатый воздух направляется к мембране сервоклапана 18 и открывает его. Через открывшийся сервоклапан 18 воздух устремляется к клапану блокировки 54, и начинается процесс реверсирования. Одновременно через перекидной клапан 25 воздух поступает к сервоклапану 51, закрывая его, и к пока закрытому сервоклапану 46 реле скорости. Через открытый клапан 26 реле направления воздух идет также к сервомотору стопзолотника (выключается подача топлива), под мембрану сервоклапана 37, закрывая его, и через открытый сервоклапан 36 и клапан быстрой разгрузки 35 к тормозам 34. После выключения стоп-золотником подачи топлива и включения тормозов маховика двигатель достаточно быстро остановится. При допустимом значении частоты вращения (около 25 об/мин) откроется клапан 46 реле скорости. Сжатый воздух пройдет через него под мембрану сервоклапана 36 и закроет последний. Тормоза 34 освободят маховик. Кроме того, воздух от клапана 46 реле скорости поступит к сервоклапану 45. Так как реверс уже закончен и сервоклапан 45 открыт, воздух направляется к главному пусковому клапану 42, открывает его, и начинается пуск на воздухе. С началом вращения вала в заданном направлении срабатывает реле направления, и дальше процесс пуска протекает подобно рассмотренному.
Управление из машинного отделения
Для перехода на ручное управление двигателем из машинного отделения маховичок 58 вместе с его валом передвигается вдоль оси в направлении «от себя» до тех пор, пока канавка шайбы переключения 22 не встанет над толкателем клапана 9. Этот клапан закроется и прекратит питание ДАУ. При осевом сдвиге маховичка 58 кулачковые шайбы 23 и 59 встали под клапаны 6 и 5 ручного реверса, к которым подведен сжатый воздух из сети питания. Если теперь поворачивать маховичок 58 в том или другом направлении, то будут открываться клапа- 26 ны 5 или 6. Они включены в цепи управления через перекидные клапаны 20 и 21 параллельно сервоклапанам 18 и 19. Следовательно, с открытием клапанов 5 или 6 реверс и пуск будут протекать так же, как было описано. Однако при ручном управлении сжатый воздух не поступает к исполнительному механизму 2 регулятора, и он подачу топлива не включит. Поэтому для воздействия на механизм регулирования и предусмотрен эксцентрик 24, который на рис. 4 был обозначен поз. 3. Кнопка автономного пуска 43 используется для пуска дизеля в случае его реверсирования вручную, без помощи сжатого воздуха.

Рис.1.Система Дау Г70-5
2.Законы регулирования.П-регулятор
Закон П-регулирования
Пропорциональный закон регулирования — это процесс регулирования, при котором относительное изменение регулирующего воздействия (выходного сигнала регулятора) пропорционально относительному отклонению регулируемой величины.
Законом действия регулятора (законом регулирования или алгоритмом регулировании) называют функциональную взаимосвязь между погрешностью регулирования ε=узд-у и изменением управляющего воздействия Δu: Δu(τ)=f[ε(τ)] или u-u0=f(узд-у), где u – текущее значение управляющего воздействия; u0- значение управляющего воздействия, соответствующее заданному значению управляемого параметра узд.
П:Называют линейный закон регулирования, отражающий прямо пропорциональную зависимость между изменением управляющего воздействия и погрешностью регулирования: Δu(τ)=Крε(τ), где Кр – коэф усиления, являющийся параметром настройки пропорционального регулятора.
Статические характеристики: допустим, что для компенсации некоторого возмущающего воздействия требуется управляющее воздействие u1. Для его формирования П-регулятору необходимо, чтобы регулируемый параметр принял новое значение, отличающееся от заданного на некоторую величину (величину статической погрешности ε∞). Чем больше Кр, тем круче статическая характеристика, тем меньше статическая погрешность. При Кр=0 (линия 1) отклонение текущего значения параметра от заданного значения не вызывает никакого перемещения затвора регулирующего органа. Это равносильно отсутствию регулятора, и возмущении компенсировано быть не может. При Кр=∞ (линия 5) п-регулятор не давал бы статической погрешности (ε∞=0). Практически такой регулятор реализовать нельзя. Коэффициент усиления регулятора не должен превышать некоторого максимального допустимого значения. Отсюда следует, что избавиться от недостатка, присущего пропорциональному закону – статической погрешности – принципиально невозможно. Можно уменьшить статич ошибку регулирования, увеличивая Кр.
Передаточная функция: Wp(s)=U(s)/E(s)= Кр, где E(s)=L[ε(τ)]- изображение по Лапласу ошибки регулирования; U(s)=L[u(τ)] – изображение по Лапласу вых сигнала регулятора (управляющего воздействия). Передаточная функция соответствует передаточной функции статического звена нулевого порядка и, следовательно, в динамическом отношении П-регулятор является статическим звеном нулевого порядка. Переходная характеристика: h(τ)= Кр∙1(τ). При изменении регулируемого параметра П-регулятор мгновенно формирует управляющее воздействие, т.е. является безынерционным. Частотная передаточная функция: Wp(jω)= Кр.
АФЧХ П-регулятора изображается одной точкой на действительной оси на расстоянии Kp от начала координат. Амплитудная и фазовая частотные характеристики: Ар(ω)= Кр; φр(ω)=0.
Если на вход П-регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний
Принцип работы П-регулирования
При пропорциональном регулировании ступенчатый сигнал на вводе приводит к ступенчатому изменению сигнала на выходе, а линейно изменяющийся сигнал на входе дает линейно изменяющийся сигнал на выходе. Иначе говоря, в пропорциональном регуляторе относительное изменение выходного сигнала (регулирующего воздействия) пропорционально относительному отклонению регулируемой величины (входного сигнала регулятора). Это позволяет устранить зону нечувствительности, характерную для двухпозиционного регулирования.
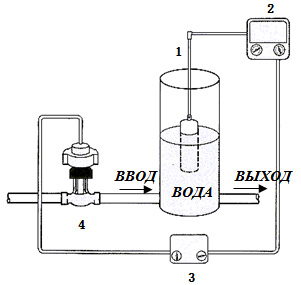
Рис . 2 .Простая система автоматического регулирования
Когда уровень воды в резервуаре изменяется, первичный чувствительный элемент (1) преобразовывает изменение в механическое движение. Механическое движение измеряется измерительным элементом (2) и преобразовывается в пневматический сигнал. Пневматический сигнал передается регулирующему элементу (регулятору) (3), который измеряет сигнал, сравнивает его с уставкой, вычисляет разность и вырабатывает сигнал управления (корректирующее воздействие), передаваемый к конечному элементу системы регулирования (4). Конечный элемент регулирования (в нашем примере пневматический регулирующий клапан) перемещается согласно выходному сигналу регулятора, изменяя приток воды в резервуар.
Пропорциональная составляющая
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемого в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
-
Разработать схему автоматического поддержания давления в судовой системе пресной воды
Системы бытового водоснабжения предназначены для обеспечения физиологических, санитарно-гигиенических и хозяйственно-бытовых потребностей экипажей судов и пассажиров путем подачи пресной (питьевой и мытьевой) и забортной воды. В зависимости от вида используемой воды системы водоснабжения подразделяются на бытовые системы пресной и забортной воды.
Системы бытовой пресной воды различаются по назначению, источнику водоснабжения, принципу действия и наличию или отсутствию санитарно-гигиенической обработки воды.
По назначению они делятся на следующие:
-
системы питьевой воды; -
системы мытьевой воды; -
единые системы бытовой пресной воды.
Запасы пресной воды принимаются на суда от береговых гидрантов, с судов-водолеев, а при большой автономности могут пополняться от оборудованной на судне станции приготовления пресной воды (ППВ) из забортной.
Система питьевой воды предназначена для обеспечения приема, хранения и подачи воды на камбузы, в медицинские помещения, к кипятильникам, общим и каютным умывальникам и другим потребителям, предусмотренным Санитарными правилами. В дополнение к этой системе на судах смешанного плавания в последние годы стала применяться самостоятельная система приготовления питьевой воды (СППВ), обеспечивающая прием забортной воды, очистку, обеззараживание и подачу ее к системе питьевой воды.
Система мытьевой воды служит для приема, хранения и подачи воды в бани, сауны, душевые, ванные, для стирки белья, мытья провизионных кладовых и других нужд.
Единая система бытовой пресной воды выполняет функции систем питьевой и мытьевой воды.
По принципу действия системы ботовой пресной воды бывают гравитационными, когда подача воды к потребителям осуществляется за счет сил тяжести; принудительными, когда вода к потребителям подается насосом или за счет давления, создаваемого в пневмогидроцистерне; комбинированными, когда применяется и принудительная (например, в расходно-напорные цистерны) и гравитационная подача (из расходно-напорных цистерн к потребителям).
Выбор типа системы водоснабжения осуществляется исходя из назначения судна, численности экипажа и пассажиров, источника водоснабжения, автономности по запасам пресной воды и других факторов.
Система бытовой забортной воды обеспечивает прием и подачу забортной воды в санитарные помещения, на мытье палуб, охлаждение кипятильников, а в необходимых случаях подачу забортной воды в бани, душевые, ванные, плавательные, бассейны и на другие нужды. Системы бытовой забортной воды по принципу действия относятся к принудительному типу систем, работающих непосредственно от насосов или от пневмоцистерны.
На морских судах принято устанавливать независимые друг от друга бытовые системы питьевой, мытьевой и забортной воды, проектируя их на срок службы, равный сроку службы судна.
Качество пресной воды на судах и его нормирование
Исследования показывают, что водопотребление способствует удовлетворению физиологических потребностей человека в воде лишь тогда, когда оно не сопровождается неблагоприятный или вредным влиянием на его здоровье. Это влияние может проявляться не только в виде инфекционных и неинфекционных заболеваний, но и косвенный путем. Последнее зависит от способности воды (цвет, залах) вызывать неприятные субъективные ощущения, при которых ее потребление становится практически невозможным.
Качество питьевой воды регламентируется государственным стандартом. Питьевая вода, подаваемая судовыми системами на морских судах, должна быть благоприятной по своим органолептическим свойствам, безвредной по химическому составу и не должна содержать болезнетворных и других опасных микроорганизмов. Для мытьевой воды на морских судах считается достаточным, если она отвечает требованиям государственного стандарта для питьевой воды лишь по бактериологическим и токсикологическим показателям. В случае применения единой системы бытовой пресной воды на судах вся вода, подаваемая потребителям, должна полностью соответствовать требованиям государственного стандарта для питьевой воды.