Файл: Автоматизация технологических процессов и производств.doc
Добавлен: 15.11.2018
Просмотров: 2957
Скачиваний: 28
СОДЕРЖАНИЕ
Ввод аналоговых сигналов в Simatic S7-300
1.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Визуализация и архивирование аналогового сигнала с использованием SCADA системы ProTool
2.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Реализация ШИМ в STEP7 и организация съема переходной характеристики лабораторной печи
3.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Идентификация объекта управления
4.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Определение оптимальных параметров ПИ регулятора
5.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Построение системы регулирования температуры
6.4 Контрольные вопросы и задания
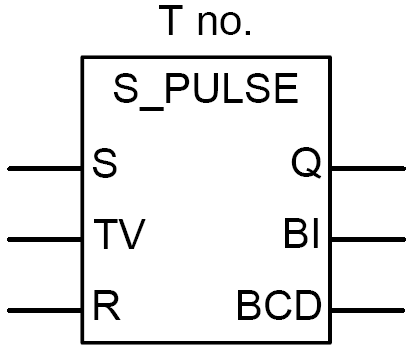
Далее рассмотрим только S_PULSE и S_PEXT, которые используются при выполнении лабораторной работы.
S_PULSE: Задание параметров и запуск таймера «Импульс»
Обозначение:
|
Параметр |
Тип данных |
Область памяти |
Описание |
|
Т no. |
TIMER |
T |
Номер таймера. Диапазон номеров зависит от CPU |
|
S |
BOOL |
I,Q,M,D,L |
Вход запуска |
|
TV |
S5TIME |
I,Q,M,D,L |
Установка времени (от 0-9990) |
|
R |
BOOL |
I,Q,M,D,L |
Вход сброса |
|
BI |
WORD |
I,Q,M,D,L |
Остаток времени (значение в двоичном коде) |
|
BCD |
WORD |
I,Q,M,D,L |
Остаток времени (значение в формате BCD) |
|
Q |
BOOL |
I,Q,M,D,L |
Состояние таймера |
Описание:
S_PULSE: (S5 таймер «Импульс») запускает заданный таймер по нарастающему фронту (изменение состояния сигнала с 0 на 1) на входе запуска (S). Для запуска таймера всегда необходимо изменение сигнала. Таймер продолжает работать в течение времени, заданного на входе TV, пока состояние сигнала на входе S остается равным 1. Пока таймер работает, опрос выхода Q на высокий уровень дает результат логической операции 1. Если на входе S сигнал меняется с 1 на 0 до истечения заданного времени, таймер останавливается. Тогда опрос состояния сигнала на 1 на выходе Q дает 0. Если во время работы таймера происходит изменение с 0 на 1 сигнала на входе сброса (R), то таймер сбрасывается. Это изменение сбрасывает в ноль время и базу времени. Единица на входе R таймера не оказывает никакого влияния если таймер не работает.
Текущее значение времени может быть считано на выходах BI и BCD. Значение времени на выходе BI представлено в двоичном формате, а на BCD – в двоично-десятичном формате. Текущее время равно разнице между начальным значением, заданным на входе TV и временем, прошедшим с момента запуска таймера.
Временные диаграммы (см. рис. 3.2):
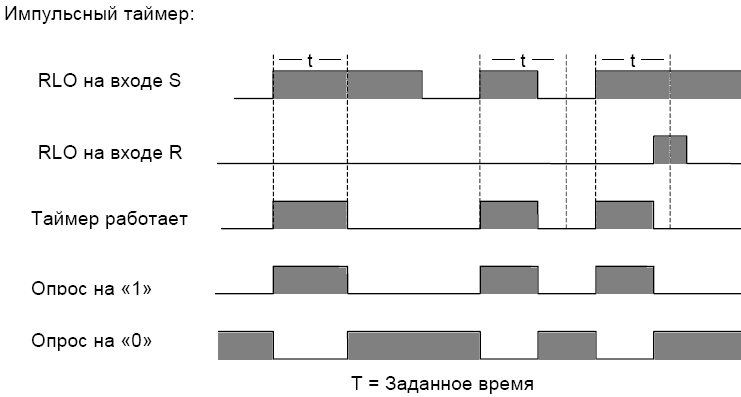
Рис. 3.2 Временные диаграммы таймера S_PULSE
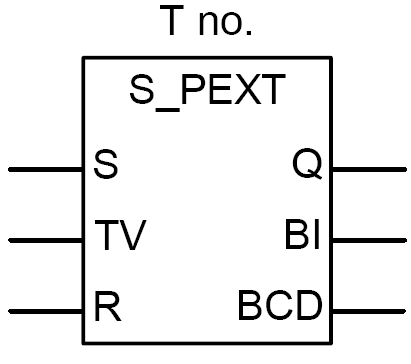
S_PEXT: Задание параметров и запуск таймера «Импульс с памятью»
Обозначение:
|
Параметр |
Тип данных |
Область памяти |
Описание |
|
Т no. |
TIMER |
T |
Номер таймера. Диапазон номеров зависит от CPU |
|
S |
BOOL |
I,Q,M,D,L |
Вход запуска |
|
TV |
S5TIME |
I,Q,M,D,L |
Установка времени |
|
R |
BOOL |
I,Q,M,D,L |
Вход сброса |
|
BI |
WORD |
I,Q,M,D,L |
Остаток времени (значение в двоичном коде) |
|
BCD |
WORD |
I,Q,M,D,L |
Остаток времени (значение в формате BCD) |
|
Q |
BOOL |
I,Q,M,D,L |
Состояние таймера |
Описание:
S_PEXT:(S5 таймер «Удлиненный Импульс») запускает заданный таймер, по нарастающему фронту на входе запуска (S). Для запуска таймера всегда необходимо изменение сигнала. Таймер продолжает работать в течение времени, заданного на входе TV, даже если состояние сигнала на входе S меняется на 0 до истечения заданного времени. Пока таймер работает выход Q выдает сигнал 1. Таймер перезапускается с заданным временем, если состояние сигнала на входе S меняется с 0 на 1 во время работы таймера.
Если во время работы таймера происходит изменение с 0 на 1 сигнала на входе сброса (R), то таймер сбрасывается. Это изменение сбрасывает в ноль время и базу времени.
Текущее значение времени может быть считано на выходах BI и BCD. Значение времени на BI представлено в двоичном формате, а на BCD – в двоично-десятичном формате. Текущее время равно разнице между начальным значением, заданным на входе TV и временем, прошедшим с момента запуска таймера.
Временные диаграммы (см. рис. 3.3):
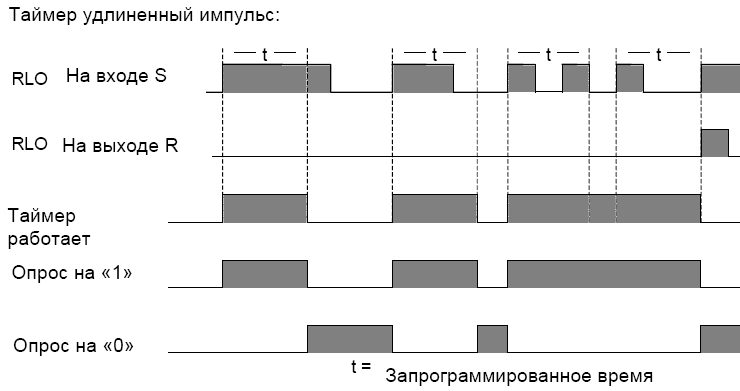
Рис. 3.3 Временные диаграммы таймера S_PEXT
Компоненты таймера
Значение времени:
Биты с 0 по 9 в таймерном слове содержат значение времени в двоичном коде. Значение времени задает количество временных отрезков. Когда таймер актуализируется, значение времени уменьшается на одну единицу через интервалы, установленные базой времени. Значение времени уменьшается до тех пор, пока оно не станет равным нулю. Задавать значение времени можно в двоичном, шестнадцатиричном или двоично-десятичном коде (BCD).
Загрузить значение времени можно с использованием следующего синтаксиса:
-
S5T#aH_bM_cS_dMS,
где: a = часы,
b = минуты,
c = секунды,
d = миллисекунды.
Максимальное время, которое можно ввести, составляет 9 990 секунд или 2H_46M_30S.
S5TIME#4S = 4 секунды
s5t#2h_15m = 2 часа и 15 минут
S5T#1H_12M_18S = 1 час, 12 минут и 18 секунд
3.3 Порядок выполнения работы
3.3.1 Запустить программу SIMATIC Manager.
3.3.2 Создать новый проект и сконфигурировать контроллер в STEP7.
3.3.3 В левой части окна проекта раскрыть дерево до Вlocks. Открыть организационный блок OB1. В появившемся окне Properties выбрать язык, на котором будем писать программу: LAD (контактно-релейные схемы) (см. рис. 3.4).
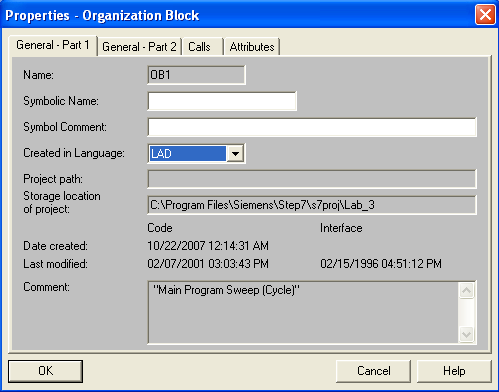
Рис. 3.4 Окно параметров организационного блока OB1
3.3.4 В появившемся окне написать программу выполнения поставленной задачи (реализовать съём переходной характеристики) (см. рис. 3.5):
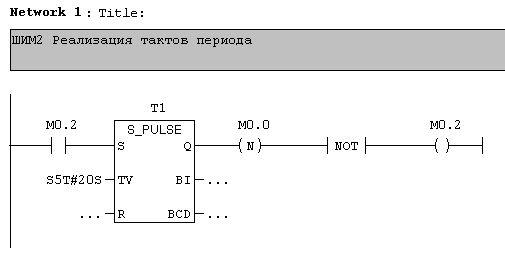
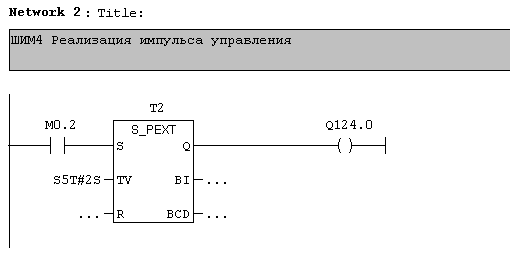
Рис. 3.5 Программа выполнения поставленной задачи
3.3.5 Сохранить изменения в OB1, выбрав в главном меню File/Save.
3.3.6
В левой части окна проекта сворачиваем
все «-» до SIMATIC
300(1). На панели инструментов нажать на
кнопку Download
![]() и далее согласиться со всем.
и далее согласиться со всем.
3.3.7 Загрузить контроллер или Simulating (установить тумблер в Run).
3.3.8
Вернуться в блок OB1
и на панели инструментов нажать на
кнопку Monitor
(on/off)
![]() .
Если всё выполнено правильно, то программа
будет работать как показано на рис. 3.6,
3.7.
.
Если всё выполнено правильно, то программа
будет работать как показано на рис. 3.6,
3.7.
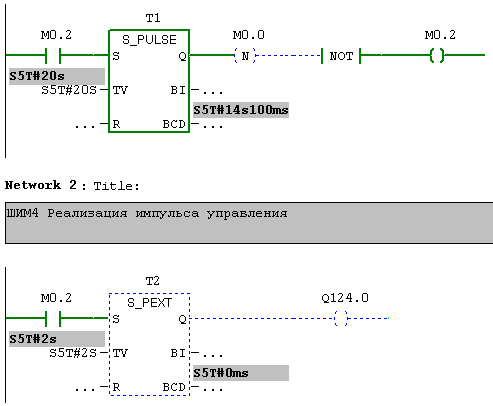
Рис. 3.6 Считает таймер Т1
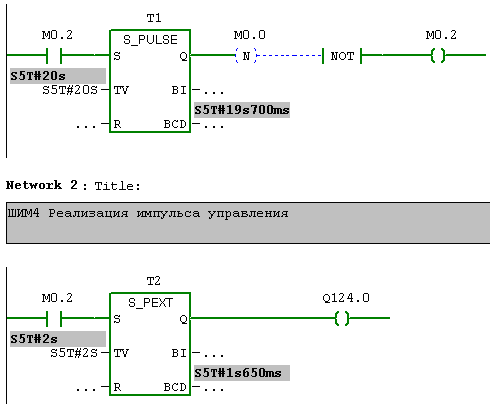
Рис. 3.7 Считают таймеры Т1 и Т2
3.3.9
Если необходимо отредактировать
программу, надо отжать кнопку Monitor
(on/off)
![]() и выключить контроллер или Simulating
(установить тумблер на STOP).
Отредактировав, повторить пункты
3.3.8-3.3.10.
и выключить контроллер или Simulating
(установить тумблер на STOP).
Отредактировав, повторить пункты
3.3.8-3.3.10.
3.3.10 Создать архив, используя ProTool (см. рис. 3.8). Принцип формирования архива описан в лабораторной работе №2.
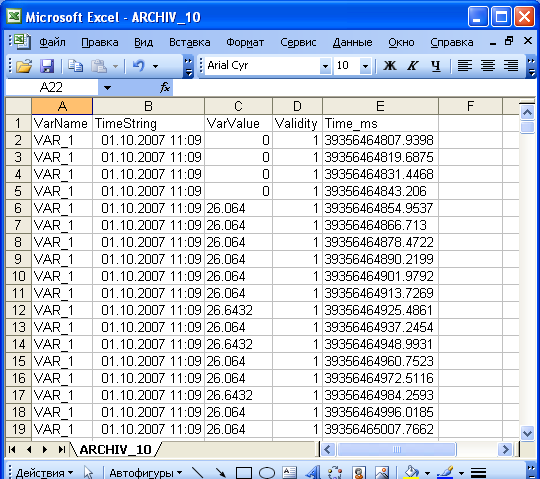
Рис. 3.8 Отображение результатов в программе Excel
3.3.11 Построить график кривой переходного процесса (см. рис. 3.9). Это можно реализовать с помощью средств пакетов прикладных программ Microsoft Excel или Matlab.
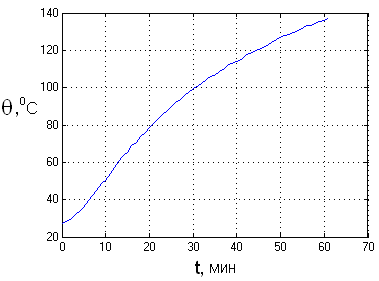
Рис. 3.9 График кривой переходного процесса
3.3.12 Сделать выводы по проделанной работе.
3.4 Контрольные вопросы и задания
3.4.1 Что такое ШИМ и каков принцип данного вида модуляции непрерывного сигнала?
-
Для чего используется инструкция «выходная катушка» в STEP 7?
3.4.3 Поясните принцип работы инструкции «выделение положительного фронта логической операции».
3.4.4 Поясните принцип работы таймеров «S_PULSE» и «S_PEXT».
Обязательные составляющие отчета
1. Программа ШИМ на STEP 7.
2. Архив значений переходного процесса.
3. График переходного процесса.
Лабораторная работа №4
Идентификация объекта управления
4.1 Цель работы: освоение методики идентификации объекта управления.
4.2 Теоретическое введение
Задача идентификации объекта управления заключается в нахождении его математической модели, которая в некотором смысле наилучшим способом описывает его динамические свойства. Если конечной целью является нахождение оптимального управления, то достаточно, чтобы при заданном входе выход модели был эквивалентен выходу системы. В этом случае нет необходимости в том, чтобы структура и параметры модели совпадали со структурой и параметрами физической системы.
Вообще же задача построения математической модели заключается в определении структуры объекта, нахождении значений параметров и, если необходимо, значений зависимых переменных, например, переменных состояния.
Методы идентификации в большинстве случаев при заданной ограниченной точности измерений не позволяют построить сложную модель, эквивалентную по структуре и параметрам реальному объекту. Этот факт, однако, не мешает последующему использованию такой модели, если, конечно, она отражает существенные стороны объекта. Более того, именно в силу своей простоты такая модель наиболее пригодна для последующего использования.
Идентификацию можно провести либо методами физико-математического анализа, либо методами экспериментального анализа.
При идентификации методами физико-математического анализа исходят из конструктивных данных и математического описания основных процессов, которые имеют место в изучаемом объекте. Получают систему алгебраических и дифференциальных уравнений, содержащих как входные и выходные переменные, так и переменные состояния. В эти уравнения иногда включаются избыточные внутренние переменные объекта, которые можно не учитывать.
При идентификации методами экспериментального анализа обычно находят математическую модель устойчивого объекта по измерениям его входных и выходных величин.
В работе исследуется система, состоящая из двух тепловых объектов – это печь и термопара. Каждый из этих объектов можно описать математически апериодическим звеном первого порядка и звеном запаздывания, следовательно, общую модель системы следует искать в виде:
![]()
Для таких объектов при внесении возмущения в виде единичного скачка может получиться переходная функция, показанная на рис. 4.1. Она представляет собой монотонную кривую, характерной точкой которой является точка перегиба, соответствующая моменту изменения знака второй производной.
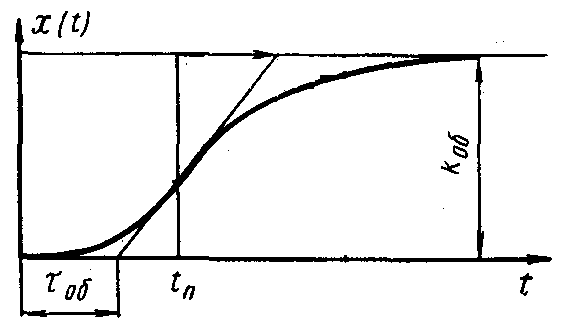
Рис. 4.1 Переходная характеристика статического объекта второго порядка
Передаточная функция такого объекта может рассматриваться как произведение передаточных функций двух апериодических объектов с постоянными времени Т1, и Т2. Переходная функция определяется выражением:
![]()
Для приближенного определения динамических параметров статического объекта (запаздывания τоб, коэффициента передачи Коб) в точке перегиба изменения выходной величины проводят касательную к переходной характеристике и продолжают ее до пересечения с линией начального значения выходной величины (осью абсцисс). Отрезок времени от момента внесения возмущения до точки пересечения касательной с осью определит запаздывание объекта τоб.
Коэффициент передачи статического объекта представляет собой изменение выходной величины объекта при переходе из начального в новое установившееся состояние, отнесенное к изменению возмущения на входе:
![]() ,
,
где х0 – значение выходной величины в начальном установившемся состоянии;
![]() – то же, для нового
установившегося состояния;
– то же, для нового
установившегося состояния;
![]() –
величина вносимого
возмущения.
–
величина вносимого
возмущения.
Для определения значений постоянных времени можно воспользоваться различными методами оптимизации, такими как градиентный метод, покоординатного спуска, простого перебора значений с достижением минимума функционала, представляющего собой сумму квадратов невязок:
![]()