Файл: Автоматизация технологических процессов и производств.doc
Добавлен: 15.11.2018
Просмотров: 2973
Скачиваний: 28
СОДЕРЖАНИЕ
Ввод аналоговых сигналов в Simatic S7-300
1.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Визуализация и архивирование аналогового сигнала с использованием SCADA системы ProTool
2.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Реализация ШИМ в STEP7 и организация съема переходной характеристики лабораторной печи
3.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Идентификация объекта управления
4.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Определение оптимальных параметров ПИ регулятора
5.4 Контрольные вопросы и задания
Обязательные составляющие отчета
Построение системы регулирования температуры
6.4 Контрольные вопросы и задания
4.3 Порядок выполнения работы
4.3.1 Открыть архив, созданный в лабораторной работе №3, в пакете программ Microsoft Office Excel. Привести документ к виду, представленному на рис. 4.2.
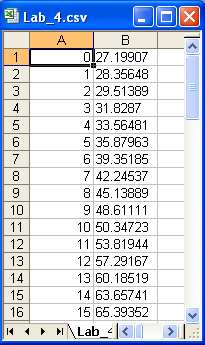
Рис. 4.2 Документ Microsoft Excel. Зависимость температуры печи от времени
4.3.2 Открыть изменённый архив в Matlab, выполнив File/Open. В открывшемся окне (см. рис. 4.3) выбрать Next/Finish.
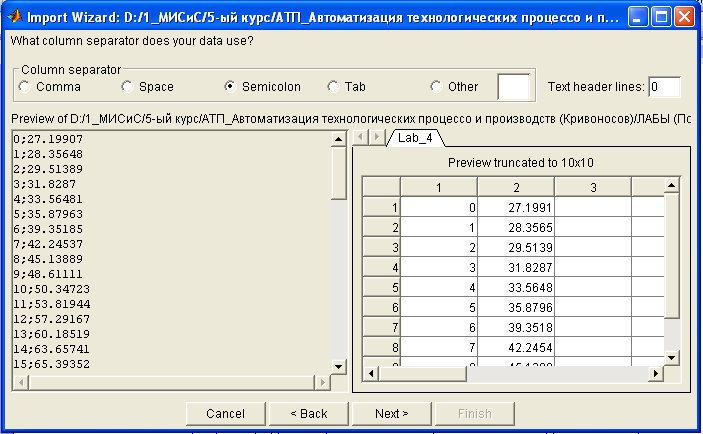
Рис. 4.3 Зависимость температуры печи от времени в Matlab
4.3.3
В Matlab
запустить Simulink,
нажав в панели инструментов на пиктограмму
![]() .
Создать новый документ, выполнив
File/New/Model.
Собрать схему, приведённую на рис. 4.4. В
блок From
Workspace
в поле Data
вести имя архива “Lab_4”.
Запустить проект, нажав на панель
инструментов на кнопку Start
Simulation
.
Создать новый документ, выполнив
File/New/Model.
Собрать схему, приведённую на рис. 4.4. В
блок From
Workspace
в поле Data
вести имя архива “Lab_4”.
Запустить проект, нажав на панель
инструментов на кнопку Start
Simulation
![]() .
Открыв Scope,
проанализировать график переходного
процесса (см. рис. 4.5).
.
Открыв Scope,
проанализировать график переходного
процесса (см. рис. 4.5).
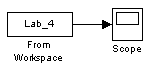
Рис. 4.4 Схема для построения графика переходного процесса
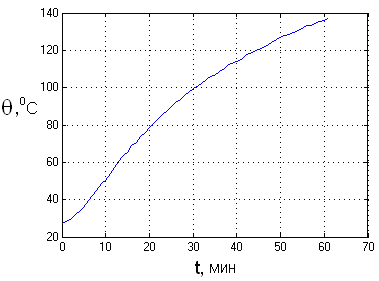
Рис. 4.5 График переходного процесса
4.3.4 Для идентификации объекта собрать схему, изображенную на рис. 4.6. Здесь Δx – сигнал управления в %, θ0 – начальное значение температуры, оС. Для схемы установить дискретность моделируемого времени равную дискретности съема данных при получении переходной характеристики (Вкладка Simulation → Simulation parameters → Solver option → Fixed step + Ode 5 (в соседнем меню)). Далее в Matlab в окне Command Window ввести значения параметров K, T1 и T2 (см. рис. 4.7). После этого открыть блок NCD Outport, выбрать в меню Optimization/Parameteres, в появившемся окне (см. рис. 4.8) ввести оптимизируемые параметры, их нижние и верхние пределы оптимизации. Запустить проект, нажав на панель инструментов на кнопку Start (см. рис. 4.9). Далее в Matlab в окне Command Window просмотреть значения параметров K, T1 и T2 (см. рис. 4.10).
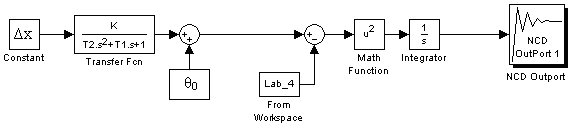
Рис. 4.6 Схема для идентификации объекта
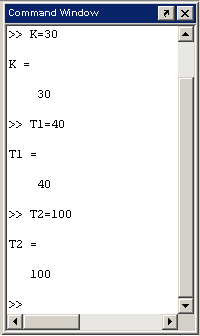
Рис. 4.7 Ввод параметров K, T1 и T2
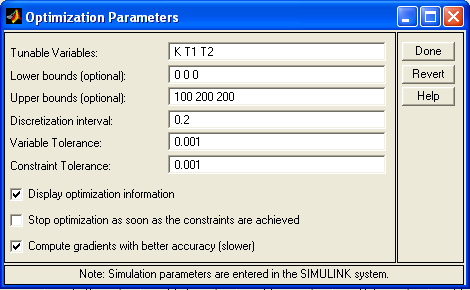
Рис. 4.8 Определение параметров оптимизации К, Т1, Т2
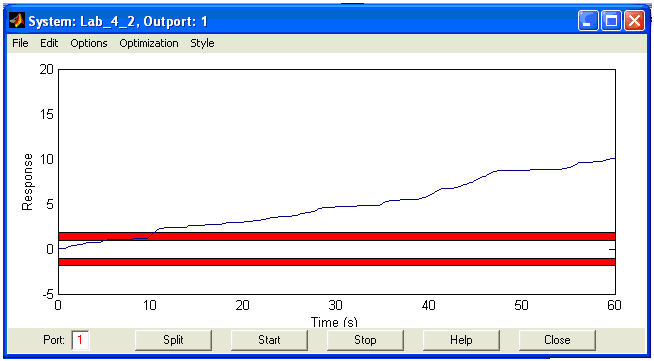
Рис. 4.9 Результат работы блока NCD Outport
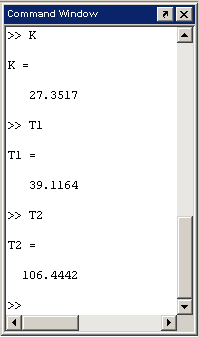
Рис. 4.10 Просмотр оптимизированных параметров К, Т1, Т2
4.3.5 Используя Scope, просмотреть графики переходного процесса, построенных по измеренным (в лабораторной работе №3) и по модельным значениям (см. рис. 4.11). Проанализировать полученные результаты (см. рис. 4.12).
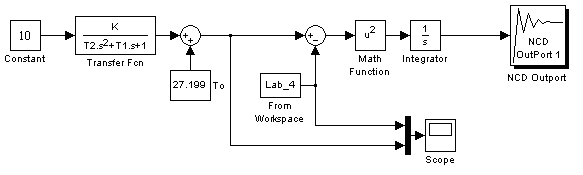
Рис. 4.11 Схема для просмотра графиков переходного процесса, построенных по измеренным и по модельным значениям
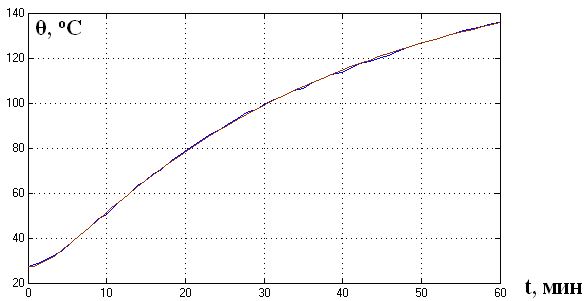
Рис. 4.12 Графики переходного процесса, построенные по измеренным и по модельным значениям
-
Сделать выводы по проделанной работе.
4.4 Контрольные вопросы и задания
4.4.1 Что называется идентификацией объекта?
4.4.2 Каким образом определяется время запаздывания?
4.4.3 Какой вид имеет переходная характеристика апериодического звена 2-го порядка?
4.4.4 Какие величины можно определить по переходной характеристике апериодического звена 2-го порядка?
Обязательные составляющие отчета
1. Переходная характеристика объекта управления.
2. Текст программы или схема оптимизации.
3. График сравнения экспериментальной и модельной переходных функций объекта управления.
Лабораторная работа №5
Определение оптимальных параметров ПИ регулятора
5.1 Цель работы: Ознакомление с особенностями реализации ПИ закона регулирования контроллера. Изучение способов оптимизации коэффициентов регулятора.
5.2 Теоретическое введение
ПИД регулятор контроллера выполняет пропорционально-итегрально-дифференциальное преобразование сигнала и описывается следующей переходной характеристикой:
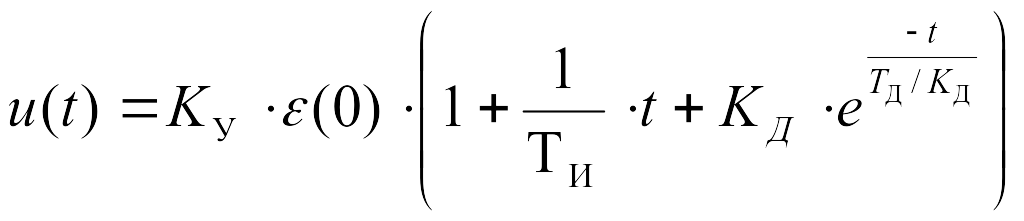 ,
,
где u(t) – управляющая переменная в автоматическом режиме регулятора;
ε(0) – ступенчатое изменение нормализованного сигнала ошибки;
КУ – усилие регулятора;
ТИ – постоянная времени интегрирования;
ТД – время дифференцирования;
КД – коэффициент дифференцирования.
Рассматривается задача оптимизации коэффициентов ПИ закона регулирования. Существует много способов решения данной задачи. Например, можно воспользоваться пакетами Siam, Matlab. А также можно применить метод структурного моделирования в комплексе с оптимизацией функционала качества по методу наименьших квадратов.
Оптимизация коэффициентов ПИ регулятора проводится согласно схеме, представленной на рис. 5.1.
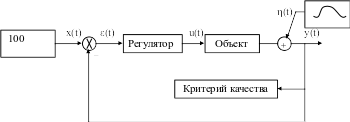
Рис. 5.1 Схема оптимизации параметров ПИ регулятора
На рис. 5.1: x(t) – сигнал задания;
ε(t) – сигнал ошибки;
u(t) – сигнал управления;
η(t) – помеха измерения;
y(t) – выход объекта.
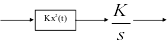
При использовании пакета Siam критерий качества выглядит следующим образом:
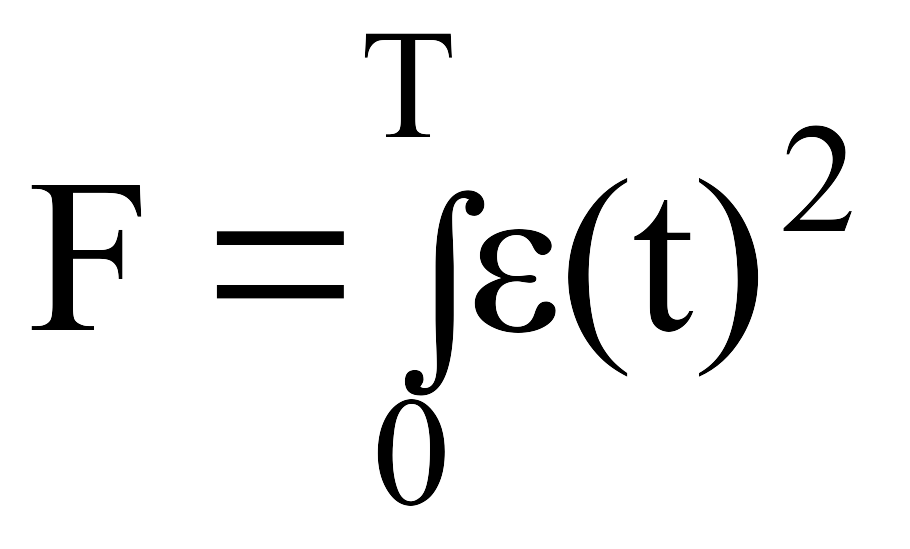
и имеет структуру для построения в пакете:
При использовании пакета Matlab для оптимизации можно воспользоваться блоком NCD Outport в среде Simulink (см. рис. 5.2). Данный блок позволяет выполнять следующие операции:
-
Задать требуемые ограничения во временной области на любой сигнал оптимизируемой системы;
-
Указать параметры, подлежащие оптимизации;
-
Указать неопределенные параметры;
-
Провести параметрическую оптимизацию системы с учетом заданных ограничений.
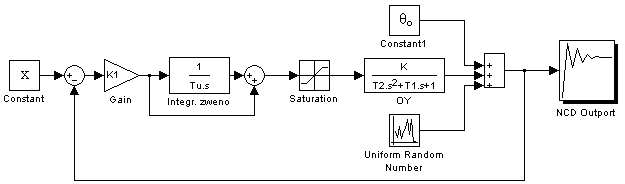
Рис. 5.2 Пример схемы оптимизации, реализованной в среде пакета Matlab
5.3 Порядок выполнения работы
5.3.1 Создать схему для оптимизации ПИ коэффициентов одним из предложенных выше способов.
Для этого в Matlab
запустить Simulink,
нажав в панели инструментов на пиктограмму
![]() .
Создать новый документ, выполнив
File/New/Model.
Собрать схему, приведённую на рис. 5.2.
.
Создать новый документ, выполнив
File/New/Model.
Собрать схему, приведённую на рис. 5.2.
В блоке Saturation ввести значения в поля Upper limit (например, 100) и в Lower limit (например, 0). Допустим, что присутствует шум с равномерным законом распределения в диапазоне [-0.1; 0.1], поэтому в блоке Uniform Random Number в поле Minimum ввести -0.1, а в поле Maximum ввести 0.1.
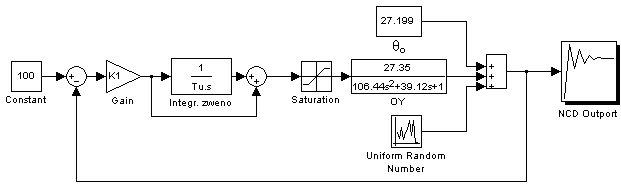
Рис. 5.3 Схема для оптимизации ПИ коэффициентов
5.3.2 Провести оптимизацию коэффициентов.
В Matlab в окне Command Window ввести значения параметров K1, Tu (см. рис. 5.4). После этого открыть блок NCD Outport, выбрать в меню Optimization/Parameteres, в появившемся окне (см. рис. 5.5) ввести оптимизируемые коэффициенты, их нижние и верхние пределы оптимизации. Запустить проект, нажав на панель инструментов на кнопку Start (см. рис. 5.6). Далее в Matlab в окне Command Window просмотреть значения параметров K1 и Tu (см. рис. 5.7).
Рис. 5.4 Ввод параметров K1, Tu
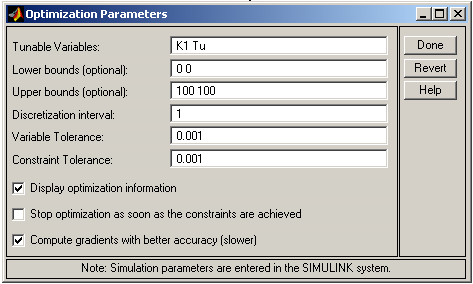
Рис. 5.5 Определение параметров оптимизации К1, Тu
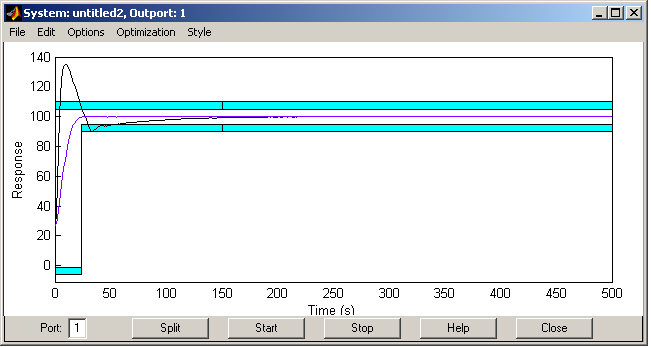
Рис. 5.6 Результат работы блока NCD Outport
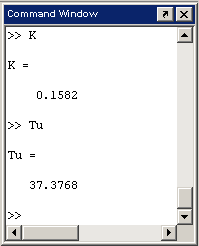
Рис. 5.7 Просмотр оптимизированных параметров К1 и Тu
5.3.3 Построить график переходного процесса выхода объекта управления при введенных оптимальных коэффициентах.
Используя Scope, просмотреть графики переходного процесса (см. рис. 5.8). Проанализировать полученные результаты (см. рис. 5.9).
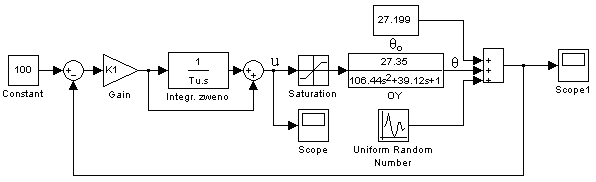
Рис. 5.8 Схема для просмотра графиков переходных процессов
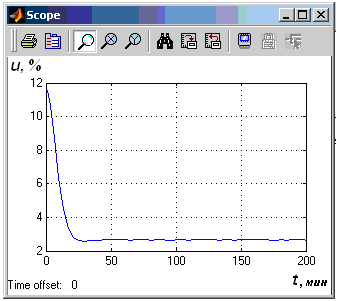
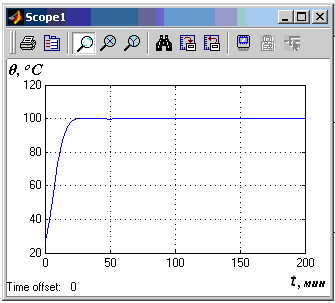
Рис. 5.9 Графики переходных процессов
5.3.4 Сделать выводы по проделанной работе.
5.4 Контрольные вопросы и задания
5.4.1 Оцените качество полученного переходного процесса.
5.4.2 Какой метод оптимизации был применен в работе?
5.4.3 Каким образом влияют настроечные коэффициенты ПИД регулятора на качество переходного процесса?
5.4.4 Для чего в схеме модели контура управления объектом (рис. 2) введен блок «saturation»?
Обязательные составляющие отчета
1. Схема оптимизации параметров ПИ регулятора.
2. Значения оптимальных параметров ПИ регулятора.
3. График переходного процесса и управляющего воздействия.
Лабораторная работа №6
Построение системы регулирования температуры
6.1 Цель работы: освоение методики построения типового контура управления с использованием контроллера.
6.2 Теоретическое введение
В АСУ ТП на нижних уровнях иерархии управления находятся подсистемы автоматического управления и регулирования технологическими агрегатами и отдельными параметрами. Функциональная структура типового контура автоматического регулирования приведена на рис. 6.1.
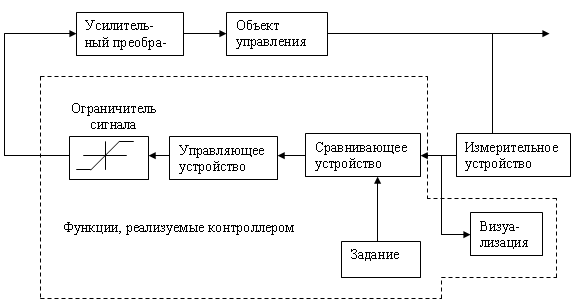
Рис. 6.1 Функциональная схема типового контура регулирования
В данной лабораторной работе рассматривается контур управления температурой в электрической нагревательной печи. Объектом управления является печь, выходная величина которой – температура – измеряется при помощи термопары или термосопротивления.
Для стабилизации значения температуры в STEP 7 при построении контура управления на базе ПИД, ПИ регуляторов рекомендуется использовать блок (TCONT_CP), который реализует функции указанных регуляторов.
Вызов блока регулятора
Схема, изображенная на рис. 6.2, показывает вызов управления в FBD. А в таблице 1 приведено описание некоторых параметров блока ПИД-регулирования (TCONT_CP).
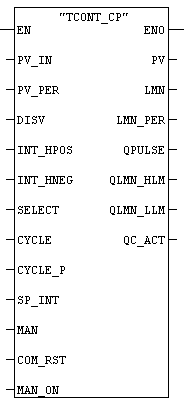
Рис. 6.2 Схема TCONT_CP
Таблица 1. Описание используемых в работе параметров блока TCONT_CP
|
Параметр |
Назначение |
Тип |
Описание |
|
PV_IN |
INPUT (Вход) |
REAL |
Вход переменной процесса (“Process Variable In”). Начальное значение может быть установлено на данном входе или может быть подключена внешняя переменная процесса в формате чисел с плавающей запятой. |
|
SP_INT |
INPUT (Вход)/ OUTPUT (Выход) |
REAL |
Внутреннее значение сигнала уставки (“Internal Setpoint”). Вход “Internal Setpoint” используется для задания уровня сигнала уставки. |
|
MAN |
INPUT (Вход)/ OUTPUT (Выход) |
REAL |
Управляющая переменная, введенная вручную (“Manual Value”). При автоматическом режиме корректируется до значения управляющей переменной. |
|
MAN_ON |
INPUT (Вход)/ OUTPUT (Выход) |
BOOL |
Переключатель на работу в ручном режиме (“Manual Operation On”). Если параметр “Manual Operation On” установлен, то управляющая переменная, введенная вручную (MAN), устанавливается в качестве значения управляющей переменной. 0 – автоматический режим; 1 – ручной режим. |
|
LMN |
OUTPUT (Выход) |
REAL |
Управляющая переменная (“Manipulated Variable”). Действующее значение управляющей переменной в формате числа с плавающей запятой подается на одноименный выход: Manipulated Variable. |
|
QPULSE |
OUTPUT (Выход) |
BOOL |
Выходной импульсный сигнал (“Output Pulse”). ШИМ-модулированное импульсное представление управляющей переменной на выходе: Output Pulse. |
Порядок конфигурирования блока, реализующего ПИ-закон регулирования: