Файл: Решение данных задач поможет в дальнейшем перейти к началу тестирования лабораторного образца сначала в лабораторных, а потом и реальных условиях, провести анализ ошибок,.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.10.2023
Просмотров: 53
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис.12. Основная плата с микросхемой плис
Также система содержит плату управления шаговым двигателем, плату управления бесколлекторным двигателем, плату с фотодатчиком для получения данных об оборотах БК мотора и плату драйвера шагового двигателя.
Рис.13. Вспомогательные модули (драйвер лазера, драйвер шагового двигателя, шлейф для подключения сенсора)
Механика системы представляет собой систему чпу, перемещение по горизонтали (ось х) осуществляется с помощью бесколлекторного двигателя с закрепленным на нем зеркалом, а также оптического датчика, необходимого для отслеживания оборотов. Вращаясь, зеркало разворачивает лазерный луч в линию, а, если использовать модуляцию лазера, в линию, состоящую из точек. Перемещение по вертикали происходит с помощью шагового двигателя с редуктором, к которому прикреплена металлическая пластина, на которой расположены система перемещения по горизонтали и триангуляционный дальномер. Меняя угол наклона пластины, мы смещаем ось х на данный угол, при этом оптическая система не сбивается т.к. вся закреплена на одной пластине.
Рис.14. Внешний вид механики сканера
Рис.15. Внешний вид механики сканера
Разработка процедур калибровки.
Принцип работы устройства заключается в совмещении лазерного триангуляционного дальномера и системы чпу. Чпу работает по четко заданным координатам и направляет лазерный луч на поверхность исследуемого объекта. Получается, что координаты х и у система задает сама и она их знает, а координату z получает исходя из замеров триангуляционного датчика. Процесс калибровки датчика расстояния заключается в вписывании в калибровочную таблицу четко заданных расстояний, измеренных на стенде.
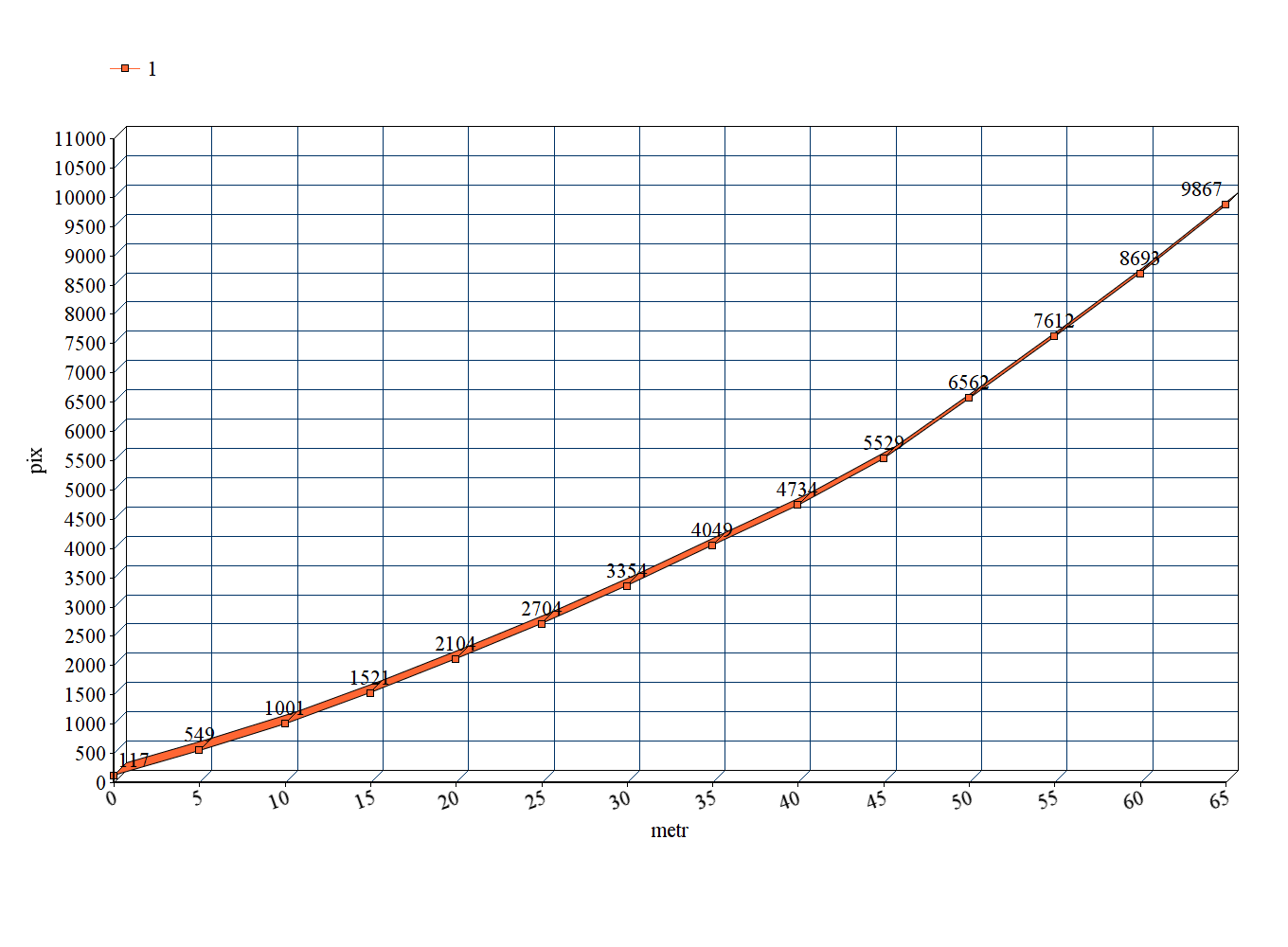
Рис.16. График зависимости расстояния от пикселей
Калибровка оси х заключается в расчете времени поворота зеркала на определенный угол. Для этого в системе предусмотрен оптический датчик необходимый для вычисления времени полного оборота зеркала. Зная время полного оборота
, мы можем вычислить время поворота на необходимый нам угол. Далее, при сканировании, система через эти промежутки времени осуществляет замер расстояния (ось z). После одного полного оборота происходит смещение по оси у путем изменения угла наклона пластины с помощью шагового двигателя. Ось у в калибровке не нуждается, так как в ней использован шаговый двигатель с редуктором, зная передаточное число редуктора и количество шагов двигателя на оборот легко вычислить угол смещения пластины на один шаг.
Заключение
В результате выполнения второго этапа НИОКР были разработаны методы улучшения качества сканирования за счет пространственно-временного анализа. Были собраны и протестированы электрические платы на основе микроконтроллеров и микросхем плис по схемам, разработанным на первом этапе НИОКР. Схема с линейным оптическим сенсором является универсальной и показала отличные характеристики. Использование быстрых ацп и систем на основе плис полностью раскрывают потенциал сенсора. Платы имеют большое количество интерфейсов для связи с пк, что делает их универсальными и упрощает работу. Для данных плат был продуман алгоритм обработки данных и алгоритм управления системой в целом. Для реализации работы этих алгоритмов были написаны программы для микроконтроллеров и плис. По расчетам за первый этап была собрана оптическая систем, состоящая из фокусирующей линзы (объектив), линейного сенсора, вращающегося зеркала и источника лазерного луча, а также система чпу для задания необходимых координат сканирования.
В результате проделанной работы был получен первый образец лазерной сканирующей системы и использованием лазерной точки. Появилась возможность оценить применяемые алгоритмы сканирования и возможность тестировать новые.
Наработки, полученные по ходу изготовления системы можно использовать в проектировании других перспективных системах, таких как высокоточные и быстрые датчики расстояния, безконтактные толщиномеры, линейные камеры технического зрения, точные 3д сканеры и другие.
Таким образом, все задачи, поставленные в целях выполнения данного этапа НИОКР, были выполнены.
Список используемой литературы
-
Скворцов А.В., Мирза Н.С., Алгоритмы построения и анализа триангуляции – М.: Томский государственный университет, 2006. – 160 с. -
Гужов В.И. Методы измерения 3D профиля объектов. – Л.: Новосибирский государственный технический университет, 2015. – 78 с. -
Демкин, В.Н. Лазерные методы и средства контроля геометрических размеров изделий [Текст]/ В.Н. Демкин, В.А. Степанов // Измерительная техника. – 2008. – № 2. – С. 32–35. -
Пат. Российская Федерация МПК G 01 B 11/24. Устройство для лазерного сканирования [Текст]/ Демкин В.Н., Демкин А.В., Шадрин М.В.; заявители и патентообладатели В.Н. Демкин, А.В. Демкин, М.В. Шадрин. – 2012110279/28; заявл. 16.03.2012; опубл. 20.11.2012. Бюл. № 32, 2012. – 285 с.: илл. -
Магда Ю.С. Программирование и отладка С/С++ приложений для микроконтроллеров ARM. - М.: ДМК Пресс, 2016. - 168 с. -
Шапиро Л., Стокман Дж. Компьютерное зрение / Пер. с англ. - М.: БИНОМ, Лаборатория знаний, 2006; Mundy J.L., Porter G.B. Three-dimensional machine vision / Kluver Academic Publishers. 1987