Файл: Методика поиска неисправностей в мпсу микропроцессорная система управления судовой электростанцией.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 128
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Методика поиска неисправностей в МПСУ
Микропроцессорная система управления судовой электростанцией
Широкое внедрение малогабаритных и быстродействующих микропроцессорных средств обработки информации обеспечило создание принципиально новых автоматизированных судовых электростанций с программным управлением.
Архитектура системы
В настоящее время в системах управления на базе микропроцессоров находит применение универсальная архитектура, включающая в себя (рис. 13.4):
-
— измерительный модуль ИМ, обеспечивающий измерения значений параметров и их цифровую обработку; -
— операционный модуль ОМ, управляющий средствами предоставления и ввода информации; -
— управляющий модуль УМ, обеспечивающий управление исполнительными реле и регуляторами; -
— магистральный модуль ММ, обеспечивающий внешний интерфейс по протоколам обмена информации.
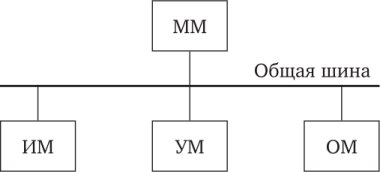
Рис. 13.4.Модульная архитектура системы цифрового управления
Общая шина является частью магистрального модуля.
Вышеперечисленные функции измерения, управления, защиты и контроля реализуются с помощью заложенных в память модулей программ.
Благодаря этому в системе обеспечивается универсальность как по программному, так и аппаратному обеспечению. Каждый модуль создается на основе микропроцессора со стандартным набором машинных команд и с единой операционной системой.
В общем случае в состав микропроцессорных СУ СЭС (рис. 13.5) входят: объект управления ОУ (например, ДГ или СГ); датчики Д; интерфейсные (согласующие) устройства ИУ1 и ИУ2; микро-ЭВМ; усилители мощности УМ; исполнительные механизмы ИМ; пульт управления ПУ. Помимо перечисленных компонентов, в состав таких СУ входят каналы передачи данных, контроллеры и др.
МикроЭВМ — вычислительная машина, представляющая собой совокупность микропроцессора МП, устройств ввода УВв и вывода УВыв информации, запоминающих устройств ОЗУ и ПЗУ.
Процессором ЭВМ называется устройство для автоматической обработки цифровой информации по заданному алгоритму. Процессор, выполненный в виде одной или нескольких микросхем с высокой степенью интеграции, называется
микропроцессором.
Микропроцессоры СУ обычно выполняют ограниченный объем арифметических операций.

Рис 13.5.Структурная схема микропроцессорной системы управления
В состав МП входят арифметико-логическое устройство АЛУ, устройство управления УУ и рабочие регистры РР.
Арифметико-логическое устройство предназначено для выполнения арифметических и логических операций. К первым из них относятся сложение, вычитание, преобразование двоичных чисел и др., ко вторым — инверсия, конъюнкция, дизъюнкция и др.
Устройство управления обеспечивает выполнение операций в определенной последовательности, заданной алгоритмом, а также связи микропроцессора с ОЗУ, ПЗУ, УВв и УВыв.
Рабочие регистры служат для временного хранения и преобразования данных и команд.
Запоминающие устройства реализуют прием, хранение и выдачу информации и программ ее обработки. Их подразделяют на постоянные (ПЗУ) и оперативные (ОЗУ).
Постоянные запоминающие устройства используют для хранения программ для работы МП и констант, причем информация, заложенная в ПЗУ, не теряется при отключении питания.
Оперативные запоминающие устройства применяют для хранения данных, которые обрабатываются при помощи МП.
Характерной особенностью микроЭВМ является наличие стековой памяти.
Стеком называют запоминающее устройство «магазинного» типа, ячейки которого заполняются последовательно (одна за другой). Аналогично, ячейка за ячейкой, происходит вывод информации из стека.
Стековая память позволяет упростить обработку программ и повысить быстродействие АЛУ. В качестве стека может использоваться отдельная микросхема.
Устройства ввода и вывода информации предназначены для ввода обрабатываемой информации в МП, вывода и наглядного представления обработанной информации.
Для ввода информации используют пульты управления ПУ с клавиатурой, выключателями, переключателями и т. д.
Для вывода информации применяют пульты управления с дисплеями, экранами, табло.
Совокупность информационных каналов микроЭВМ называется шинами.
Шины выполняют в виде пучка проводов или печатной схемы и подразделяют на три вида: адресные, данных и управления.
Шина адресная ША предназначена для передачи адреса ячейки памяти с данными или командой от микропроцессора к ОЗУ, ПЗУ, УВв и УВыв. С помощью ША открывается или выбирается правильный тракт для электрического соединения между собой отдельных компонентов микропроцессорной системы. Эту шину называют однонаправленной, так как информация поступает в одном направлении — от МП к перечисленным выше компонентам.
Шина данных ШД — это двунаправленная линия для обмена данными между отдельными компонентами микроЭВМ.
Шина управления ШУ предназначена для передачи тактовых, синхронизирующих сигналов, а также информации о состоянии (статусе) компонентов микроЭВМ.
Объединение различных компонентов микропроцессорной СУ должно проводиться с учетом характера и временных параметров сигналов на стыках между компонентами.
Чтобы сигналы были совместимыми, применяют вспомогательные устройства, называемые интерфейсными. Эти устройства можно разделить на две группы.
Первая группа обеспечивает подключение ОЗУ, ПЗУ, УВв и УВыв к шинам МП и решает задачи синхронизации и управления шинами, а также выборки компонентов, обеспечивающих своевременную передачу данных между МП и выбранным компонентом.
Вторая группа обеспечивает «стыковку» микроЭВМ с внешними компонентами (например, с периферийными устройствами, каналами передачи данных, контроллерами) и преобразование внешних сигналов в сигналы, совместимые с сигналами на шинах, а также обратное преобразование.
Так, если датчики Д имеют аналоговые выходные сигналы, интерфейсное устройство ИУ1 может представлять собой АЦП (аналого-цифровой преобразователь). В то же время для управления работой механизма ИМ (например, серводвигателем ПД генератора) могут использоваться аналоговые сигналы. В этом случае интерфейсное устройство ИУ2 представляет собой ЦАП (цифроаналоговый преобразователь).
В общем случае совокупность унифицированных технических и программных средств, используемых для сопряжения компонентов в вычислительной системе или между системами, называют интерфейсом. Использование стандартного интерфейса для объединения отдельных блоков в локальную вычислительную сеть позволяет применять компьютеры, на дисплеи которых выводится информация о объекте управления.
Пример микропроцессорной системы управления судовой электростанцией
Примером подобной архитектуры является микропроцессорная система управления (МПСУ) судовой электростанцией, структурнофункциональная схема которой изображена на рис. 13.6. В МПСУ электростанции предусмотрена возможность объединения отдельных блоков управления генераторными агрегатами в локальную вычислительную сеть с помощью стандартного интерфейса и использования компьютера верхнего уровня на пульте оператора. На его дисплее можно проследить за рабочим состоянием генераторных агрегатов электростанции, а с его панели управления — производить перепрограммирование величин параметров контроля и управления МПСУ генераторными агрегатами. В ГРЩ встроена система автоматического управления судовой электростанцией (Power Management System, PMS). PMS состоит из двух блоков управления типа БУГ, встроенных в каждую генераторную секцию щита, и одного БУЭ в секции управления (см рис. 13.6).
Программное обеспечение (ПО) системы состоит из двух разделов, взаимодействующих между собой: ПО управления дизель-гене-раторными агрегатами (в блоке БУГ) и ПО управления электростанцией (БУЭ).
В состав каждого БУГ и блока БУЭ входят следующие элементы.
-
1. Модуль измерения параметров ДГ и электростанции, синхронизации и распределения нагрузок ИМ. ИМ измеряет следующие величины:-
— частоту генератора/ген; -
— линейные напряжения между фазами генератора; -
— угол между фазами напряжения генератора (120°); -
— фазные токи генератора Д, 12,13; -
— полную мощность генератора SreH; -
— активную мощность генератора Рген; -
— реактивную мощность генератора QreH; -
— значение cos <р;
-
-
— частоту на шинах ГРЩ; -
— линейные напряжения между фазами на шинах ГРЩ; -
— угол между фазами напряжения на шинах ГРЩ (120°).
Часть этих величин доступна для чтения на дисплее ПУ.
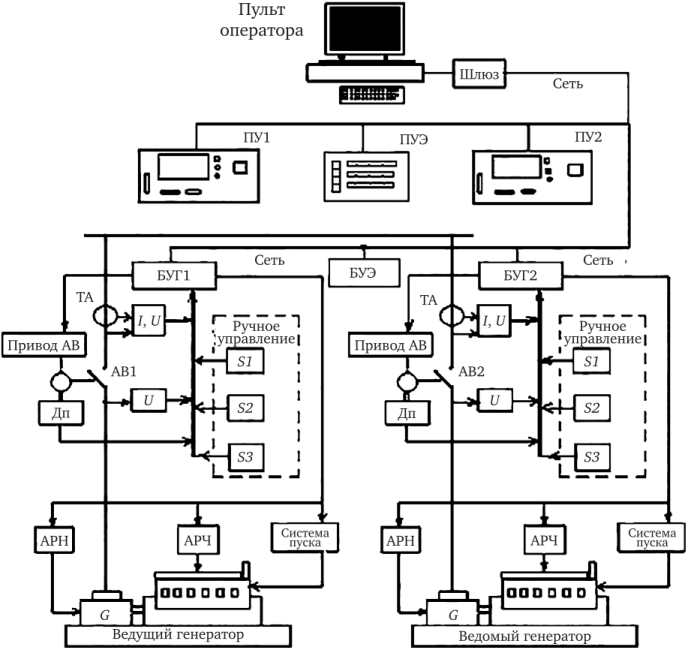
Рис. 13.6.Структурная схема судовой электростанции с МПСУ:
БУГ — микропроцессорный блок управления генератором; БУЭ — микропроцессорный блок управления электростанцией; Дп — датчик положения автомата; АРН — автоматический регулятор напряжения СГ; АРЧ — автоматический регулятор частоты дизеля; І, и — датчики тока, напряжения; ПУ1,2 — панель управления БУГ (панель оператора); ПУЭ — панель управления БУЭ (панель оператора);
51 — переключатель режима «Ручной»/« Автоматический»; 52 — кнопки «Больше»/«Меньше» подачи топлива; 53 — кнопки регулирования уставки напряжения
-
2. Управляющий модуль, осуществляющий выполнение операций по управлению реле и регуляторами системы управления СЭС. Модуль снабжен интерфейсом связи с ПУ и другими БУГ. -
3. Модуль ввода и вывода информации. Модуль содержит входные каналы, каждый из которых может быть конфигурирован как токовый, напряжения или двоичных кодов. Выходные каналы модуля делятся на релейные и аналоговые. Модуль снабжен интерфейсом связи с ПУ. -
4. Модуль защиты по току КЗ, дифференциальная защита.
Для масштабирования величин, измеряемых модулем ИМ, применяются базовые уставки, которые могут настраиваться оператором. В качестве базовых уставок используются номинальные величины перечисленных выше параметров, а также номинальные вторичные токи и напряжения измерительных трансформаторов тока и напряжения. Оператор может снизить мощность генератора путем задания меньшего значения уставки ДГ 5ген ном, что приводит к уменьшению значения активной мощности генератора. Рассчитанное значение активной мощности используется для управления генераторным агрегатом и приводит к уменьшению допустимой для данного генератора нагрузки и к соответствующему изменению значений, используемых функциями управления электростанцией.
Каждый блок БУГ управляет автоматическими выключателями генераторов. Непосредственно от БУГ поступают команды «Пуск» и «Стоп» для приводных двигателей. Каждый блок БУГ имеет панель оператора, установленную на лицевой стороне ГРЩ, на которой отображается параметры управляемого генератора. В комплексе предусмотрено, что блоки управления в ГРЩ имеют встроенный интерфейс. Все блоки автоматики объединены по этому интерфейсу в общую шину (сеть). Взаимодействие блоков управления генераторами и панелей управления (ПУ) осуществляется посредством сети. ПО управления дизель-генераторными агрегатами осуществляет контроль и непосредственное управление агрегатом, выполняя команды оператора или ПО управления электростанцией. ПО управления генераторным агрегатом содержится в памяти каждого БУТ. ПО управления электростанцией управляет электростанцией в целом в соответствии с выбранным режимом (полуавтоматическим, автоматическим, безопасным), формируя команды управления отдельно генераторными агрегатами.
Функции БУЭ. ПО управления электростанцией (БУЭ) реализует следующие функции и режимы управления электростанцией: