ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2021
Просмотров: 112
Скачиваний: 2
Будівельна механіка в прикладах і задачах
Спеціальність – 0921 – “Будівництво”
Тема: Визначення переміщень
Лекція №4. Розрахунок переміщень в статично визначених системах від сталих навантажень .
Мета і задачі:
Метою теми є вміння визначати деформований стан в каркасних будівельних конструкціях – рамах.
Для досягнення мети необхідно вирішення наступних задач:
1. Провести кінематичний аналіз споруди, розділивши раму на основні та другорядні елементи.
2. Визначити опорні реакції і побудувати епюри M, Q, N , починаючи з другорядних елементів. Перевірити епюри.
3. Вибрати одиничний стан в заданій системі.
4. Побудувати епюри згинальних моментів від одиничних навантажень в заданій системі.
5. Визначити шукане переміщення.
4.1 Розрахунок переміщень в статично визначених системах від сталих навантажень
В якості прикладу розрахунку визначені переміщення для розрахункових схем рам на рис. 4.1, де вказано розміри та навантаження.


Рисунок 4.1 – Розрахункові схеми споруд
-
Необхідною умовою кінематичного аналізу системи є перевірка її за формулою П. Л. Чебишева:
W= 3D-2Ш-С0 ; (4.1)
де D – ступінь вільності споруди;
Ш – кількість одиночних шарнірів, одиночний шарнір з’єднує два стержні;
С0 – кількість опорних стержнів системи.
Оскільки задані системи є несучими конструкціями, вони мають бути геометрично незмінними, тобто ступінь вільності споруди W має дорівнювати нулю.
W1=3*2-2*1-4=0; W2=3*2-2*1-4=0;
W3=3*3-2*3-3=0; W4=3*1-2*0-3=0; W5=3*4-2*4-4=0.
– Достатньою умовою перевірки геометричної незмінності системи є перевірка її за способом утворення. Складові рами є комбінацією декількох простих рам. Складову раму можна розбити на прості лише одним способом. Для цього необхідно виділити основну раму (раму 1 поверху), до якої приєднується проста рама другого поверху і так далі.

Рисунок 4.2 – Схеми взаємодії (поверхові схеми) для перших двох варіантів
-
Визначення опорних реакцій в складових рамах розпочинається з простих рам вищого поверху. Записуються рівняння рівноваги статики. Знайдені опорні реакції рам вищого поверху прикладаються у вигляді відпору до рам нижнього поверху і при розрахунку рам нижнього поверху розглядаються у вигляді зовнішнього навантаження, рис. 4.3.
Для побудови епюр M,Q,N позначають характерні перерізи рам.
Епюри моментів будуються зі сторони розтягнутого волокна. Згинальний момент в перерізі рами визначається як алгебрична сума моментів всіх сил, розташованих з однієї сторони перерізу.
Опорні реакції в рамах, які мають замкнений контур, визначаються загальним способом запису рівнянь статики:
![]()
![]()
![]() (4.2)
(4.2)

Рисунок 4.3 – Дослідження ступеня геометричної незмінності систем
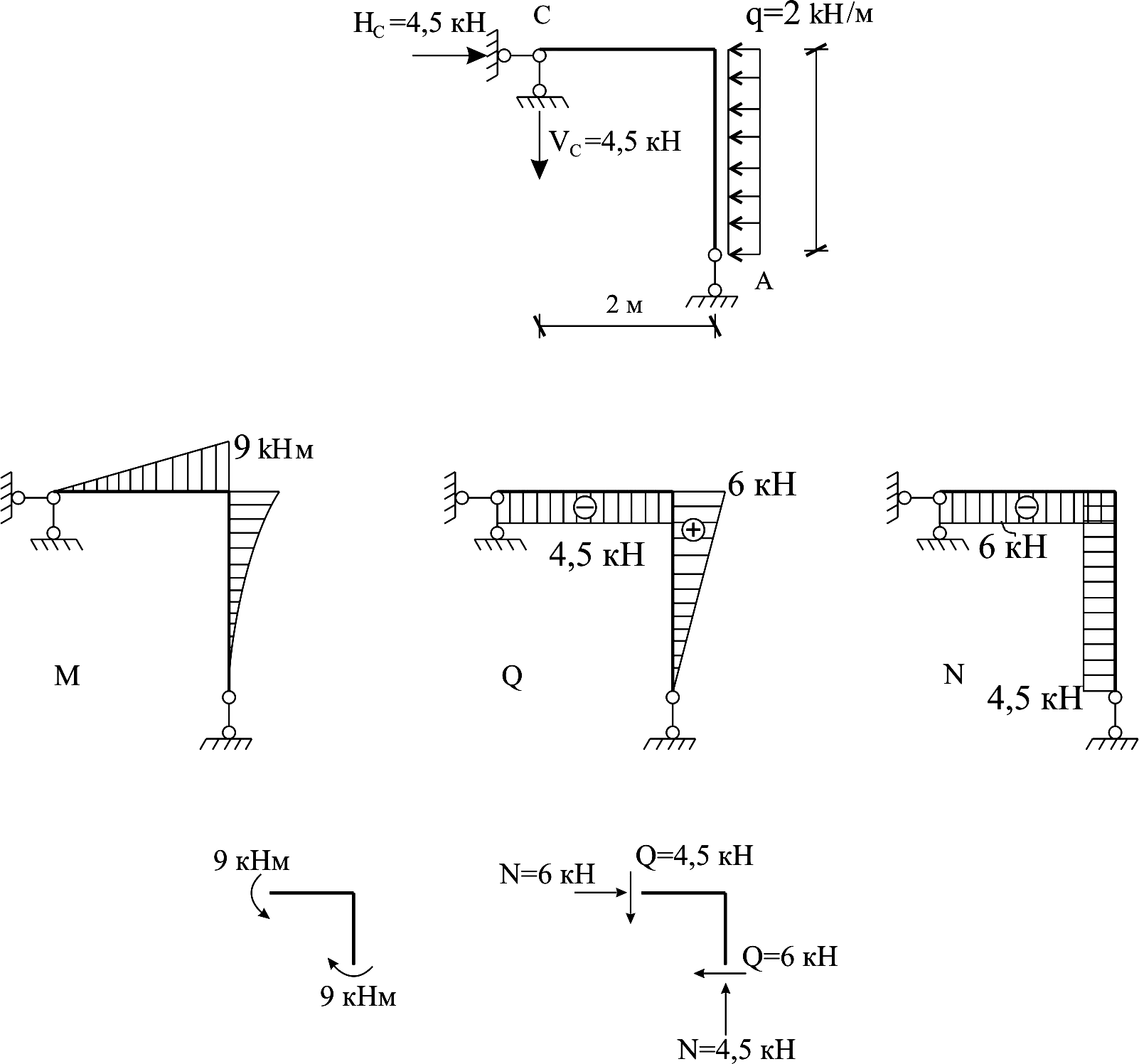
Рисунок 4.4 – Складова рама схеми 1
Розрахунок починається з балочної рами другого поверху, рис. 4.4.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Д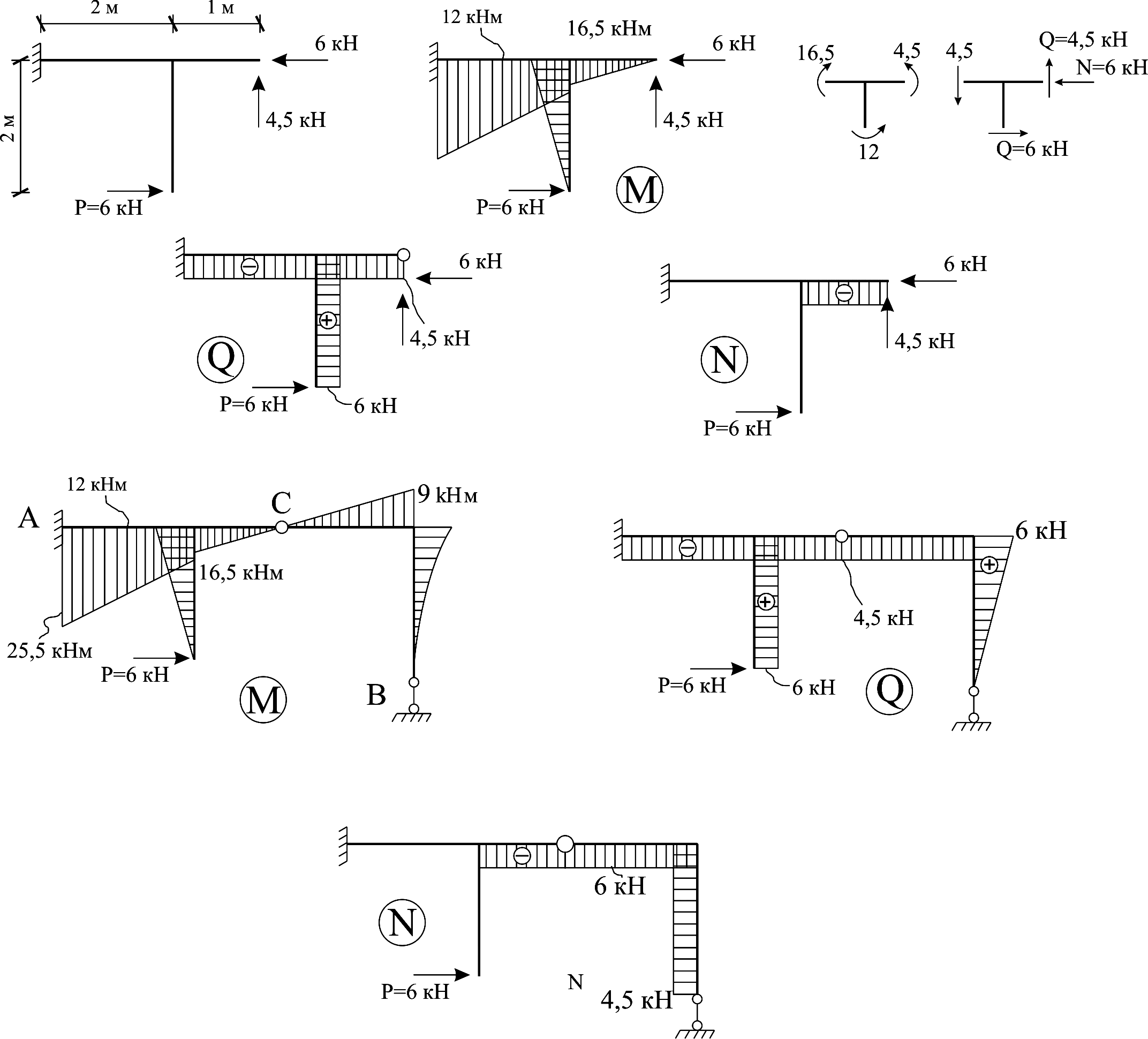 алі
розраховуються консолі рами першого
поверху схеми 1.
алі
розраховуються консолі рами першого
поверху схеми 1.
Р
исунок
4.5 – Побудова епюр M,Q,N
в рамі схеми 1
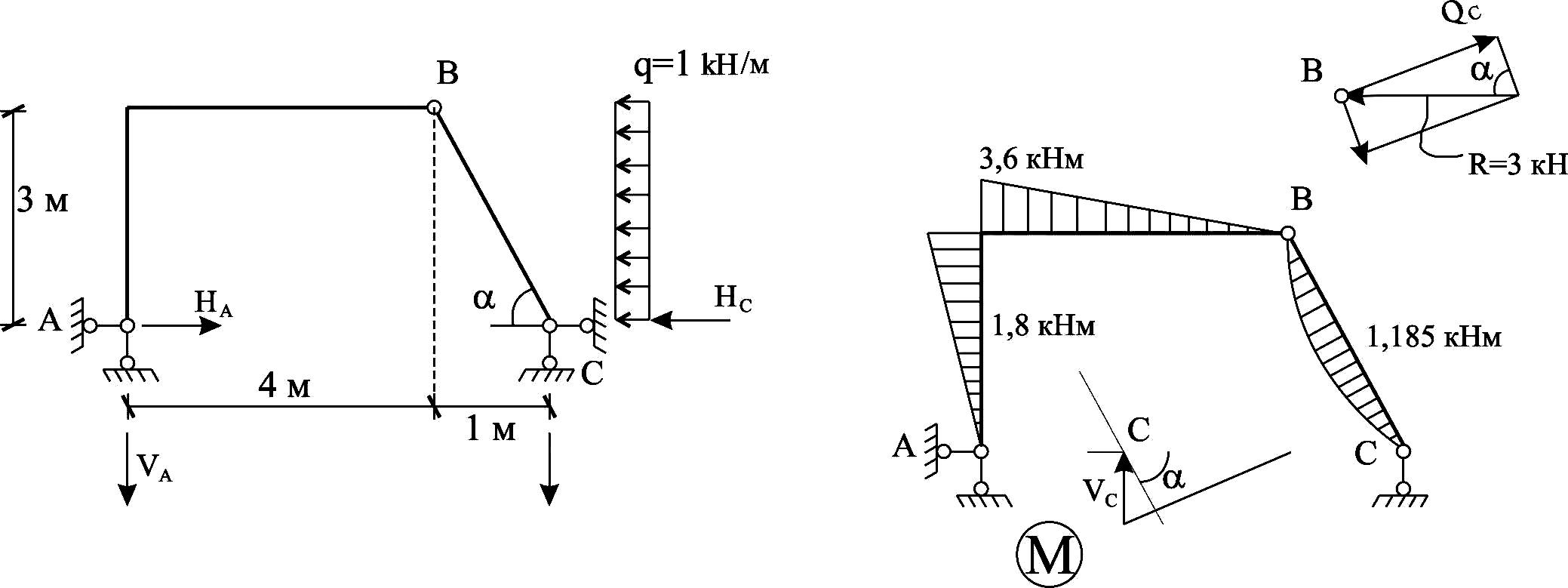

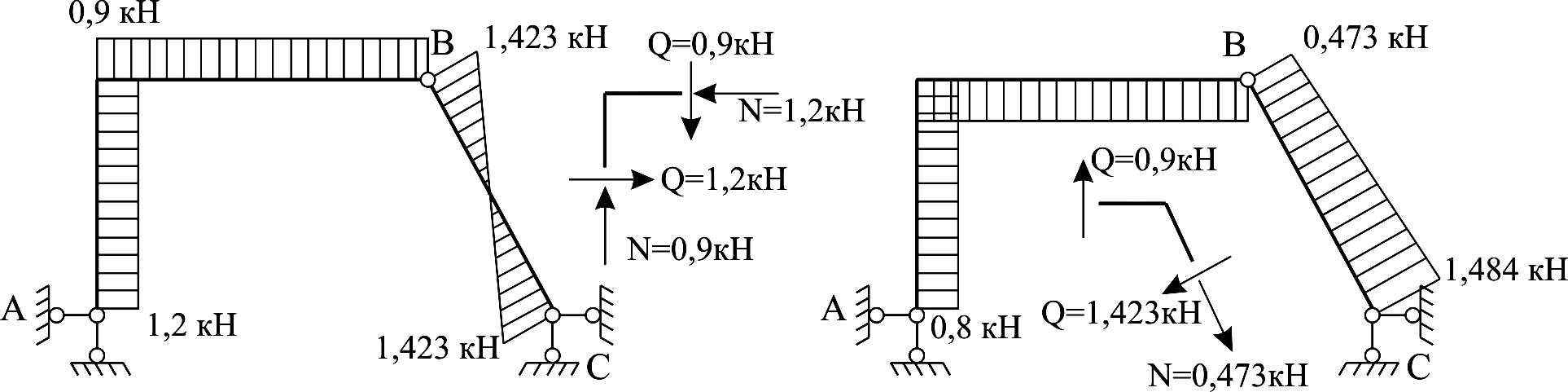

Рисунок 4.6 – Побудова епюр M,Q,N в простій арочній рамі з нахиленим стержнем (схема 2)
Д ля
побудови епюр в складовій рамі, що має
вигляд замкненого контура, зручно
розкласти на прості рами. В даному
випадку немає можливості провести
поверхове розділення складової рами,
та для
ля
побудови епюр в складовій рамі, що має
вигляд замкненого контура, зручно
розкласти на прості рами. В даному
випадку немає можливості провести
поверхове розділення складової рами,
та для
зручності
розрахунку першою розраховується арочна
рама АКВ. Опорні реакції
![]() ,
які визначаються із розрахунку цієї
арочної рами, прикладаються в зворотному
напрямку до верхньої рами. Тоді опорні
реакції в верхній рамі будуть уже
відомі, можна проводити розрахунок.
,
які визначаються із розрахунку цієї
арочної рами, прикладаються в зворотному
напрямку до верхньої рами. Тоді опорні
реакції в верхній рамі будуть уже
відомі, можна проводити розрахунок.




Рисунок 4.7 – Побудова епюр M,Q,N в складовій рамі, яка має замкнений контур

![]()
![]()
![]()
![]()
![]()

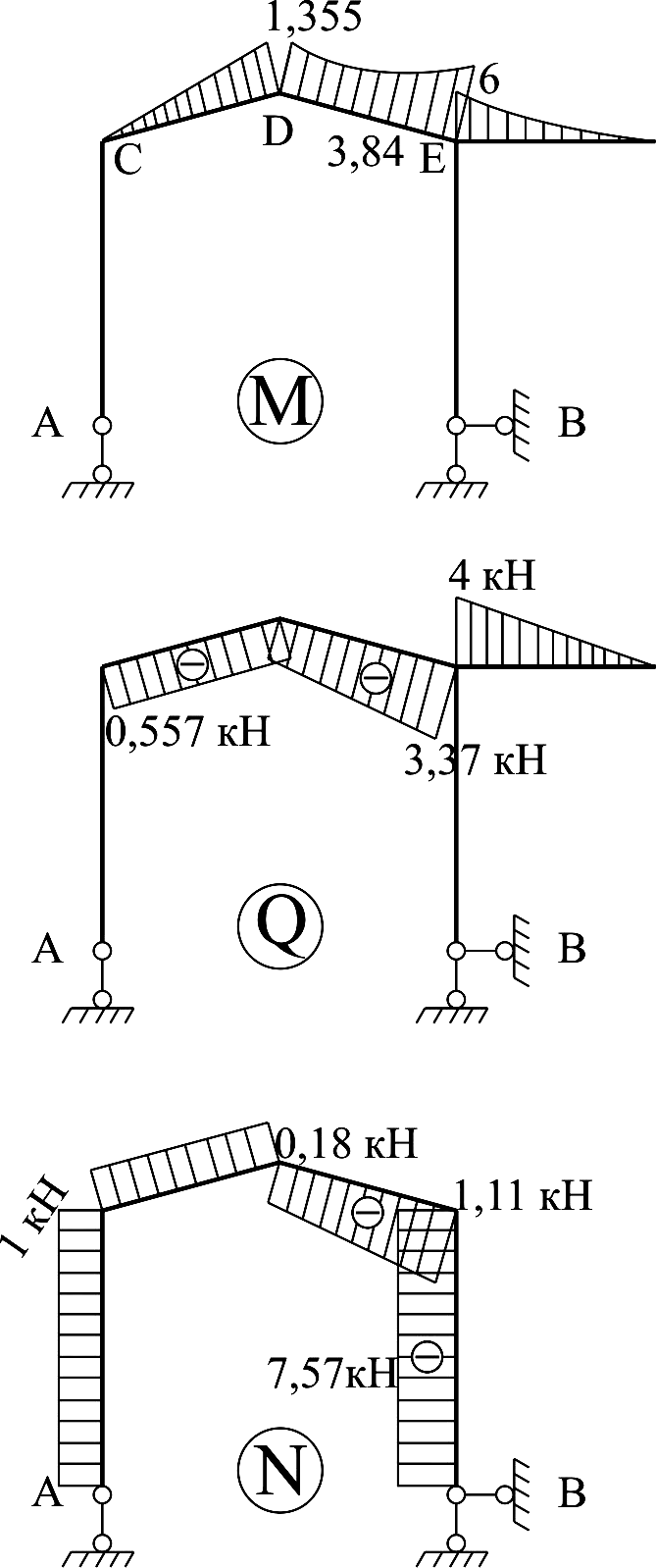
Рисунок 4.8 – Побудова епюр M,Q,N в простій балочній рамі з нахиленим елементом (схема 4)
Розрахунок арочної рами 1 поверху


Рисунок 4.9 – Побудова епюр M,Q,N в другому та першому поверхах
складової рами схеми 5
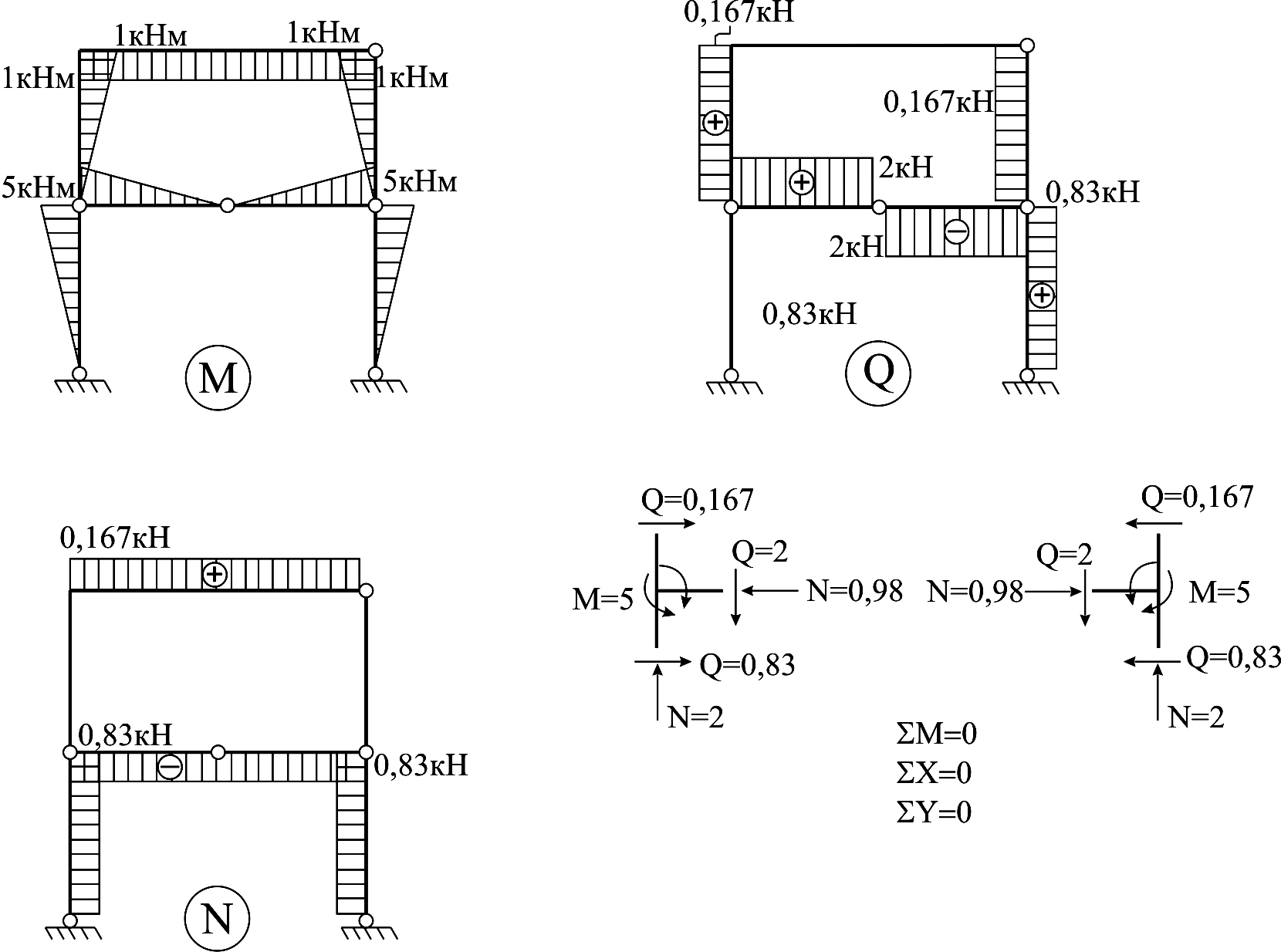
Рисунок 4.10 – Побудова епюр M,Q,N в складовій рамі схеми 5
Для визначення шуканого переміщення необхідно вибрати одиничний стан системи. Навантаження одиничного стану має прийматись таким, щоб воно здійснювало роботу на шуканому переміщенні.
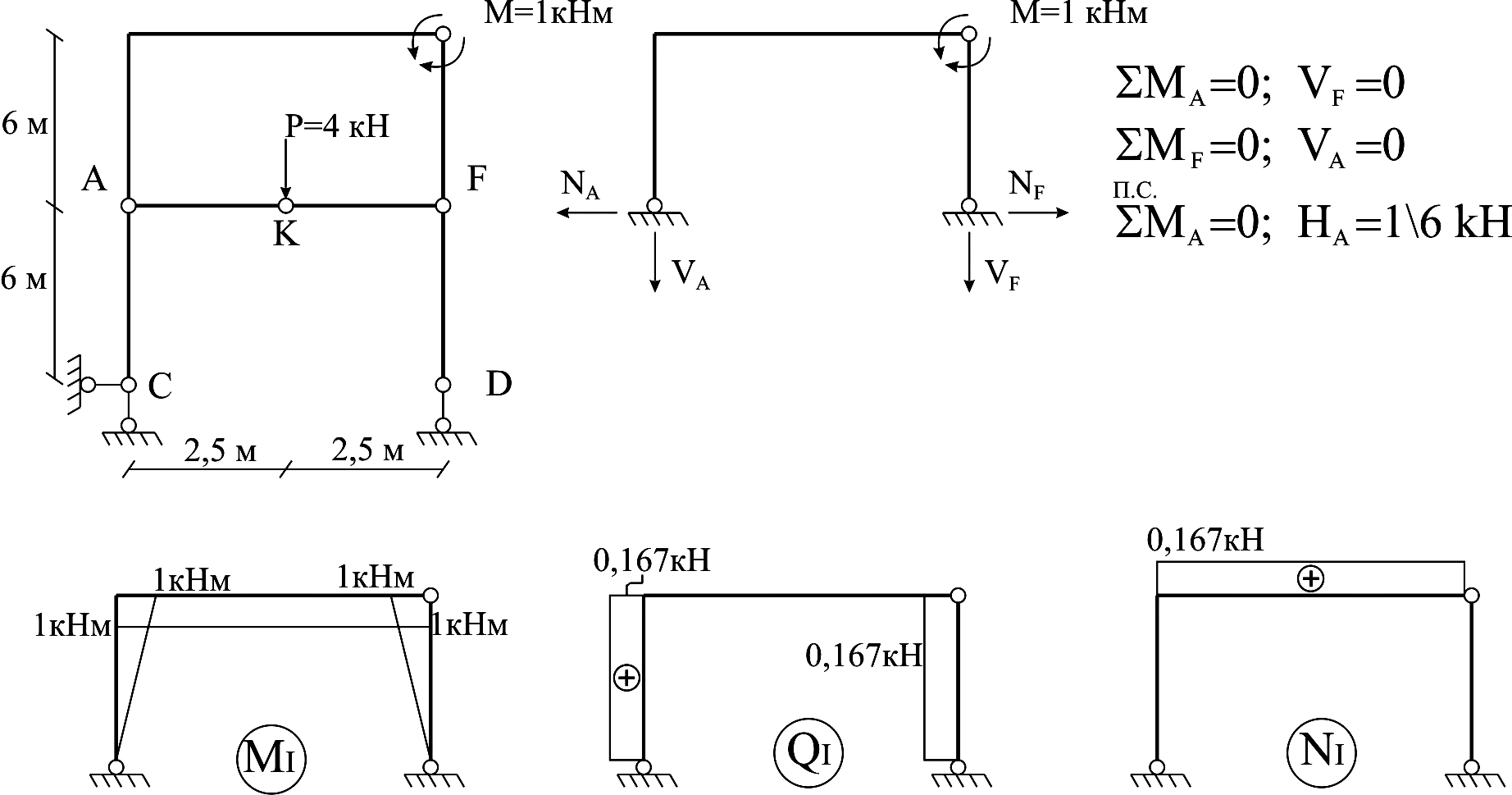
Щоб визначити лінійні зміщення точок системи, наприклад, вертикальне зміщення точки Е в схемі 1, в шуканому напрямку прикладається одинична зосереджена сила Р=1 (рис. 4.11).

Рисунок 4.11 – Епюра М1 від одиничного навантаження рами силою
Р=1 в точці Е в схемі 1
Для знаходження спільного кута повертання перетинів А і С в схемі 2 прикладаються два одиничних зосереджених моменти в шуканих точках (рис. 4.12).

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 4.12 – Епюра М1 від одиничного навантаження точок А і С одиничними моментами в схемі 2
Для визначення кута перелому перетинів в шарнірі (наприклад, в шарнірі С в схемі 3) прикладається пара одиничних зосереджених моментів (рис. 4.13).
Для знаходження кутового переміщення системи, наприклад, кута повертання точки К в схемі 4, до шуканої точки прикладається одиничний зосереджений момент М=1 (рис. 4.14).
Щоб знайти зближення точок системи, яке знаходиться під дією зовнішніх навантажень, наприклад, зближення точок А і В в схемі 5, достатньо в шуканому напрямку прикласти дві одиничні зосереджені сили (рис. 4.15).
4.2. Формула Мора
Шукане переміщення визначається за формулою Мора:
 , (4.3)
, (4.3)
де
![]() – внутрішні зусилля в одиничному стані;
– внутрішні зусилля в одиничному стані;
![]() -
-
зусилля від зовнішнього навантаження в дійсному (вантажному) стані;
EI – згинальна жорсткість; EA – жорсткість при розтягу чи стисненні; GA – жорсткість при зсуві;
r – коефіцієнт форми перерізу.
При визначенні переміщень в рамах, балках з достатньою для інженерних розрахунків точністю (97%), в формулі Мора можна залишити лише першу складову:
![]() (4.4)
(4.4)
Р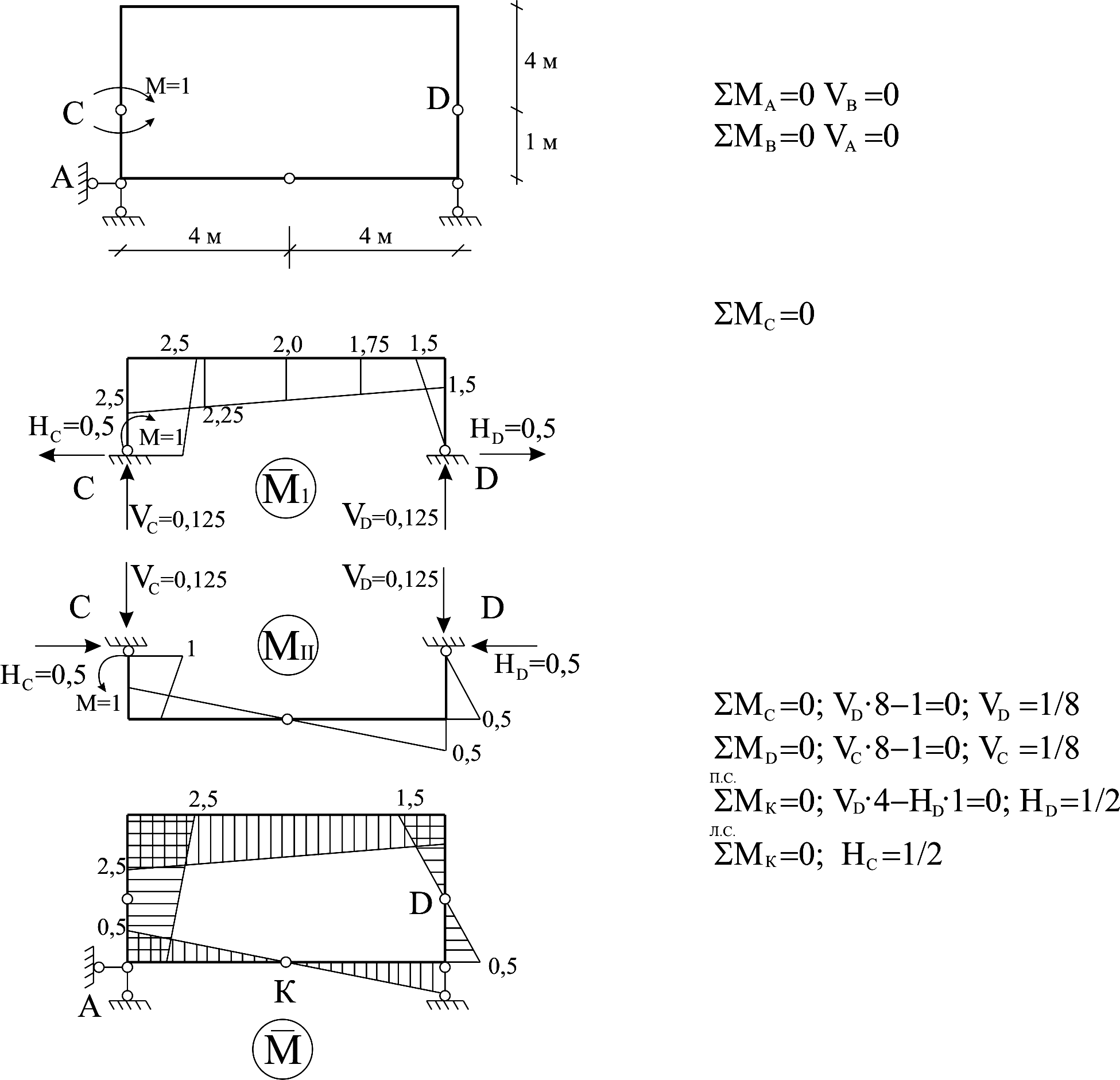 исунок
4.13 – Епюра М1 від одиничного навантаження
шарніра С о
диничними
зосередженими моментами М=1 в схемі 3
исунок
4.13 – Епюра М1 від одиничного навантаження
шарніра С о
диничними
зосередженими моментами М=1 в схемі 3

Рисунок 4.14 – Епюра М1 від одиничного навантаження точки К одиничним зосередженим моментом М=1 у схемі 4
При цьому потрібно мати 2 стани системи: дійсний стан та одиничний
стан.
-
Техніка обчислення інтегралів за формулою Мора
полягає в наступному:
І. Перемноження дійсної і одиничної епюр можна проводити за правилом А.Н. Верещагіна:
![]() (4.5)
(4.5)
де
![]() –
площа вантажної епюри ;
–
площа вантажної епюри ;
уі – ордината
на епюрі
![]() під центром ваги площі вантажної епюри.
під центром ваги площі вантажної епюри.
Обмеження при використанні (4.5) полягає в тому, що:
-
жорсткість стержня по його довжині має бути постійною;
-
одна із епюр має бути прямолінійною, тоді друга може бути криволінійною, при цьому площу потрібно брати з криволінійної епюри.

![]()
![]()
![]()
![]()

Рисунок 4.15 – Епюра М1 від одиничного навантаження точок А і В одиничними силами Р=1 за напрямком їх зближення у схемі 5
ІІ. Перемножити епюри можна користуючись формулою Карноухова– Сімпсона:
![]() ,
(4.6)
,
(4.6)
де
–
![]() – ординати епюр моментів одиничного
стану на початку, посередині, в кінці
стержня;
– ординати епюр моментів одиничного
стану на початку, посередині, в кінці
стержня;
![]() - ординати епюр
моментів вантажного стану на початку,
посередині, в кінці стержня;
- ординати епюр
моментів вантажного стану на початку,
посередині, в кінці стержня;
l – довжина стержня.
Значення обчислених переміщень для схем:
![]() Схема
1.
Схема
1.
![]()
Схема 2.
![]()
![]()
![]() .
.
![]()
![]() Схема
3.
Схема
3.
![]()
![]()
![]()
![]() Схема
4.
Схема
4.
![]()
![]()
![]() .
.
![]()
![]() Схема
5.
Схема
5.
![]() .
.
Підсумок.
Після проходження даної лекції студент має вміти знаходити переміщення в будівельних конструкціях, правила визначення яких закладені в діючих нормативних документах та наведені в даній лекції.
Контрольні питання.
1. Які два стани системи потрібно мати розрахованими для визначення переміщень ?
2. Для формування одиничного стану системи в яких випадках потрібно прикладати: одиничну зосереджену силу і в якому напрямку; одиничний зосереджений момент; дві зосереджені сили назустріч одна одній?
3. Чи потрібно проводити кінематичний аналіз системи?
Джерела інформації.
1. Баженов В.А., Іванченко Г.М., Шишов О.В. Будівельна механіка. Розрахункові вправи. Задачі. Компютерне тестування.-К.: “Каравелла”, 2006.-344с.
2. Баженов В.А., Гранат С.Я., Шишов О.В. Будівельна механіка. Компютерний курс.-К.: Вища школа, 1999.-540с.
3. Баженов В.А. Будівельна механіка.-К.: Вища школа, 2000.-670с.
4. Бутенко Ю.Н. Строительная механика. – К.:”Вища школа”, 1989,- 480с.
5. Бутенко Ю.И. Строительная механика. Руководство к практическим занятиям. - К.: Вища школа, 1984.- 327 с
6. Дарков А.В. Шапошников Н.Н. Строительная механика. - М.:”Высшая школа”, 1986,-607с.
7. Клейн Г.К. Руководство к практическим занятиям по курсу строительной механики (статика стержневых систем). – М.:”Высшая школа”, 1980, -384с.
8. Моргун А.С. Теорія споруд, ч. ІІІ, Будівельна механіка – Вінниця:
ВДТУ,1997,90 с.
9. Моргун А.С. Практикум з будівельної механіки. – Вінниця: ВДТУ, 1997,90 с.
10. Піскунов В.Г. Опір матеріалів з основами теорії пружності і пластичності. Ч.І. Книга 3. Опір дво- і тривимірних тіл. - К.: Вища школа, 1995.- 272 с.
Глосарій.
1.Кінематичний аналіз –перевірка геометричної незмінності –деформації елементів можливі лише в результаті прикладення навантаження.
2. Статична визначеність –для розрахунку внутрішніх зусиль достатньо рівнянь статики.
3. Вантажний стан системи – епюри внутрішніх зусиль від дії зовнішнього навантаження реакції .
4. Одиничний стан системи – епюри внутрішніх зусиль від дії одиничного зовнішнього навантаження, прикладеного по шуканому напрямку.