Файл: Отчет по лабораторной работе 4 Моделирование нелинейных систем управления.docx
Добавлен: 22.11.2023
Просмотров: 128
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Теория автоматического управления
Отчет по лабораторной работе № 4
Моделирование нелинейных систем управления
Выполнил:
студент гр. ЭСП – 31 Калмыков А.Ю.
Проверил:
профессор Доровской В.А.
Вариант
7
Керчь 2016
-
Описание системы
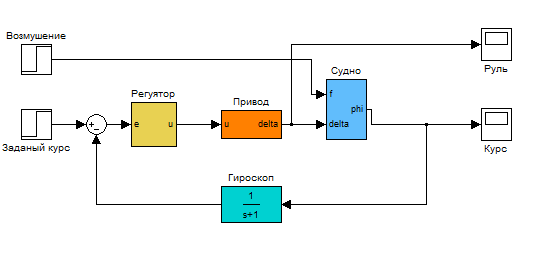
Исследуется нелинейная система управления судном по курсу, структурная схема которой показана на рисунке.
Движение судна описывается линейной математической моделью в виде передаточной функции
 , где
, где  рад/сек,
рад/сек,  сек,
сек, Линейная модель привода представляет собой интегрирующее звено с передаточной функцией
 ,
,  сек,
сек, охваченное единичной отрицательной обратной связью. На угол перекладки руля и скорость перекладки накладываются нелинейные ограничения
 ,
,  .
.Измерительное устройство (гирокомпас) моделируется как апериодическое звено с передаточной функцией
 ,
,  сек,
сек,В качестве управляющего устройства используется ПИД-регулятор с передаточной функцией
 ,
, где

,
 сек,
сек,  сек,
сек,  сек,
сек,-
Построение нелинейной модели
-
модель системы управления с выделенными подсистемами
-
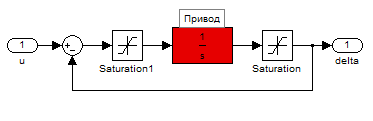
нелинейная модель привода
-
нижний и верхний пределы насыщения
блок Saturation: от
 до
до 
блок Saturation1: от
 до
до 
эти величины объясняются тем, что …
-
Сравнение линейной и нелинейной моделей
-
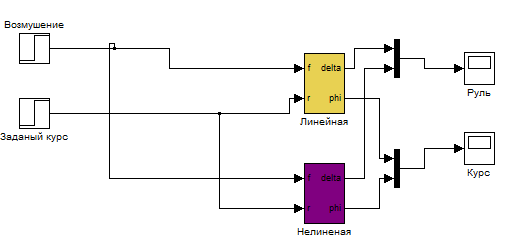
структурная схема системы для сравнения линейной и нелинейной моделей
-
скрипт для построения и оформления графиков
close(1);
figure(1);
subplot(2,1,1);
...
set(h(1),'LineWidth',1.5)
set(h(2),'LineWidth',1.5)
-
переходные процессы при изменении курса на 10 градусов
-
расхождение между результатами моделирования линейной и нелинейной системы объясняется тем, что … -
наибольшее влияние оказывает … (какая нелинейность?), потому что … -
в то же время … (что можно сказать о второй нелинейности?) -
переходные процессы при изменении курса на 90 градусов
-
при больших углах поворота наблюдается существенное расхождение между процессами в линейной и нелинейной системах, потому что … -
в этом случае … (как влияют нелинейности?)