Файл: Реферат Зарубежные программы обработки однолучевых эхолотов студент группы 3г пучкова Е. А.docx
Добавлен: 23.11.2023
Просмотров: 72
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное
учреждение высшего образования
«СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ГЕОСИСТЕМ И
ТЕХНОЛОГИЙ»
(СГУГиТ)
Основы морской геодезии
Вариант №8
Реферат
Зарубежные программы обработки однолучевых эхолотов
Выполнил: студент группы 3Г
Пучкова Е.А,
Проверил: Кобелева Н.Н.
Новосибирск 2023
Оглавление
Введение 3
Глава 1. Виды и принцип работы эхолота 4
Глава 2. Зарубежные программы обработки однолучевых эхолотов 8
Вывод 12
Введение
На современном этапе наибольшие достижения в создании эффективных, малогабаритных, надежных средств вычислительной техники послужили толчком развития гидрографической и геодезической аппаратуры и методики её использования в различных морских условиях в реальном времени. Эти успехи отразились на совершенствовании программного обеспечения обработки результатов морских гидрографических наблюдений, выполняемых с помощью современной аппаратуры, как правило, объединенной в комплексы различной конфигурации.
За последние 10 - 15 лет существенно возрос интерес к поиску, разведке и добыче полезных ископаемых на шельфе и в глубоководных районах Мирового океана. В связи с этим возросли требования как к точности и оперативности определения положения носителей (суда, подводные аппараты, буровые станки, зонды и т. п.) морской геофизической, геологической аппаратуры, так и к качеству и надежности информации о рельефе морского дна в реальном времени.
При исследованиях удаленных и слабоизученных акваторий морей и океанов, для обеспечения установки и регулярного функционирования буровых и добывающих платформ на шельфе и в открытом океане, и для других морских операций широко используются высокоточные средства и методы динамично развивающихся спутниковых навигационных систем (СНС) в комплексе с гидроакустическими навигационными системами (ГНС), эхолотами, гидролокаторами и другими датчиками навигационной и геофизической аппаратуры.
Известно, что главная часть гидрографических съемок морского дна выполняется и будет выполняться в будущем эхолотами.
Глава 1. Виды и принцип работы эхолота
Эхолот представляет собой электронный прибор, предназначенный для изучения и контроля подводного пространства. Принцип работы эхолота заключается в использовании ультразвукового сигнала, который, отражаясь от подводных объектов, обрабатывается эхолотом и, в зависимости от того, за какое время сигнал вернулся к эхолоту от объекта, исследуется расстояние до объекта.
Кроме структуры дна, на экране эхолота также будут отражены и рыбы. Также эхолот позволяет определить состояние дна изучаемого водного бассейна. Сигнал эхолота может быть различен, он зависит от поверхности дна. Например, илистое дно будет показано как более рассеянное, чем сигнал от жесткого дна. Поэтому на экране эхолота илистое дно будет выглядеть размытым и нечетким, а поверхность жесткого дна на дисплее отображается насыщенным темным цветом без размытей.
С помощью эхолота и датчиков, которые могут быть встроены или же поставляться отдельно, можно определить температуру воды, скорость судна относительно воды, с которого проводятся исследования, скорость течения, пройденный путь. При изучении полученных данных от эхолота возможным становится определение нахождения термоклина.
Условно эхолоты можно разделить на два типа: однолучевые и многолучевые. Однолучевые эхолоты считаются простейшими эхолотами. Принцип работы однолучевых эхолотов основан на следующем явлении: антенна эхолота излучает ультразвуковые импульсы в конусном луче и улавливает сигналы, отраженные от объектов и вернувшиеся на антенну. По измерениям времени между излучением импульса и возвращением отраженных сигналов определяются расстояния до обнаруженных объектов и глубина, как расстояния до ближайшей точки поверхности дна. Эхолот определяет только расстояния до обнаруженных объектов. Каждому излучаемому антенной импульсу соответствует один вертикальный столбец экрана. Обнаруженные при очередном импульсе объекты изображаются в виде штрихов в правом масштабированном столбце экрана. Затем изображение на экране сдвигается на один столбец влево, а на освободившееся место в крайнем правом столбце поступают результаты следующего измерения. Таким образом формируется гидроакустическое изображение на экране. При перемещении плавсредства с установленным эхолотом картина дна на мониторе соответствует рельефу дна под антенной эхолота.
Недостатки и плюсы:
-
Измерение геометрических параметров объектов точечного и комбинированного типа с помощью однолучевого эхолота не представляется возможным, в связи с вертикальной направленностью сигнала и низкой плотностью точек. -
Измерение геометрических параметров объектов площадного типа с помощью однолучевого эхолота теоретически возможно, при условии достаточно большого числа точек измерений на промерных галсах, расположенных над поверхностью объекта. -
При измерении линейно протяженных объектов с использованием однолучевого эхолота, основным условием также является увеличение количества точек путем сгущения сетки съёмочных галсов. Одиночные галсы позволяют обеспечить надёжное обнаружение только для таких объектов, размеры которых соизмеримы с размерами междугалсового расстояния. Для подводных трубопроводов и прочих объектов поиска, имеющих протяженность менее, чем шаг междугалсового расстояния, вероятность их обнаружения оказывается крайне низкой.
Многолучевые эхолоты применяются для выполнения промерных работ на больших площадях, с большой производительностью, с большой детальностью и с гарантированным сплошным покрытием дна используются многолучевые эхолоты. Принцип работы многолучевых эхолотов основан на формировании с использованием антенной решетки и/или электронным способом пучка узких лучей, расходящихся веером в плоскости, перпендикулярной направлению движения судна. С учетом параметров движения судна (курс, крен, дифферент, вертикальные перемещения) и распределения скорости звука по глубине обследуемой акватории в результате каждого сканирования получается набор данных по глубинам акватории по линии, перпендикулярной траектории движения судна. 10 Ширина области зондирования, как правило, кратна глубине (обычно составляет от 3 до 7 глубин). Число лучей, так же, как и методы их формирования и обработки информации, в различных моделях многолучевых эхолотов существенно различаются. Обязательным дополнением к самому многолучевому эхолоту являются: навигационное оборудование для определения точных координат судна-носителя, система определения параметров движения судна (гирокомпас, крен-дифферент, датчик вертикальных перемещений), датчик определения вертикального распределения скорости звука в воде (STD-зонд).
Недостатки и плюсы:
-
Многолучевые эхолоты отлично подходят для качественного подробного акустического освещения дна, что открывает возможности для детального изучения дна, путем создания его трехмерной модели, это было невозможно при использовании однолучевых эхолотов. Кроме того, с помощью многолучевых систем, возможно надежное обнаружение объектов на поверхности дна. -
Отсюда, многолучевой эхолот является эффективным инструментом не только для поиска, но и для уверенного измерения геометрических параметров любых типов подводных объектов. -
Многолучевой эхолот производительнее однолучевого в задачах высокоточной съемки рельефа дна для обеспечения безопасности плавания. Связано это с шириной охвата многолучевого эхолота по сравнению с однолучевым, что также уменьшает количество промерных галсов.
Погрешности эхолотов, обусловленные внешними условиями.
-
Они возникают при отклонении действительной скорости распространения звука от расчётной. Скорость распространения звука в морской воде зависит от температуры, солёности и гидростатического давления. При повышении температуры на 1O скорость уменьшается на 4 м/с, при увеличении солёности на 1 % возрастает на 1 м/с, при увеличении глубины на 10 м повышается на 0,2 м/с. При расчётной скорости 1500 м/с ошибка ΔН не превышает 3,5 % измеряемой глубины для любой точки Мирового океана. -
Влияние качки. При качке судна ось антенны отклоняется от вертикали. В результате эхолот показывает глубину несколько больше действительной. Кроме того, когда угол крена превышает половину угла диаграммы направленности антенны, показания эхолота могут пропадать. При плавании на волнении, особенно в балласте, судно носовой частью захватывает атмосферный воздух. Пузырьки воздуха, попавшие под корпус судна, вызывают сильное рассеяние, отражение и поглощение звуковой энергии, создавая помехи и даже длительные перерывы в индикации глубины. -
Влияние структуры грунта. Наиболее чёткая индикация получается при твёрдом грунте (каменная плита, плотный песок и т.п.). Однако в отдельных случаях при малых глубинах индикация от каменной плиты может пропадать ввиду зеркального отражения эхоимпульса и непопадания его на вибратор-приёмник. При илистом грунте индикация от верхней границы ила может не быть, а появится индикация от подстилающего твёрдого грунта. Может появиться и двойная индикация: от верхней границы ила и от подстилающего грунта. Двойная индикация хорошо просматривается на самописце.
Глава 2. Зарубежные программы обработки однолучевых эхолотов
Современный уровень точности однолучевых, многолучевых эхолотов, ГЛБО, спутниковых навигационных систем, гидроакустических навигационных систем при их комплексном использовании позволяет значительно повысить качество определения рельефа морского дна и батиметрических карт. Это требует продвинутого программно-математического (ПМО) обеспечения. Для решения отдельных задач рядом зарубежных фирм разработано ПМО, ориентированное на конкретного пользователя.
-
CARIS LOTS
Фирмой CARIS (Канада) создан пакет программ CARIS LOTS для определения границ шельфа с использованием только однолучевого эхолота и ГЛБО.
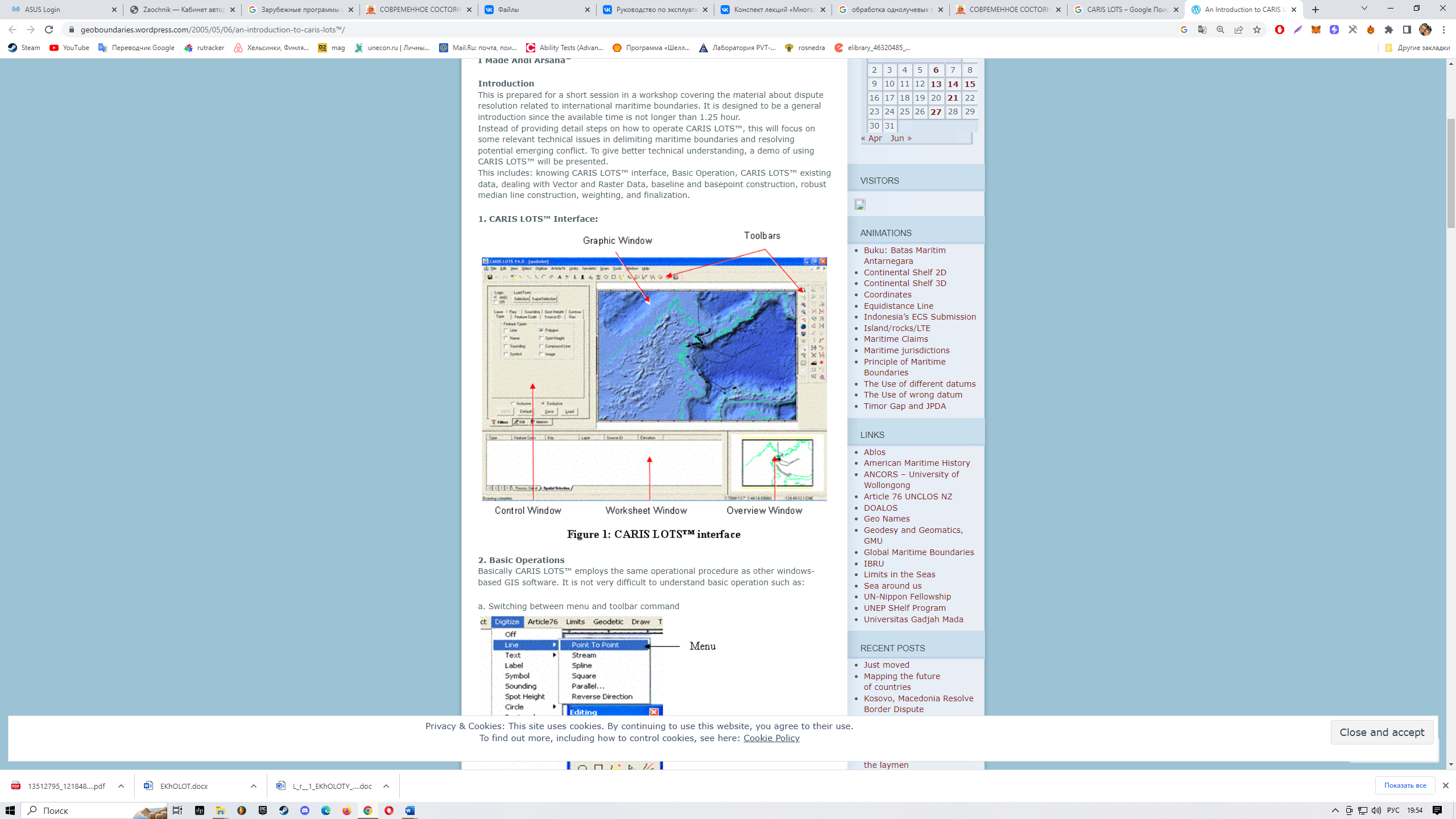
Рисунок 1 – Интерфейс программы CARIS LOTS.
-
GARMIN
Карты водных объектов Garmin Quickdraw можно просмотреть на комбинированном экране или отдельно на карте. Количество сохраняемых данных зависит от доступного объема памяти устройства, источника данных сонара и скорости судна во время регистрации данных. Использование однолучевого эхолота позволяет увеличить время записи. Предположительно, на устройство можно записать около 1500 часов данных.
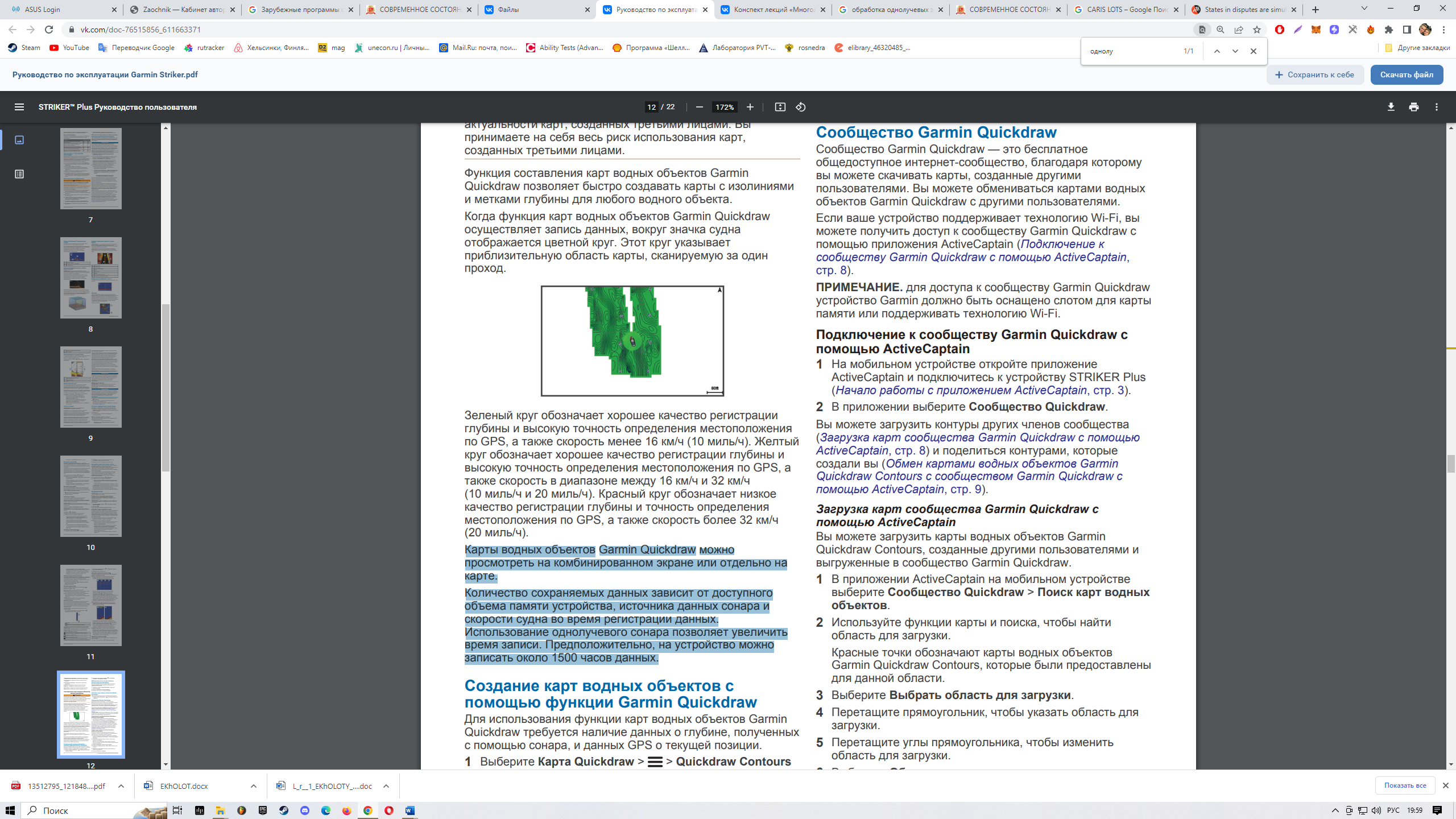
Рисунок 2 – Карта вокруг судна
Функция составления карт водных объектов Garmin Quickdraw позволяет быстро создавать карты с изолиниями и метками глубины для любого водного объекта. Когда функция карт водных объектов Garmin Quickdraw осуществляет запись данных, вокруг значка судна отображается цветной круг. Этот круг указывает приблизительную область карты, сканируемую за один проход.
Зеленый круг обозначает хорошее качество регистрации глубины и высокую точность определения местоположения по GPS, а также скорость менее 16 км/ч (10 миль/ч). Желтый круг обозначает хорошее качество регистрации глубины и высокую точность определения местоположения по GPS, а также скорость в диапазоне между 16 км/ч и 32 км/ч (10 миль/ч и 20 миль/ч). Красный круг обозначает низкое качество регистрации глубины и точность определения местоположения по GPS, а также скорость более 32 км/ч (20 миль/ч).
-
HUMMINBIRD
Эхолоты под торговой маркой Humminbird уже более 40 лет производит эхолоты для рыбалки. Компания Humminbird, в числе первых, приступила к производству оборудования