Добавлен: 29.11.2023
Просмотров: 20
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение
высшего образования
“Уральский государственный университет путей сообщения"
(ФГБОУ ВО УрГУПС)
Кафедра «Вагоны»
Отчет ОБ ЛАБОРАТОРНОЙ РАБОТЕ №4-5
По дисциплине: «Система автоматизированного производства вагонов»
Тема: «Создание модели автомотрисы» вариант 6
Преподаватель: Студент группы:
доцент к.т.н. ПСгв-320
Митраков А.С. Домрачев П.А.
Екатеринбург
2022
Содержание
ЗАДАНИЕ 4
1.1Создание модели колёсной пары 5
1.2Моделирование динамики отдельной колёсной пары 5
1.Создание автомотрисы АС4: 5
2.1Создание нового объекта – рельсового экипажа. 7
2.2Добавление колёсных пар. 7
2.3Создание графических образов. 8
2.4Добавление букс к модели автомотрисы 8
2.5Добавление кузова к модели автомотрисы 8
2.6Добавление силовых элементов 9
2.7Проектирование движения созданной автомотрисы АС4 11
2.Результат моделирования. 11
Вывод 12
ЗАДАНИЕ
-
Создание модели колёсной пары. -
Моделирование движения колёсной пары по идеально ровному пути. -
Создание модели автомотрисы согласно выданному вариантом.
В соответствии с индивидуальным вариантом:
-
Длина базы, 6,2 м; -
Масса экипажной части, 38,3 т; -
Положение центра массы, 1,525.
Моделирование движения отдельной колёсной пары.
-
Создание модели колёсной пары
Добавление колёсной пары согласно:
-
Добавление параметра v0
Рисунок 1 Колёсная пара
-
Моделирование динамики отдельной колёсной пары
Подготовка среды моделирования динамики рельсового экипажа:
-
Задали профили колёс и рельсов
Движение по идеально ровному пути:
-
Задали прямой путь -
Скорректировали настройки численного метода интегрирования уравнений движения. -
Сместили колёсную пару от положения равновесия на 1 мм и проанализировали её движение.
-
Создание автомотрисы АС4:
Описание модели
Расчётная схема:
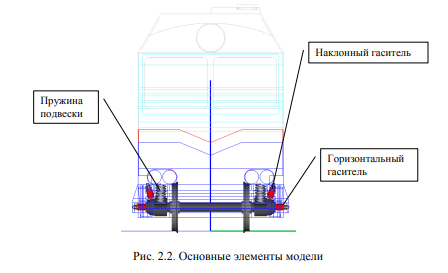
Рисунок 2 Основные элементы модели
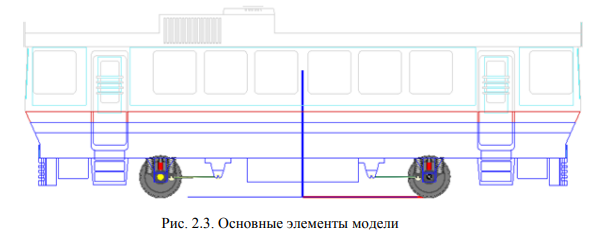
Рисунок 3 Основные элементы модели
Модель включает следующие элементы:
1. две подсистемы «колёсная пара»;
2. четыре графических объекта (кузов, гаситель, пружина, поводок);
3. пять тел (кузов и четыре буксы);
4. шарнир, вводящий координаты кузова и четыре вращательных шарнира для описания кинематических пар букса/колёсная пара;
5. двенадцать биполярных силовых элементов (4 наклонных, 4 поперечных гасителя, 4 тяговых поводка);
6. восемь специальных силовых элементов типа Пружина для моделирования пружин подвески.
-
Создание нового объекта – рельсового экипажа.
Запуск программы UM Input и создание нового объекта.
-
Добавление колёсных пар.
Создание подсистемы с именем «Колёсная пара»;
Задание инерционных параметров колесной пары;
Масса – mwset = 3650 кг 2;
Момент инерции для осей X и Y ixwset = 1000 кг·м 2; iywset = 500 кг·м 2;
Добавление второй колёсной пары.
Положение колёсной пары, описывалось идентификаторами, по оси x‑ l1 и l2 по оси z‑rwheel. Значение идентификаторов в соответчики с вариантом l1=l2=3.7 rwheel= 0.525
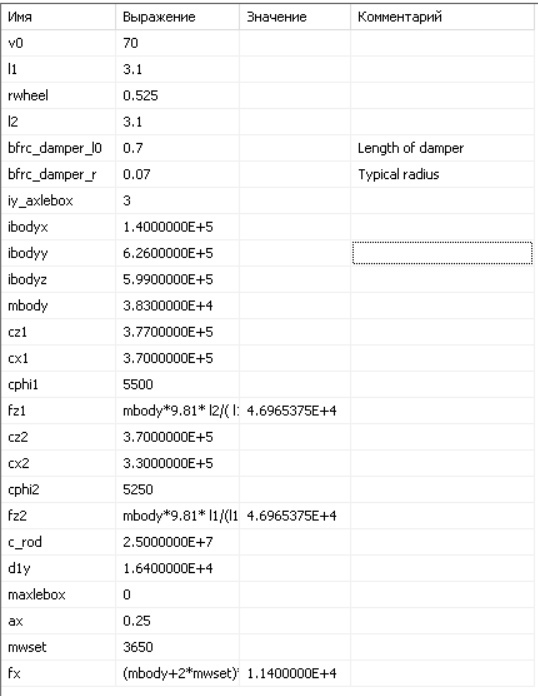
Рисунок 4 Список заданных идентификаторов
-
Создание графических образов.
Создание графического образа пружины;
Добавление заранее подготовленных графических образов:
-
AC4_CarBody (кузов); -
AC4_TractionRod_F (передний тяговый поводок); -
AC4_TractionRod_R (задний тяговый поводок); -
AC4_AxleBox LF (левая букса первой КП); -
AC4_AxleBox LR (левая букса второй КП); -
Damper (гаситель);
-
Графические образы правых букс; -
Графические образы левых букс путём поворота на 180 градусов вокруг вертикальной оси создать графические образы правых букс.
-
Добавление букс к модели автомотрисы
Сначала создаётся тело – букса, а потом вращательный шарнир связывающий базу колёсной пары и буксу.
Момент инерции буксы относительно оси вращения IY_AxleBox = 3 кг•м2
-
Добавление кузова к модели автомотрисы
Добавляем кузов автомотрисы как твёрдым телом и описываем его инерционные параметры.
-
mbody = 38300 кг; -
ibodyx = 140000 кг∙м2; -
ibodyy = 626000 кг∙м2; -
ibodyz = 599000 кг∙м2; -
zbody = 1.525 м.
Зададим шарнир, выбрав тип 6 степеней свободы. Шарниру автоматически назначено имя jCar body. Данный шарнир назначает телу шесть степеней свободы: три декартовы координаты относительно СК0 и три угла ориентации в последовательности 1, 2, 3 (последовательные повороты вокруг оси X, затем Y и, наконец, Z).
-
Добавление силовых элементов
Создание пружин в количестве 4-х штук специальными силами с заданными параметрами элемента типа пружина:
-
cz1 = 377000 Н/м; -
cx1 = 370000 Н/м; -
cphi1 = 5500 Нм/рад; -
fz1=mbody*9.81*l2/ (l1+ l2)/4.
Создание продольных тяговых поводков в количестве 4-х штук с помощью биполярных силовых элементов.
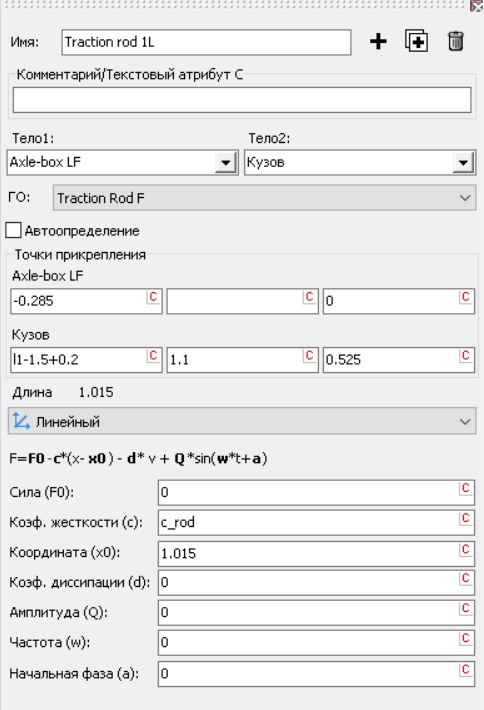
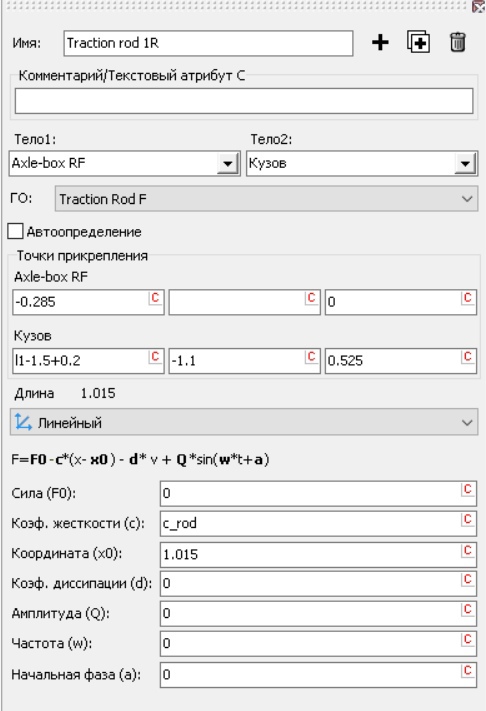
Рисунок 5 Параметры тяговых поводков
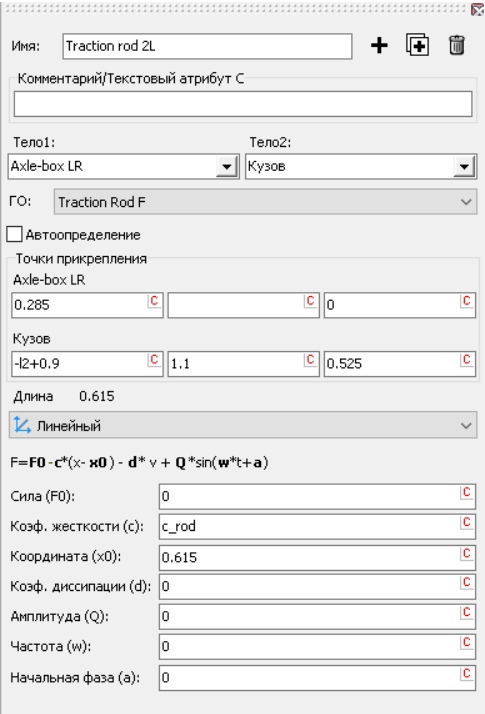
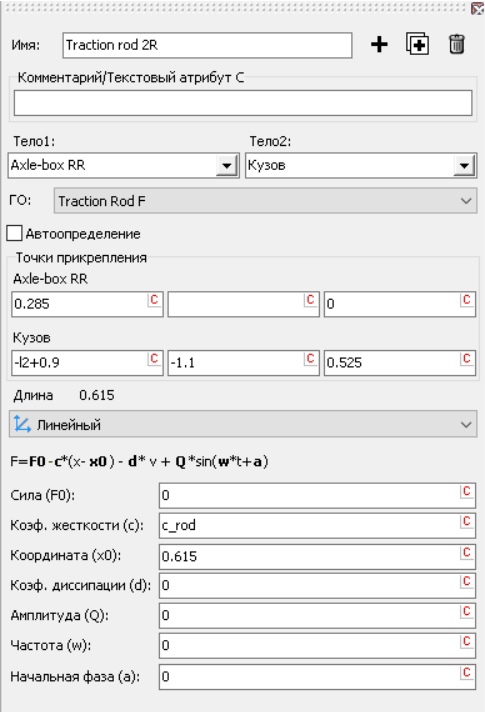
Рисунок 6 Координаты тяговых поводков
Создание гасителей колебаний, добавлением биполярных элементов, переименовав их в
DamperY1L; DamperY1R; DamperY2L; DamperY2R. Связывающие буксы и кузов автомотрисы.
Первый гаситель DamperY1L, в качестве первое тело Axle-box LF, координаты точек прикрепления (0, 0.32, 0) и (l1, 1.7, 0.525)
Второй гаситель DamperY1R, в качестве первое тело Axle-box RF, координаты точек прикрепления (0, -0.32, 0) и (l1, -1.7, 0.525)
Третий гаситель DamperY2L, в качестве первое тело Axle-box LR, координаты точек прикрепления (0, 0.32, 0) и (-l2, 1.7, 0.525)
Четвёртый гаситель DamperY2R, в качестве первое тело Axle-box RR, координаты точек прикрепления (0, -0.32, 0) и (-l2, -1.7, 0.525).
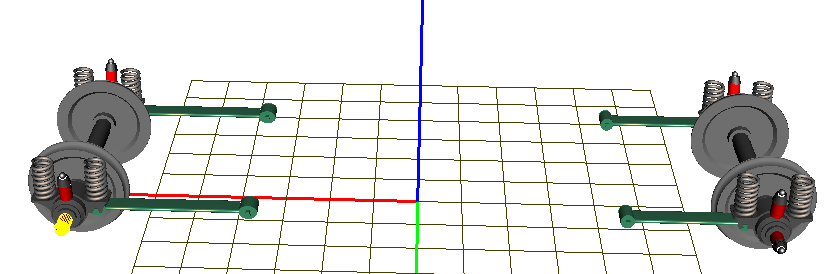
Рисунок 7 Расположение гасителей колебаний
-
Проектирование движения созданной автомотрисы АС4
Проверка положения равновесия и движения созданной автомотрисы со скоростью 70 м/с по кривой траектории.
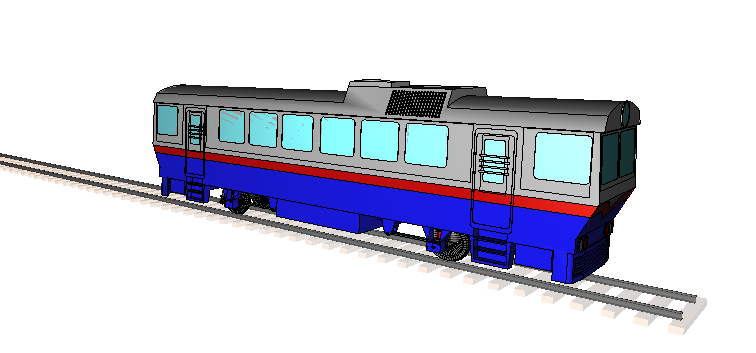
Рисунок 8 Движение автомотрисы
-
Результат моделирования.
По результатам процесса интегрирования ошибок не выявлено, сход с рельс не обнаружен, модель автомотрисы готова.
Вывод
Создана модель колёсной пары и промоделировал её по идеально ровному пути. Созданная модель автомотрисы АС4 и успешно промоделирована по кривой траектории со скоростью равной 70 м/с. Разработанная модель может использоваться для оценки собственных частот колебаний кузова на рессорном подвешивании и поиска критической скорости.