Файл: Контрольная работа по дисциплине Теория автоматического управления Вариант 2 фио.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 01.12.2023
Просмотров: 42
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕЛЕКОММУНИКАЦИЙ им. проф. М.А. Бонч-Бруевича
(СПБГУТ)

«ИНСТИТУТ НЕПРЕРЫВНОГО ОБРАЗОВАНИЯ (ИНО)»
Контрольная работа по дисциплине
«Теория автоматического управления»
Вариант 2
ФИО: Юлдашбаев Мухаммад Нуритдин угли
Факультет: ИНО
Курс: 3
Группа: ПБ-92з
Студенческий билет: 1910522
Теория автоматического управления
Контрольная работа
Вариант 2
Вопрос: Система автоматической стабилизации.
Задание: Для колебательного звена второго порядка записать дифференциальное уравнение и уравнение передаточной функции.
Записать уравнение переходной функции и построить график переходной характеристики. Определить коэффициент относительного затухания
 ,
,частоту колебаний
 и их период
и их период  .
.Записать уравнение амплитудно-частотной и фазочастотной функций, рассчитать их и построить логарифмическое характеристики.
Параметры звена (Вариант 2)
| T1 | T2 | K |
| 0.3 | 0.07 | 20 |
Дифференциальное уравнение второго порядка описывается формулой:
 ,
,где x – входная величина, y – выходная величина
Откуда:
Уравнение передаточной функции колебательного звена:
 ,
,где p – символ дифференцирования.
Коэффициент относительного затухания:
Частота колебаний:

Период колебаний:

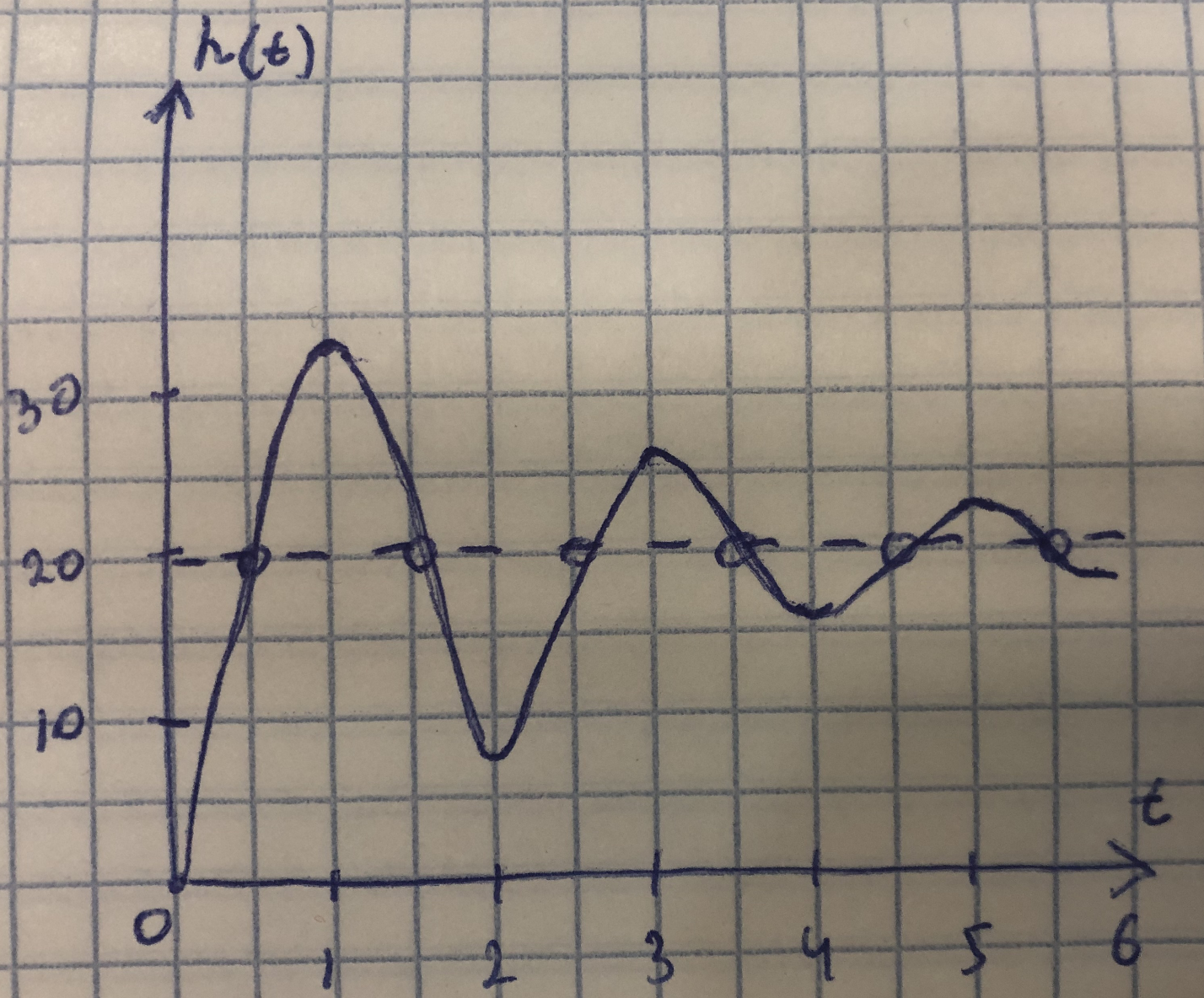
Переходная функция колебательного звена имеет вид:

где

с использованием величины коэффициента относительного затухания:

При всех известных:


Значение времени t, соответствующее h(t)= K, обнуляется при:

Откуда
 с.
с.Величина h(t)для моментов временистоящих друг от друга на четверть периода
 с.
с.При t = 0:

При t = 0,56 + 0,5 = 1,06 c.

При t = 1,06 + 0,5 = 1,56 c.

При t = 1,56 + 0,5 = 2,06 c.

При t = 2,06 + 0,5 = 2,56 c.

При t = 2,56 + 0,5 = 3,06 c.

При t = 4,06 c.


При t = 5,06 c.

При t = 6,06 c.

График переходной характеристики
Амплитудная частотная характеристика описывается формулой:
При:
 :
:
При:
 = 3.3с:
= 3.3с:
При:
 :
:
При:
 :
:
При:
 = 16.6с:
= 16.6с:
Логарифмическая частотная характеристика:
Lg
 – абсцисса
– абсцисса20lgA(
 ) – ордината
) – ордината20lg20 = 26 дБ
20lg14.2 = 23 дБ
20lg13 = 22.2 дБ
20lg10.7 = 20.6 дБ
20lg9 = 19 дБ
20lg6.7 = 16.5 дБ
Для уравнений
 уравнение фазочастотной характеристики имеет вид:
уравнение фазочастотной характеристики имеет вид:
При:
 :
: 
При:
 1.6с:
1.6с: 
При:
3.3с: 
Для уравнений
 уравнение фазочастотной характеристики имеет вид:
уравнение фазочастотной характеристики имеет вид:
При:
6.6с: 
При:
 10с:
10с: 
При:
 :
: 
Ответ на вопрос:
Системы автоматической стабилизации характеризуются тем, что в процессе работы системы управляющее воздействие остаётся величиной постоянной. Основной задачей системы автоматической стабилизации является поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений. Действующие возмущения вызывают отклонение регулируемой величины от предписанного ей значения. Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и её значением, принятым за начало отсчёта. Понятие отклонения регулируемой величины является характерным для систем автоматической стабилизации и позволяет дать качественную оценку динамическим свойствам систем этого класса.
Системами автоматической стабилизации являются различного рода САР (системы автоматического регулирования), предназначенные для регулирования скорости, напряжения, температуры, давления; например, стабилизатор курса самолёта и т.д. Система автоматического регулирования представляет собой комплекс, состоящий из регулируемого объекта и регулятора. Регулятор включает в себя такие основные элементы, как элемент сравнения, усилитель, исполнительный элемент и корректирующие устройства.
Системы автоматического управления классифицируются по различным признакам:
По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы.
По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые.
По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными
, дискретными и дискретно-непрерывными системами.
Зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
По виду контролируемых изменений своих свойств различают не приспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
Системы автоматической стабилизации характеризуются тем, что в процессе работы системы управляющее воздействие остаётся величиной постоянной.