Файл: Федеральное государственное автономное образовательное учреждение высшего образования Национальный исследовательский технологический университет мисиС.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 136
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1. Формы контроля и виды оценочных средств
2. Результаты освоения компетенций и распределение контрольных мероприятий
3. Оценочные средства по контрольным работам
3.1 Условия проведения контрольных работ
3.2 Теоретические вопросы и практические задания контрольных работ (УК-8.1-З1,У1; УК-10.3-З1,У1)
3.3 Критерии оценки контрольных работ
4.1 Условия сдачи домашнего задания/контрольной работы
4.2 Критерии оценки домашнего задания/контрольной работы
5. Оценочные средства промежуточной аттестации
, охватывающие все разделы УД, или в тестовой форме по тестовым заданиям в среде LMS Canvas.
Тесты для проведения экзамена генерируются системой LMS Canvas из банка тестовых вопросов и заданий.
Тест для зачета состоит из 42 теоретических вопросов (1 балл за правильный ответ). Время прохождения теста ограничено – 45 минут.
Экзаменационный тест состоит из 35 теоретических вопросов (1 балл за правильный ответ). Время прохождения теста ограничено – 45 минут.
Теоретические вопросы билетов для зачета:
Практические задания билетов для зачета (3 семестр):
Теоретические вопросы экзаменационных билетов:
1 Введение в динамику. Сила. Масса.
2 Инерциальные системы отсчета. Законы Ньютона.
3 Дифференциальное уравнение движения. Задачи динамики. Движение в НСО.
4 Теоремы об изменении количества движения материальной точки и системы материальных точек.
5 Момент количества движения материальной точки и системы материальных точек и осей.
6 Теорема об изменении момента количества движения материальной точки и системы материальных точек.
7 Теорема об изменении кинетической энергии.
8 Момент инерции. Момент количества движения и вращательная кинетическая энергия твердого тела с закрепленной осью.
9 Постановка задачи о движении несвободной материальной точки, систем материальных точек.
10 Связи. Классификация связей.
11 Действительные, возможные и виртуальные перемещения. Уравнение Лагранжа 1го рода.
12 Принцип возможных перемещений.
13 Обобщенные координаты. Обобщенные силы.
14 Движение в неинерциальных системах отсчета.
15 Принцип Даламбера и Даламбера-Лагранжа.
16 Уравнение Лагранжа 2го рода
17 Свободные колебания
42 Затухающие колебания
43 Вынужденные колебания
Практические задания экзаменационных билетов (общие формулировки) (4 семестр):
Тестовые вопросы (3 семестр):
Тестовые вопросы (4 семестр):
Тесты для проведения экзамена генерируются системой LMS Canvas из банка тестовых вопросов и заданий.
Тест для зачета состоит из 42 теоретических вопросов (1 балл за правильный ответ). Время прохождения теста ограничено – 45 минут.
Экзаменационный тест состоит из 35 теоретических вопросов (1 балл за правильный ответ). Время прохождения теста ограничено – 45 минут.
5.2 Теоретические вопросы и практические задания билетов для проведения зачета в устной форме (3 семестр) (УК-8.1-З1,У1,В1; УК-10.3-З1,У1,В1)
Теоретические вопросы билетов для зачета:
-
Введение в статику. Сила. Система сил. Равновесие абсолютно твердого тела -
Аксиомы статики. -
Активные силы и реакции связей. Простейшие случаи связей. -
Основные задачи статики. -
Приведение системы сходящихся сил к равнодействующей. Условия равновесия системы сходящихся сил. -
Сложение двух параллельных и анти параллельных сил. -
Момент силы и системы сил относительно точки. -
Момент силы и системы сил относительно оси. -
Момент пары сил. -
Свойства пар. Равновесие системы пар. -
Параллельный перенос сил. -
Основные теоремы статики. -
Пространственная система сил. Условия равновесия. -
Плоская система сил. Условия равновесия. -
Введение в кинематику. Объекты кинематики. -
Равновесие при наличии трения скольжения -
Равновесие при наличии трения качения -
Векторный способ задания движения. Траектория, скорость, ускорение. -
Задание движения методом декартовых координат. Траектория, скорость, ускорение. -
Естественный способ задания движения. Скорость. Касательное и нормальное ускорение. -
Поступательное движение твердого тела. -
Вращение твердого тела вокруг закрепленной оси. Угловая скорость. Угловое ускорение. -
Плоско-параллельное движение тела. Скорость. Мгновенный центр скоростей. Ускорение. -
Сложное движение точки. Законы сложения скорости и ускорений. -
Введение в динамику. Сила. Масса. -
Инерциальные системы отсчета. Законы Ньютона. -
Дифференциальное уравнение движения. Задачи динамики. -
Теоремы об изменении количества движения материальной точки и системы материальных точек. -
Момент количества движения материальной точки и системы материальных точек и осей. -
Теорема об изменении момента количества движения материальной точки и системы материальных точек. -
Теорема об изменении кинетической энергии. -
Момент инерции. Момент количества движения и вращательная кинетическая энергия твердого тела с закрепленной осью. -
Постановка задачи о движении несвободной материальной точки, систем материальных точек. -
Связи. Классификация связей. -
Действительные, возможные и виртуальные перемещения. Уравнение Лагранжа 1го рода. -
Принцип возможных перемещений. -
Обобщенные координаты. Обобщенные силы. -
Движение в неинерциальных системах отсчета. -
Принцип Даламбера и Даламбера-Лагранжа. -
Уравнение Лагранжа 2го рода -
Свободные колебания -
Затухающие колебания -
Вынужденные колебания
Практические задания билетов для зачета (3 семестр):
-
Определение реакций опор твердого тела (плоская система сил) -
Определение реакций опор твердого тела (пространственная система сил) -
Динамика материальной точки. -
Применение теоремы об изменении кинетического момента к определению угловой скорости твердого тела. -
Применение теоремы об изменении кинетической энергии к исследованию движения механической системы. -
Применение принципа Даламбера к определению реакций связей. -
Применение к исследованию движения механической системы с одной степенью свободы уравнений Лагранжа 2-го рода.
5.3 Теоретические вопросы и практические задания билетов для проведения экзамена в письменной форме (4 семестр) (УК-8.1-З1,У1,В1; УК-10.3-З1,У1,В1)
Теоретические вопросы экзаменационных билетов:
1 Введение в динамику. Сила. Масса.
2 Инерциальные системы отсчета. Законы Ньютона.
3 Дифференциальное уравнение движения. Задачи динамики. Движение в НСО.
4 Теоремы об изменении количества движения материальной точки и системы материальных точек.
5 Момент количества движения материальной точки и системы материальных точек и осей.
6 Теорема об изменении момента количества движения материальной точки и системы материальных точек.
7 Теорема об изменении кинетической энергии.
8 Момент инерции. Момент количества движения и вращательная кинетическая энергия твердого тела с закрепленной осью.
9 Постановка задачи о движении несвободной материальной точки, систем материальных точек.
10 Связи. Классификация связей.
11 Действительные, возможные и виртуальные перемещения. Уравнение Лагранжа 1го рода.
12 Принцип возможных перемещений.
13 Обобщенные координаты. Обобщенные силы.
14 Движение в неинерциальных системах отсчета.
15 Принцип Даламбера и Даламбера-Лагранжа.
16 Уравнение Лагранжа 2го рода
17 Свободные колебания
42 Затухающие колебания
43 Вынужденные колебания
Практические задания экзаменационных билетов (общие формулировки) (4 семестр):
-
Динамика материальной точки. -
Применение теоремы об изменении кинетического момента к определению угловой скорости твердого тела. -
Применение теоремы об изменении кинетической энергии к исследованию движения механической системы. -
Применение принципа Даламбера к определению реакций связей. -
Применение к исследованию движения механической системы с одной степенью свободы уравнений Лагранжа 2-го рода.
5.4 Тестовые вопросы и задания для проведения этапов промежуточной аттестации в форме компьютерного тестирования (УК-8.1-З1,У1,В1; УК-10.3-З1,У1,В1)
Тестовые вопросы (3 семестр):
-
Статика – это раздел теоретической механики, который изучает:-
механическое движение материальных твердых тел и их взаимодействие. -
условия равновесия тел под действием сил. -
движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются. -
движение тел под действием сил.
-
-
Сила – это:-
векторная величина, характеризующая механическое взаимодействие тел между собой. -
скалярная величина, характеризующая механическое взаимодействие тел между собой. -
векторная величина, характеризующая динамическое взаимодействие тел между собой. -
скалярная величина, характеризующая динамическое взаимодействие тел между собой.
-
-
Единицей измерения силы является:-
1 Дж -
1 Па -
1 Н -
1 кг
-
-
ЛДС силы – это:-
прямая, перпендикулярно которой расположена сила -
прямая, на которой лежит сила -
луч, на котором лежит сила -
луч, указывающий направление движения силы
-
-
Абсолютно твёрдое тело – это:-
физическое тело, размерами которого можно пренебречь, по сравнению с расстоянием на котором оно находится -
условно принятое тело, размерами которого можно пренебречь, по сравнению с расстоянием на котором оно находится -
физическое тело, которое не подвержено деформации -
условно принятое тело, которое не подвержено деформации
-
-
Материальная точка - это:-
физическое тело, размерами которого можно пренебречь, по сравнению с расстоянием на котором оно находится -
условно принятое тело, размерами которого можно пренебречь, по сравнению с расстоянием на котором оно находится -
физическое тело, которое не подвержено деформации -
условно принятое тело, которое не подвержено деформации
-
-
Равнодействующая сила – это:-
такая сила, которое оказывает на тело такое же действие, как и все силы воздействующие на тело вместе взятые. -
такая сила, которое оказывает на тело такое же действие, как и каждая из сил воздействующих на тело. -
такая система сил, которое оказывает на тело такое же действие, как и все силы воздействующие на тело вместе взятые. -
такая система сил, которое оказывает на тело такое же действие, как и каждая из сил воздействующих на тело.
-
-
Уравновешивающая сила равна:-
по величине равнодействующей силе, но лежит на другой ЛДС. -
по величине равнодействующей силе, лежит на другой ЛДС, но направлена в противоположную сторону. -
по величине равнодействующей силе, лежит с ней на одной ЛДС, но направлена в противоположную сторону. -
по величине и направлению равнодействующей силе, лежит с ней на одной ЛДС.
-
-
По формуле определяют:
определяют:-
величину уравновешивающей силы, от двух сил действующих на одно тело. -
величину равнодействующей силы, от двух сил действующих на два разных тела. -
величину уравновешивающей силы, от двух сил действующих из одной точки на одно тело. -
величину равнодействующей силы, от двух сил действующих из одной точки на одно тело.
-
-
Тела, ограничивающие перемещение других тел, называют:-
реакциями -
опорами -
связями -
поверхностями
-
-
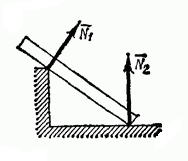
На рисунке представлен данный вид связи: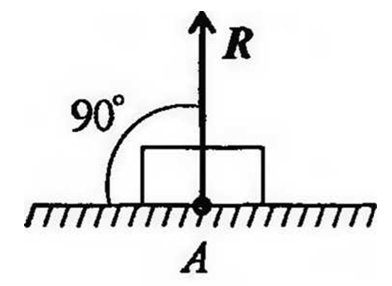
-
в виде шероховатой поверхности -
в виде гибкой связи -
в виде гладкойповерхности -
в виде жесткой связи
-
-
При условии, что F1 = - ׀F4׀ , F2 = - ׀F5׀ , F3 ≠ - ׀F5׀ , эти силы системы можно убрать, не нарушая механического состояния тела: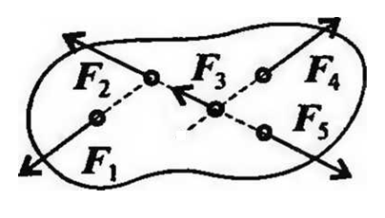
-
F1 и F3 -
F2 и F5 -
F1 иF4 -
F3 и F5
-
-
Плоской системой сходящихся сил называется:-
система сил, действующих на одно тело, ЛДС которых имеют одну общую точку. -
система сил, действующих на разные тела, ЛДС которых имеют одну общую точку. -
система сил, действующих на разные тела, ЛДС которых не имеют общих точек. -
система сил, действующих на одно тело, ЛДС которых не имеют общих точек.
-
-
Определение равнодействующей в плоской системе сходящихся сил графическим способом заключается в построении:-
силового многоугольника -
силового неравенства -
проекций всех сил на оси координат Х и У -
круговорота внутренних и внешних сил
-
-
Выражение для расчета проекции силы F на ось Оу для рисунка: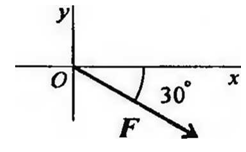
Fу= - F*соs 30°
Fу= F*соs 60°
Fу= - F*sin 30°
Fу= - F*sin 60°
-
Пара сил оказывает на тело:-
отрицательное действие -
положительное действие -
вращающее действие -
изгибающее действие
-
-
Моментом силы относительно точки называется:-
произведение всех сил системы -
произведение силы на плечо -
отношение силы к расстоянию до точки -
отношение расстояния до точки к величине силы
-
-
Единицей измерения момента является:-
1Н/м -
1Н*м -
1Па -
1Н
-
-
Определите для рисунка, чему будет равен момент пары сил:
-
12 Нм -
7 Нм -
– 12 Нм -
– 7 Нм
-
-
Единицей измерения сосредоточенной силы является:-
Н -
Нм -
Н/м -
Па
-
-
Единицей измерения распределённой силы является:-
Н -
Нм -
Н/м -
Па
-
-
Опора допускает поворот вокруг шарнира и перемещение вдоль опорной поверхности. Реакция направлена перпендикулярно опорной поверхности:-
шарнирная опора -
шарнирно-подвижная опора -
шарнирно-неподвижная опора -
защемление
-
-
Опора допускает поворот вокруг шарнира и может быть заменена двумя составляющими силы вдоль осей координат:-
шарнирная опора -
шарнирно-подвижная опора -
шарнирно-неподвижная опора -
защемление
-
-
Опора не допускает поворот вокруг шарнира и может быть заменена двумя составляющими силы вдоль осей координат:-
шарнирная опора -
шарнирно-подвижная опора -
шарнирно-неподвижная опора -
защемление
-
-
Пространственная система сил — это:-
система сил, линии действия которых лежат в одной плоскости. -
система сил, линии действия которых не лежат в одной плоскости. -
система сил, линии действия которых перпендикулярны плоскости. -
система сил, линии действия которых параллельны плоскости.
-
-
Центр тяжести параллелепипеда находится:-
на одной из граней фигуры -
на середине низовой грани фигуры -
на пересечении диагоналей фигуры -
на середине перпендикуляра, опущенного из середины верхней грани фигуры
-
-
Центр тяжести конуса находится:-
на одной из граней фигуры -
на середине низовой грани фигуры -
на 1/3 высоты от основания фигуры -
на середине перпендикуляра, опущенного из середины верхней грани фигуры
-
-
Реакции опор Ra и Rв в данной балке: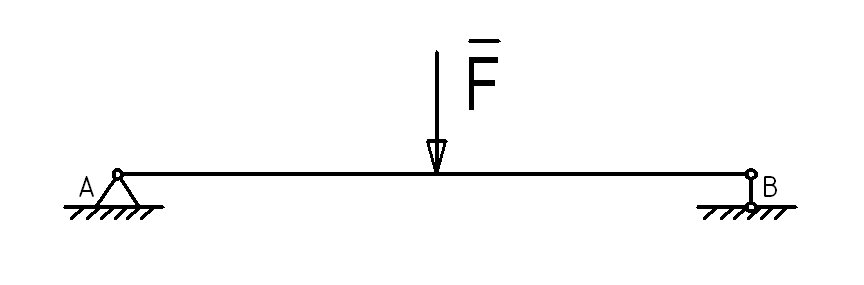
-
численно равны и равны по модулю -
численно равны, но не равны по модулю -
Ra Rв d 2 раза -
Ra в d 2 раза
-
-
Кинематика – это раздел теоретической механики, который изучает:-
механическое движение материальных твердых тел и их взаимодействие. -
условия равновесия тел под действием сил. -
движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются. -
движение тел под действием сил.
-
-
Динамика – это раздел теоретической механики, который изучает:-
механическое движение материальных твердых тел и их взаимодействие. -
условия равновесия тел под действием сил. -
движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются. -
движение тел под действием сил.
-
-
Статика – это раздел теоретической механики, который изучает:-
общие законы равновесия материальных точек и твердых тел и их взаимодействие. -
условия равновесия тел под действием внутренних сил. -
равновесие тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются. -
движение тел под действием сил.
-
-
Сила – это:-
векторная величина, характеризующая механическое взаимодействие тел между собой. -
векторная величина, характеризующая механическое взаимодействие сил между собой. -
векторная величина, характеризующая динамическое взаимодействие сил между собой. -
скалярная величина, характеризующая динамическое взаимодействие сил между собой.
-
-
Система сил– это:-
Совокупность всех векторных величин, действующих на одно тело. -
Совокупность всех скалярных величин, действующих на соседние тела. -
Совокупность всех векторных величин, действующих на соседние тела. -
Совокупность всех скалярных величин, действующих на одно тело.
-
-
F Σ – это обозначение:-
внешней силы, воздействующей на тело. -
проекции силы на ось координат. -
уравновешивающей силы. -
равнодействующей силы.
-
-
Величину равнодействующей силы, от двух сил действующих из одной точки на одно тело определяют по формуле:-

-
 *****
***** -

-

-
-
Связь – это:-
тело, движению которого ничего не препятствует. -
опора, которая препятствует движению других тел. -
тело, которое препятствует движению других тел. -
поверхность, которая препятствует движению других тел.
-
-
На рисунке представлен данный вид связи:
 |
|
-
При условии, что F1 = - ׀F2׀ , F3 = - ׀F5׀ , F4 ≠ - ׀F2׀ , эти силы системы можно убрать, не нарушая механического состояния тела: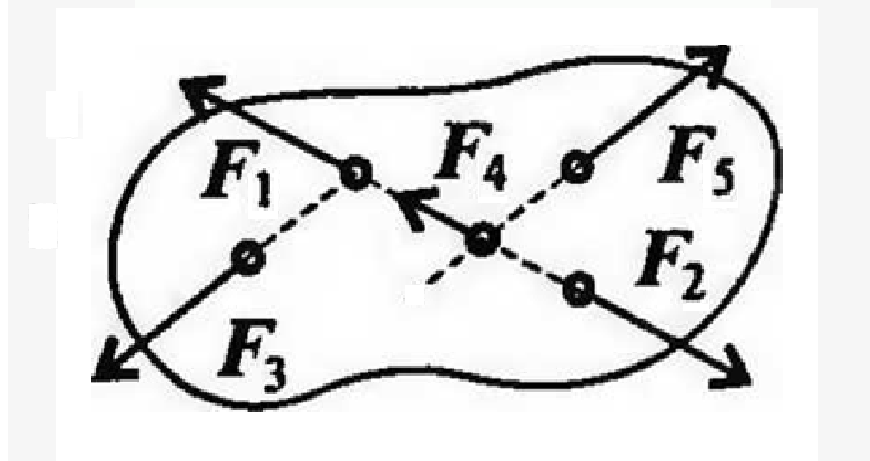
-
F1 и F3 -
F2 и F4 -
F1 иF2 -
F3 и F5
-
-
Если определённая равнодействующая сила при графическом сложении векторов в плоской системе сходящихся сил, оказалась равна нулю, то это будет означать:-
что данное тело не испытывает нагрузок. -
что данное тело не движется. -
что данное тело движется по линии действия уравновешивающей силы. -
что данное тело не испытывает излишней нагрузки.
-
-
Выражение для расчета проекции силы F на ось Ох для рисунка:
-
Fх= - F*соs 30° -
Fх= F*соs 60° -
Fх= - F*sin 30° -
Fх= F*sin 60°
-
-
Определите для рисунка, чему будет равен момент пары сил: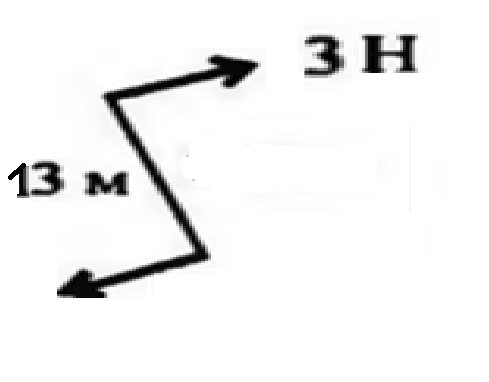
-
39 Нм -
16 Нм -
–39 Нм -
– 16 Нм
-
-
Центр тяжести у ромба находится:-
на пересечении медиан фигуры -
на пересечении диагоналей фигуры -
на середине перпендикуляра, опущенного из середины верхней грани фигуры -
на расстоянии 1/3 от левого угла фигуры
-
Тестовые вопросы (4 семестр):
-
Второй закон Ньютона (второй закон динамики) устанавливает зависимость между
-
Силой притяжения между телами и их массой -
силой взаимодействия между телами и расстоянием между ними -
силой и сообщаемым ею материальной точке ускорением -
продольной силой и относительным удлинением (укорочением) бруса
-
Третий закон Ньютона (третий закон динамики) формулируется так:
-
ускорение материальной точки пропорционально приложенной силе -
причиной изменения состояния материальной точки является сила -
силы взаимодействия двух материальных точек равны по модулю и направлены противоположно -
сила есть вектор, равный произведению массы материальной точки на ее ускорение
-
Первый закон Ньютона (первый закон динамики) формулируется так: (выбрать правильный ответ)
-
действие равно противодействию -
ускорение материальной точки прямо пропорционально модулю силы, вызывающей это ускорение -
все тела под действием притяжения Земли падают с одинаковым ускорением -
изолированная материальная точка находится в состоянии покоя или движется прямолинейно и равномерно
-
Максимальная дальность полета материальной точки, брошенной под углом α к горизонту (без учета силы сопротивления воздуха) имеет место при
-
α = π/4 -
α = 2π/3 -
α = π/2 -
α = π/3
-
Траектория материальной точки, брошенной под углом к горизонту, представляет собой:
-
параболу с горизонтальной осью симметрии -
параболу с вертикальной осью симметрии -
гиперболу с вертикальной осью симметрии -
усеченный эллипс
-
Изолированная материальная точка это
-
бесконечно малый участок, не проводящий электрический ток -
точка, на которую не действуют другие -
материальные точки материальная точка, находящаяся в замкнутом пространстве -
точечный заряд, окруженный изолирующей материей
-
Какое время понадобится камню массой 300 грамм для падения с башни высотой 20 м, если камень массой 450 грамм упал с этой башни за 2 секунды? (сопротивлением воздуха пренебречь)
-
4,5 секунды -
6 секунд -
2 секунды -
3 секунды
-
Укажите на правильное определение работы силы: