ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.12.2023
Просмотров: 53
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Пневматика позволяет использовать сжатый воздух для получения силы, необходимой для выполнения работы. Ключевые элементы пневмоавтоматики – это регулятор и исполнительный механизм. Первый отвечает за преобразование сжатого воздуха в силу, а второй – за настройку значения давления при распределении сжатого воздуха.
Пневмоавтоматика- это область технической кибернетики, которая охватывает принципы и средства построение приборов, составляющих и систем автоматического контроля и управления, использующих разнообразные эфекты газовой динамики.
Пневмоавтома́тика — автоматика, использующая сжатый газ, чаще воздух, в качестве рабочей среды, а также техническая дисциплина, занимающаяся подобной автоматикой.
Особенностью работы пневмоавтоматики является низкое, до 10 Гц, быстродействие. По этой причине её применение ограничено медленно текущими процессами. Однако сравнительная простота и надёжность обеспечивали её успешное применение в большом количестве систем управления технологическими процессами в химической, нефтеперерабатывающей промышленности, на нефте-, газо- и угледобывающих предприятиях.
Государственное значение совершенствования пневмоавтоматики в СССР иллюстрирует факт присуждения Ленинской премии 1964 года в области техники за создание и внедрение унифицированной системы элементов промышленной пневмоавтоматики (УСЭППА).
Развитие пневмоавтоматики, активно продолжавшееся до начала 1990-х годов, привело к созданию широкой гаммы устройств, выполняющих такие функции, как, например, сбор информации (датчики с пневматическим выходом, пневматические выключатели и др.), преобразование и хранение информации (пневматические регуляторы, оптимизаторы, вычислительные аналоговые устройства, релейные системы), представление информации (регистрирующие устройства, индикаторы), осуществление управляющего воздействия (пневматические исполнительные устройства).
В настоящее время, в связи с доступностью и, как следствие, широчайшей компьютезиризацией любых процессов, использование пневмоавтоматики существенно сузилось. Стали экзотикой, перекочевав в политехнические музуи, устройства вроде пневматической вычислительной машины, хотя разработки всё ещё встречаются. Пневмоавтоматика продолжает успешно использоваться на пожароопасных газодобывающих и газо-нефте перерабатывающих предприятиях. Особенно широкое распространение получили управляющие комплексы с комбинированным пневмо-электропитанием на нефтяных и газовых месторождениях в США, Канаде и др. Это обусловлено возможностями использования для привода исполнительных механизмов природного газа из скважин и газопроводов. Теперь роль пневмоавтоматики преимущественно ограничивается исполнительными механизмами (фиксаторы, толкатели, клапаны, дроссели) и отдельными видами простейшей автоматики, подобной плунжерному лифту в газодобыче или железнодорожному стоп-крану.
Элементы и системы пневмоавтоматики
Пневматические устройства промышленной автоматики собираются из элементов «Универсальной системы элементов промышленной пневмоавтоматики» (УСЭППА). Система УСЭППА состоит из набора унифицированных элементов дискретного и непрерывного действия, каждый из которых выполняет простейшую операцию. Питание приборов осуществляется очищенным от пыли, масла и влаги воздухом давлением 140 ± 14 кПа (1,4 ± 0,14 кгс/см2 ) от общего коллектора сети сжатого воздуха или через индивидуальный редуктор и фильтр от компрессора. Приборы рассчитаны на работы в пожаро- и взрывоопасных условиях эксплуатации (кроме приборов с электрическим выходным сигналом) и могут быть установлены в условиях агрессивных сред химических и других предприятий.
Большинство элементов предназначено для монтажа на платах, а также некоторые элементы монтируются на щитах. Связь между элементами, монтируемыми на платах, осуществляется каналами внутри платы или трубками из поливинилового пластика с внутренним диаметром 4 мм. Монтажные детали поставляются по спецификации заказа комплектно с элементами.
Элементы непрерывного действия
Пневматические сопротивления — это устройство, осуществляющее пневматическое сопротивление, называется дроссель, он предназначен для ограничения или изменения расхода протекающего через него воздуха, что обеспечивается созданием местного сопротивления на пневматических линиях.
Дроссели П2Д.1 - П2Д.4 Постоянный дроссель П2Д.4 представляет собой капилляр ОЛ; 0,3 или 0,5 мм (по спецификации заказа) длиной 20 мм.
Повторители давления
Повторители давления (усилители мощности) предназначены для усиления расхода воздуха на выходе по мощности и равного по величине входному давлению. Их применяют для уменьшения запаздывания сигналов в пневмокамерах большого объема в длинных пневмолиниях, а также для развязки пневматических цепей.
Повторитель П2П.1 Повторитель П2П.1 (рис. 8, а) состоит из двух секций, отделенных друг от друга гибкой мембраной, жесткий центр которой служит заслонкой выпускного сопла, имеющего выход в атмосферу. При изменении входного давления равновесие мембраны нарушается, и она устанавливается в новое положение равновесия, изменяя, соответственно, величину выходного давления.
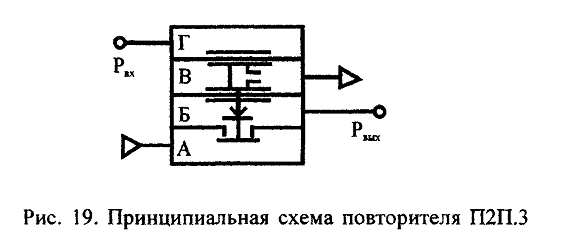
Повторитель с мощным выходом П2П.З Мощный повторитель давления П2П.З имеет 3 секции и состоит из связанных в мембранный блок двух мембран равной площади и клапана-дросселя, обеспечивающего сопроти-вление потокам воздуха из камеры А в камеру Б и из камеры Б в камеру В при помощи пневмоконтакта соплозаслонки. Воздух питания поступает в камеру А. Выходной сигнал Рвых формируется в камере Б. Входной сигнал Рвх подается в камеру Г и управляет клапаном-дросселем, изменяющим подачу воздуха питания из камеры А в камеру Б и в выходную линию. Поскольку площади мембран равны, давление Рвх и Рвых выравниваются. Возрастает только поток воздуха на выходе повторителя по сравнению с потоком на входе, что обусловлено большими отверстиями.
При возрастании Рвх блок мембран опускается, усиливается поток воздуха из камеры А через клапан в камеру Б, повышается Рвых. При уменьшении Рвх мембранный блок, поднимаясь, закрывает клапан и прекращает поступление воздуха из камеры А, но отводит заслонку от сопла, поэтому воздух из камеры Б через канал в штоке мембранного блока вытекает в камеру В и в атмосферу. При равновесии мембранный блок и заслонки клапана занимают такое положение, при котором приток воздуха из камеры А в камеру Б равен расходу воздуха из нее через камеру В в атмосферу и Рвых = Рвх. Коэффициент усиления по давлению этого повторителя может изменяться в интервале 0,95 -5-1,05, то есть его
основная погрешность равна+-6%.
Задатчик маломощны и П23Д.З
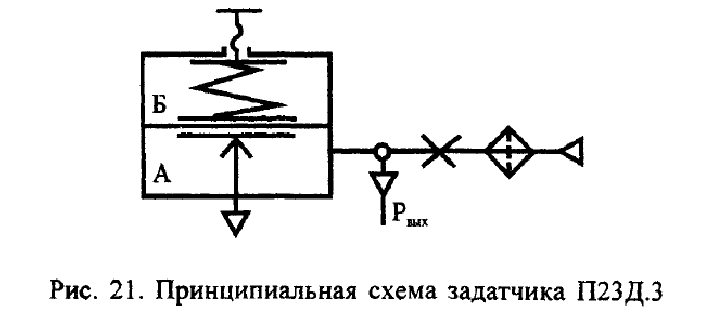
Задатчик П23Д.З предназначен для создания стабильногодавления сжатого воздуха, подаваемого обычно в глухие камеры приборов пневмоавтоматики.
Задатчик состоит из двух секций, отделенных друг от друга гибкой мембраной, жесткий центр которой служит заслонкой выпускного сопла, имеющего выход в атмосферу. Давление питания подается на штуцер 1 через постоянный дроссель Д с капилляром диаметром 0,3 мм. Установка задания производится с помощью настроечного винта, при вращении которого изменяется натяжение пружины. Мембрана устанавливается в положение равновесия при выходном давлении, пропорциональном силе сжатия пружины. Рабочий диапазон выходного давления 20-г-100 кПа (0,2-1кгс/см2).
Пневматические приводы технологического оборудования
Под совпадающими шагами понимается такие шаги, уравнения для описания которых имеют одинаковые или эквивалентные правые части. Это означает, что отличающиеся друг от друга шаги (совпадающие) начинают выполняться при возникновении одной и той же комбинации сигналов от путевых выключателей.
Для иллюстрации проблемы совпадающих шагов рассмотрим пневмопривод сверлильного полуавтомата (рис. 8.14).
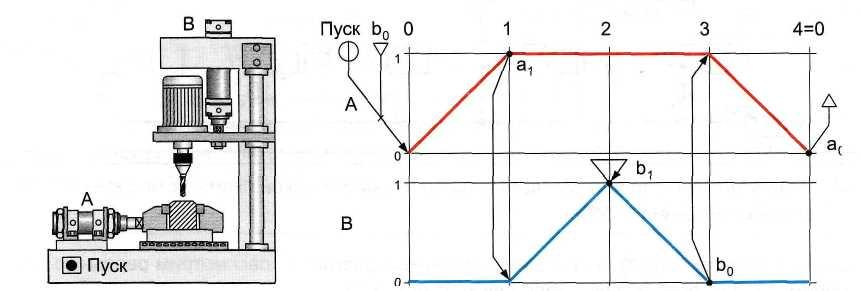
Рис. 8.14. Сверлильный полуавтомат и его диаграмма «перемещение — шаг»
П
Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения)
Д + = Пуск-ао-6о;

Заметим, что правые части 2-го и 4-го уравнений одинаковы, значит, при появлении комбинации сигналов а1 ■ Ьо выдвижение штока цилиндра В и втягивание штока цилиндра А будут происходить одновременно. Но функционирование системы подобным образом недопустимо, поскольку при этом не обеспечивается требуемый порядок выполнения рабочих операций.
Избежать одновременного выполнения 2-го и 4-го шагов можно путем формального изменения совпадающих правых частей соответствующих уравнений. С этой целью в них вводят дополнительные сигналы Х1 и Хг, в результате чего эти уравнения запишутся следующим образом:
е + = аг-Ь0-Х,; А- = а1Ь0-Х2.
Два дополнительных сигнала Х1 и Х2 можно реализовать путем применения пневматического триггера, выполнение функций которого обеспечивается, к примеру, бистабильным 4/2-распределителем с пневматическим управлением. Если триггер включен, то на его выход подается сигнал Xv если выключен — сигнал Х2.
Таким образом, для решения проблемы совпадающих шагов полученную систему логических уравнений необходимо дополнить уравнениями, описывающими функционирование триггера, а именно: чтобы сигнал Х1 появился перед началом 2-го шага, необходимо включать триггер (7+) перед выполнением как минимум предыдущего шага; отключать же его (7-) следует после выполнения 2-го шага. Другими словами, триггер необхо-
Полуавтомат — машина (или агрегат), самостоятельно выполняющая полный рабочий цикл и требующая вмешательства извне лишь для повторения цикла. Станок-полуавтомат отрабатывает весь цикл обработки заготовки и возвращает механизмы станка в исходное положение самостоятельно, тогда как установку заготовки и снятие обработанной детали производит оператор.
Пневматические приводы широко применяются в таких областях, как пищевая и химическая промышленность, транспорт и электроника, станки для текстильной и деревообрабатывающей промышленности, строительство, полиграфия, медицинская техника. Наиболее распространённым является пневматический привод с управлением от программируемого логического контроллера (ПЛК) или программируемого реле. Такая структура привода имеет в сегодняшнем промышленном мире широкое распространение в силу ряда причин: