ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 179
Скачиваний: 0
СОДЕРЖАНИЕ
Обработка результатов измерений
Изучение законов кинематики прямолинейного равнопеременного движения
Обработка результатов измерений
Обработка результатов измерений
Изучение основного закона динамики вращательного движения
Натяжение нити т можно определить по уравнению движения груза:
Упражнение 1. Проверка второго закона Ньютона для вращательного движения.
Умножим векторно обе части этого уравнения на вектор и заменим ускорениечерез угловое ускорениеисходя из формулы:
![]() .
.
Раскроем двойное векторное произведение и, учитывая выражение (1), получим:
![]() ,
,
где Мi – момент всех внешних сил, действующих на точку Оi.
Так как
ri,
то
![]() =0,
поэтому:
=0,
поэтому:
![]() .
.
Так как твердое тело можно представить как систему материальных точек, то для него необходимо просуммировать все равенства, записанные для всех точек:
![]() или
или
![]() .
.
С учетом выражения (2) перепишем это уравнение в виде:
![]() ,
,
где I– момент инерции тела относительно осиО,![]() –
результирующий момент внешних сил
относительно осиО.
–
результирующий момент внешних сил
относительно осиО.
Таким образом:
![]() .
(5)
.
(5)
Уравнение (5) есть основной закон динамики вращательного движения твердого тела или второй закон Ньютона для вращательного движения.
Из второго закона Ньютона для вращательного движения (5) следует, что угловые ускорения тела с постоянным моментом инерцииIпрямо пропорциональны вращающим моментам сил:
![]()
![]() .
(6)
.
(6)
Если момент инерции тела меняется, например, из-за перераспределения массы тела по радиусу, при постоянном вращающем моменте сил, то угловые ускорения обратнопропорциональны моментам инерции тела:
![]() .
(7)
.
(7)
Одной из задач предлагаемой лабораторной работы является опытная проверка соотношений (6) и (7), выполнение которых является экспериментальной проверкой второго закона Ньютона для вращательного движения. Другой задачей работы является проверка применимости формулы момента инерции материальной точки для вычисления момента инерции тела, вращающегося по окружности с радиусом много больше размеров тела.
Описание установки
Установка включает в себя маятник Обербека, электронный блок, набор грузов. Общий вид установки изображен на рис.3.
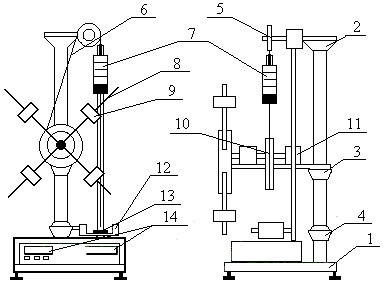
Рис.3
Установка состоит из основания 1, на вертикальной стойке которого размещены верхний2, средний3и нижний4кронштейны. На кронштейне2крепится блок5, через который перекинута нить6, на которой подвешены грузы7. На кронштейне3крепится электромагнит11, который с помощью фрикциона удерживает систему грузов в неподвижном состоянии. На том же кронштейне закреплен двухступенчатый шкив10к оси которого крепится крестовина8, представляющая собой четыре стержня с нанесенными на них рисками через 1см. На каждом стержне могут свободно передвигаться и фиксироваться грузы9. На кронштейне4укреплен фотодатчик12, который выдает сигнал на электронный блок14. Амортизатор13служит для остановки груза. По миллиметровой линейке15 определяют начальное и конечное положение грузов. На передней панели электронного блока14имеются индикаторы “ПЕРИОД”, “ВРЕМЯ”, кнопки управления: “СБРОС”, “ПУСК”, “СТОП” и кнопка “СЕТЬ”, которая включает питание блока14. При нажатии на кнопку “СБРОС” происходит обнуление цифровых индикаторов “ПЕРИОД” и “ВРЕМЯ”.
Рассмотрим движение груза в ходе проведения работы (рис.4).
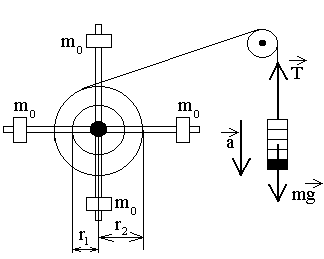
Рис.4
Натяжение нити Тсоздает вращающий момент, равный:
М=Тr, (8)
где r– радиус шкива, на который намотана нить (r1 = 21мм илиr2 = 42мм).
Натяжение нити т можно определить по уравнению движения груза:
тa = mg – T,
откуда:
T = m(g – a), (9)
где а– линейное ускорение движения груза 7.
Линейное ускорение груза 7определяется по времениtего падения с высотыh. Начальная скорость груза7равна нулю, поэтому уравнение его движения имеет вид:
![]()
откуда:
![]() .
(10)
.
(10)
Из соотношений (8), (9) и (10) следует, что вращающий момент, приводящий в движение крестовину, равен:
![]() .
(11)
.
(11)
Для определения времени падения tгруза7используется электронный блок14с закрепленными на нем фотодатчиком12. В блоке14имеется электронный секундомер. Результаты измерения времени выдаются на индикаторе. На крестовине маятника Обербека рядом со шкивом10расположен электромагнит11(рис.3). При включении электромагнита фрикцион прижимается к шкиву10 и прекращает вращение крестовины маятника. При выключении электромагнита его пружина отводит фрикцион от шкива10и крестовина может свободно вращаться. Включение электромагнита производится нажатием кнопки «СТОП». Выключение его производится нажатием кнопки «СБРОС» или «ПУСК».
После нажатия кнопки «СБРОС» наматыванием нити на шкив 10груз7устанавливают на заданную высоту и нажимают кнопку «СТОП». Высоту измеряют от нижней плоскости груза до фотодатчика. При нажатии кнопки «ПУСК» электромагнит11отводит фрикцион от шкива10, крестовина начинает вращаться и груз7начинает опускаться вниз. Одновременно сотключением электромагнита запускается электронный секундомер в блоке 14. Когда груз 7 опустится вниз и перекроет луч света от лампочки к фотодатчику 12, автоматически прекращается работа секундомера и результаты измерения времени падания груза 7 высвечиваются на индикаторе. Измеренные высота h и время t падения груза 7 позволяют по формуле (11) вычислить вращающий момент M, приводящий в движение крестовину маятника Обербека.
Линейноеускорение груза7с помощью нити
сообщает тангенциальное ускорение
точкам, лежащим на ободе шкива10.
Угловое ускорение шкивов связано с
тангенциальным ускорением соотношением:![]() .
.
Если в эту формулу поставить выражение (10), то выражение для углового ускорения крестовины маятника Обербека получается в виде:
![]() .
(12)
.
(12)
Момент инерции Iмаятника Обербека можно определить на основании закона сохранения энергии. В конце падения потенциальная энергия груза7переходит в его кинетическую энергию и в кинетическую энергию вращательного движения крестовины:
![]() .
(13)
.
(13)
Скорость падения груза 7и линейная скорость точек на ободе шкива10равны. Угловая скорость вращения шкива и крестовины в целом связана с линейной скоростью соотношением:
![]() .
.
С учетом этого соотношения формула (13) получается в виде:
![]() .
.
Откуда:
![]() .
(14)
.
(14)
Конечная скорость
![]() падения груза7связана с высотой
его падения соотношением:
падения груза7связана с высотой
его падения соотношением:
![]() .
.
С учетом соотношения (10) эта формула получается в виде:
![]() .
.
Подставляя это соотношение в (14), получим:
![]() .
(15)
.
(15)
По свойству аддитивности момент инерции крестовины равен:
![]() ,
(16)
,
(16)
где I0– момент инерции крестовины без цилиндров9,![]() –cумма моментов инерции
всех четырех цилиндров.
–cумма моментов инерции
всех четырех цилиндров.
Если тело массой mвращается по окружности с радиусом много больше его размеров, то его принимают за материальную точку и его момент инерции вычисляют по формуле:
I=mR2.
Массы m0всех цилиндров взяты одинаковыми и располагаются они на одинаковых расстоянияхRот оси вращения, поэтому сумму их моментов инерции как материальных точек можно представить в виде:
![]() .
(17)
.
(17)
В одной из серий опытов предлагаемой работы цилиндры снимаются с крестовины и по формуле (15) определяется ее момент инерции I0без цилиндров. Затем цилиндры на стержнях закрепляются на одинаковых расстоянияхRот оси вращения и по той же формуле (15) определяется момент инерции крестовиныI, но уже вместе с цилиндрами. Из формулы (16) следует, что сумма моментов инерции цилиндров равна:
![]() .
(18)
.
(18)
Из (17) и (18) следует:
![]() ,
(19)
,
(19)
где I–I0– сумма моментов инерции всех цилиндров, измеренная экспериментально, 4mR2– сумма моментов инерции этих цилиндров, вычисленная теоретически по формуле (17) с допущением, что цилиндры приняты за материальные точки. Если в процессе эксперимента соотношение (19) не выполняется, это значит, что на установленных расстоянияхRцилиндров от оси вращения их нельзя принимать за материальные точки.
Порядок выполнения измерений