ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 213
Скачиваний: 0
СОДЕРЖАНИЕ
Обработка результатов измерений
Изучение законов кинематики прямолинейного равнопеременного движения
Обработка результатов измерений
Обработка результатов измерений
Изучение основного закона динамики вращательного движения
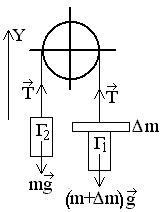
Натяжение нити т можно определить по уравнению движения груза:
Упражнение 1. Проверка второго закона Ньютона для вращательного движения.
В работе следует убедиться, что движение системы при фиксированной массе перегрузка mявляется равноускоренным. Для этого нужно экспериментально проверить выполнение зависимости (9), которую перепишем в виде:
![]() .
(10)
.
(10)
Из этого соотношения ясно, что в осях х=t2иy= 2Sполученная прямая, проходящая через начало координат, соответствует равноускоренному движению, а тангенс угла наклона к осихравен ускорению тела.
Порядок выполнения измерений
1. Положив на правый груз Г1перегрузокm, переместить его в верхнее положение и нажать кнопку «СТОП».
2. При помощи кронштейна 4установить расстояние от нижней плоскости перегрузкаm до фотодатчика8, заданное преподавателем.
3. Нажать кнопку «ПУСК».
4. Как только груз Г1пройдет мимо кронштейна4нажать кнопку «СТОП».
5. По электронному блоку 10отсчитать время падения груза.
6. Повторить пункты 1 – 5 четыре раза.
7. Повторить пункты 1 – 6 для других расстояний.
8. Результаты измерений записать в таблицу.
Обработка результатов измерений
1. Рассчитать среднее время падения грузов и абсолютную погрешность этого измерения для всех высот. Полученные данные занести в таблицу 1.
2. По формуле (9) рассчитать ускорения груза апри оценить доверительный интервалапрэтого измерения по каждой высоте. Полученные данные занести в таблицу 1.
3. Рассчитать
средние значения ускорения
![]() и абсолютной погрешности
и абсолютной погрешности![]() .
На их основании рассчитать относительную
погрешность ускоренияпр.
.
На их основании рассчитать относительную
погрешность ускоренияпр.
4. Построить график функции (10) в предложенных координатах.
5. По тангенсу наклона прямой определить ускорение агр.
6. Сравнить результаты, полученные аналитически и графически. Для сравнения необходимо рассчитать относительную погрешность по формуле:
![]()
7. Провести сравнение полученных результатов ускорения априагрпри помощи координатной оси.
8. Сделать вывод о проделанной работе с указанием полученных результатов измерений и их обработки (окончательный ответ).
Таблица
|
№ |
S, м |
ΔS, м |
t1, с |
t2, с |
t3, с |
t4, с |
|
Δt, с |
апр, м/с2 |
Δапр, м/с2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
1. Какое движение называется поступательным, а какое – вращательным?
2. Дать определения траектории, пути и перемещения.
3. Дать понятие скорости и ее видов.
4. Дать понятие ускорения и его видов.
5. Какие виды поступательного движения существуют?
6. Равнопеременное движение и его виды.
7. Вывести законы равнопеременного движения.
Лабораторная работа № 1.3
Изучение основного закона динамики
поступательного движения
Цель работы: экспериментальное изучение и проверка второго закона Ньютона.
Введение
Основным законом динамики поступательного движения является второй закон Ньютона, который в интегральной форме имеет вид:
![]() (1)
(1)
т.е.
ускорение тела прямо пропорционально
силе действующей на это тело и обратно
пропорционально его массе.Величина![]() – есть равнодействующая всех сил,
действующих на это тело.
– есть равнодействующая всех сил,
действующих на это тело.
По определению мгновенное ускорение есть первая производная от мгновенной скорости по времени:
![]() (2)
(2)
Тогда:
![]()
![]() .
(3)
.
(3)
Отсюда:
![]() ,
,
где m– масса тела, служащая мерой его инертности,v– мгновенная скорость тела при прямолинейном движении.
Полагая, что m=constполучаем:
![]() (4)
(4)
где
![]() – импульс силы,
– импульс силы,![]() – импульс тела.
– импульс тела.
Соотношение (4) носит название второго закона Ньютона в импульсной (дифференциальной) форме: всякое изменение импульса тела равно импульсу равнодействующей силы.
Описание установки
Установка включает в себя машину Атвуда, электронный блок и набор перегрузков.
Общий вид установки изображен на рис. 1. Установка состоит из основания 2, на вертикальной стойке1которого размещены верхний5, средний4и нижний3кронштейны. На верхнем кронштейне5крепится блок, через который перекинута нить6с грузамиГ1иГ2одинаковой массы. Электромагнит7с помощью фрикциона удерживает блок в неподвижном состоянии. На среднем кронштейне4установлен фотодатчик8, подающий сигнал для окончания счета времени движения грузов. Средний кронштейн имеет индекс, положение которого совпадает с оптической осью фотодатчика (риска на корпусе). На площадке нижнего кронштейна3имеется амортизатор для остановки груза. Кронштейны3и4могут свободно перемещаться и фиксироваться на вертикальной стойке1по всей ее свободной длине. По миллиметровой линейке9определяют начальное и конечное положение грузов и пройденный ими путь.
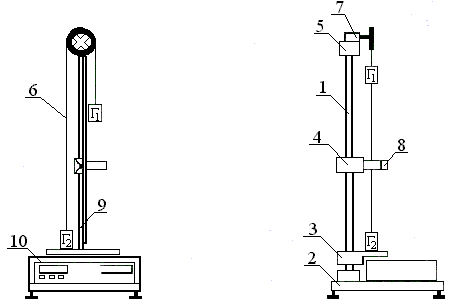
Рис. 1. Общий вид установки
На передней панели электронного блока 10имеются индикаторы “ПЕРИОД”, “ВРЕМЯ”, кнопки управления: “СБРОС”, “ПУСК”, “СТОП” и кнопка “СЕТЬ”, которая включает питание блока10. При нажатии на кнопку “СБРОС” происходит обнуление цифровых индикаторов “ПЕРИОД” и “ВРЕМЯ”. ГрузГ1фиксируется нажатием кнопки “СТОП” на заданной высоте. При нажатии кнопки “ПУСК” грузы начинают двигаться, а таймер отсчитывает время; при пересечении правым грузом оптической оси фотодатчика счет времени прекращается, а на цифровом индикаторе “ВРЕМЯ” высвечивается время равноускоренного движения груза. Для нового запуска следует сначала поднять грузГ1на необходимую высоту, нажать кнопки “СБРОС ”и “СТОП”, а затем кнопку “ПУСК”.
Рис.2.
Схема подвески грузов с перегрузком