ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 100
Скачиваний: 0
СОДЕРЖАНИЕ
Выбор предохранителей производится:
Выбор тепловых реле производится:
Выбор автоматических выключателей производится :
Указания и порядок выполнения работы.
Лабораторная работа № 2 исследование характеристик двигателей постоянного тока
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 3 исследование характеристик асинхронного двигателя с короткозамкнутым ротором
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 4 режимы пуска и динамического торможения асинхронных электродвигателей
Контрольные вопросы
1. Перечислите основные средства защиты электроприемников.
2. Как устроена и для чего применяется плавкая вставка ?
3. Как устроено и для чего применяется тепловое реле ?
4. Какие функции защиты выполняет автоматический выключатель ?
5. Что называется защитной характеристикой ?
6. Как выбирается плавкая вставка для защиты одного электродвигателя и для защиты группы потребителей ?
7. Как выбирается тепловое реле ?
8. Как выбирается автоматический выключатель ?
9. Как осуществить настройку защиты одного электродвигателя от перегрузки ?
10. Как включается в электрическую схему для защиты электродвигателя от перегрузки тепловое реле магнитного пускателя ?
Лабораторная работа № 2 исследование характеристик двигателей постоянного тока
ЦЕЛЬ РАБОТЫ. Изучить устройство, принцип работы ДПТ с параллельной, последовательной и смешанной обмотками возбуждения, способы пуска и принципы регулирования частоты вращения ДПТ, ознакомиться с тормозными режимами работы ДПТ.
ПРОГРАММА РАБОТЫ.
1. Изучить устройство и принцип работы ДПТ с различными схемами включения ОВ.
2. Ознакомиться с экспериментальными механическими характеристиками ДПТ с параллельной ОВ и со смешанной ОВ в различных рабочих режимах.
3. Рассчитать и построить механические характеристики ДПТ с параллельной ОВ при работе в двигательном режиме, режиме динамического торможения и торможения противовключением.
Основные теоретические положения.
В сельскохозяйственном производстве электродвигатели постоянного тока (ДПТ) широко применяются на мобильных машинах, в испытательных стендах и установках, а также на стационарных объектах. Конструктивно ДПТ, независимо от схемы включения их обмоток, состоят из неподвижного статора (с размещенными на нем обмотками возбуждения) и вращающегося якоря (с обмоткой якоря). Напряжение питания на обмотки возбуждения и якоря подается от источника постоянного тока. Ток, протекающий по обмотке возбуждения, создает внутри статора неподвижное магнитное поле. Это поле взаимодействует с током якоря и создает вращающий электромагнитный момент на якоре, т. е. происходит преобразование электрической энергии в механическую энергию. Для получения вращающего момента при любом угле поворота якоря, на нем расположено несколько одинаковых обмоток. В любой момент подключенной к сети может быть только одна из обмоток якоря. Это подключение осуществляется с помощью ламелей коллектора (к ним подсоединены обмотки якоря) и щеточного механизма, осуществляющего коммутацию обмоток якоря при вращении.
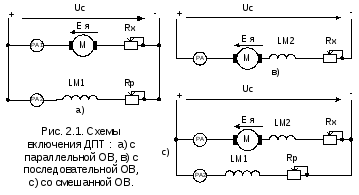
В зависимости от схемы соединения обмотки возбуждения (ОВ) и обмотки якоря ДПТ (рис.2.1) могут быть с параллельной обмоткой ОВ, с последовательной ОВ и со смешанной ОВ.
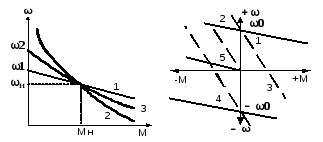
Механические характеристики ДПТ в двигательном режиме работы с различными схемами включения ОВ приведены на рис. 2.2. С целью наглядности они построены для двигателей, имеющих одинаковые значения номинального момента - Мн и номинальной частоты вращения ротора – ωн; где
ω1 = ωо = (1,05 … 1,1) ωн – для ДПТ с параллельной ОВ;
ω2 = ωо = (1,7… 2,0) ωн – для ДПТ со смешанной ОВ;
ωо – скорость идеального холостого хода двигателя.
Механические характеристики ДПТ с параллельной ОВ в различных режимах работы приведены на рис.2.3, где 1 – двигательный режим работы; 2 – режим генераторного торможения; 3 – тормозной спуск; 4 – торможение противовключением; 5 – динамическое торможение.
|
Рис. 2.2. Характеристики ДПТ: 1 – с параллельной ОВ; 2 – с последовательной ОВ; 3 – со смешанной ОВ. |
Рис. 2.3 Режимы работы ДПТ с параллельной ОВ: - естественные и _ _ _ - искусственные механические характеристики. |
Уравнения механической - ω = f(M) и электромеханической – ω = f(I) характеристик ДПТ с любой схемой соединения его ОВ выводятся из следующих соотношений
Uc = Eя + Iя (Rя + Rx), (2.1)
Eя = k Ф ω, (2.2)
M = k Ф Iя, (2.3)
где Uc - напряжение сети, поданное на якорь двигателя, В; Eя – электродвижущая сила (ЭДС), наводящаяся во вращающемся якоре ДПТ от магнитного поля, создаваемого ОВ, В; М – вращающий электромагнитный момент двигателя, Нм; Iя – величина тока в цепи якоря, А; Rя – внутреннее активное сопротивление якорной цепи, включая обмотки якоря, компенсационных и дополнительных полюсов и щеточных контактов, Ом; Rx – внешнее активное сопротивление, включенное последовательно с обмоткой якоря, Ом; k – конструктивный коэффициент двигателя, Вс / Вб); Ф – магнитный поток, создаваемый ОВ, Вб; ω – угловая частота вращения якоря, 1/c.
Уравнение механической характеристики ДПТ
ω
= (2.4)
(2.4)
Уравнение электромеханической характеристики ДПТ
ω
=
 ,
(2.5)
,
(2.5)
Характеристики ДПТ, построенные согласно 2.4 и 2.5, имеют один и тот же вид, поэтому в дальнейшем рассматриваются лишь механические характеристики двигателей.
Механические характеристики, полученные при отсутствии внешнего сопротивления в якорной цепи (при Rx = 0), номинальном значении напряжения питания и номинальном магнитном потоке возбуждения, называются естественными – «емх», а все остальные – являются искусственными механическими характеристиками.
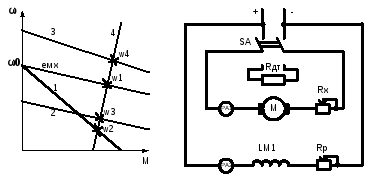
В двигательном режиме работы «емх» ДПТ с параллельной ОВ (рис.2.1, а) согласно 2.4 имеет вид прямой (кривая 1, рис.2.2). Ее можно рассчитать и построить по номинальным паспортным данным двигателя. Искусственные механические характеристики можно получить, изменяя следующие параметры двигателя (рис.2.4): Rx - кривая 1, Uя – кривая 2, Rp – кривая 3. Как следует из этого рисунка, изменяя те же параметры, можно регулировать угловую частоту вращения ДПТ: на рис.2.4 кривая 4 представляет собой механическую характеристику рабочей машины, ее пересечение с кривыми «емх», 1, 2 и 3 показывает рабочие точки электропривода – ω1, ω2, ω3, ω4.
|
Рис. 2.4. Искусственные механические характеристики ДПТ с параллельной ОВ. |
Рис. 2.5. Схема включения ДПТ с параллельной ОВ для работы в режиме динамического торможения. |
Анализ механических и электромеханических характеристик ДПТ позволяет сделать следующие выводы:
- на «емх» при пуске двигателя возникают большие токи в якорной цепи;
- введение сопротивления в цепь якоря двигателя (Rx > 0) уменьшает жесткость характеристик и снижает пусковой ток;
- уменьшение напряжения питания на якоре двигателя перемещает его характеристики параллельно «емх» вниз, пропорционально Uc;
- уменьшение напряжения на ОВ двигателя приводит к пропорциональному уменьшению тока в ней и, как следствие, снижению магнитного потока (Ф), т.е. возрастанию угловой частоты вращения якоря ω.
ДПТ с параллельной ОВ может работать (рис.2.3) как в основном режиме – двигательном (ДР), так и в тормозных режимах, в том числе генераторного торможения (ГТ), торможения противовключением (ПВ), динамического торможения (ДТ) и тормозного спуска (ТС).
Uc
= Const;
ω
ωо,
Iя
– меняет знак
на противоположный
(
-
Iя
);
Мт
= к
Ф (-
Iя)
–
тормозной момент;
 ;
Ея
Uс,
;
Ея
Uс,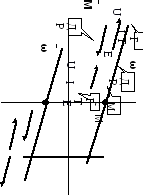 1.
Генераторное торможение
(ГТ) с отдачей энергии в сеть.
Тормозной
режим получается при постоянном
напряжении сети (Uс
= Сonst)
и активном моменте на валу ЭД, обусловленным
опускающимся грузом. В результате,
угловая скорость
якоря ω,
становится больше
скорости идеального холостого хода
ωо,
т.е.
ω
ωо.
При
этом ЭДС
якоря
Ея
становится
больше приложенного напряжения сети
Uс,
т.е.
Ея
Uс
и ток якоря
Iя
под воздействием
ЭДС меняет свой знак на противоположный
(- Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт.
Электродвигатель начинает работать
в режиме генератора параллельно с сетью,
которой он отдает электроэнергию.
1.
Генераторное торможение
(ГТ) с отдачей энергии в сеть.
Тормозной
режим получается при постоянном
напряжении сети (Uс
= Сonst)
и активном моменте на валу ЭД, обусловленным
опускающимся грузом. В результате,
угловая скорость
якоря ω,
становится больше
скорости идеального холостого хода
ωо,
т.е.
ω
ωо.
При
этом ЭДС
якоря
Ея
становится
больше приложенного напряжения сети
Uс,
т.е.
Ея
Uс
и ток якоря
Iя
под воздействием
ЭДС меняет свой знак на противоположный
(- Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт.
Электродвигатель начинает работать
в режиме генератора параллельно с сетью,
которой он отдает электроэнергию.
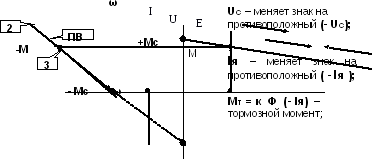 2.
Торможение противовключением (ПВ).
Искусственное
изменение полярности (плюс на минус):
Uс
- меняет
знак на противоположный
(- Uс),
направление ЭДС
Ея
не изменяется и
совпадает с
направлением напряжения Uс.
Ток якоря
Iя
меняет знак
на противоположный (-
Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт
- точка 2, быстрая остановка электродвигателя,
точка 3.
2.
Торможение противовключением (ПВ).
Искусственное
изменение полярности (плюс на минус):
Uс
- меняет
знак на противоположный
(- Uс),
направление ЭДС
Ея
не изменяется и
совпадает с
направлением напряжения Uс.
Ток якоря
Iя
меняет знак
на противоположный (-
Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт
- точка 2, быстрая остановка электродвигателя,
точка 3.
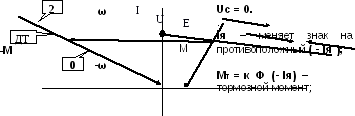 3.
Динамическое торможение (ДТ). Обмотка
якоря отключается от сети и замыкается
на внешнее сопротивление Rx,
т.е. Uc
= 0. Обмотка возбуждения
остается подключенной к номинальному
напряжению Uс.
Якорь продолжает вращаться за счет
запасенной кинетической энергии, как
и в двигательном режиме, поэтому
направление ЭДС Ея
не изменяется (остается), а ток якоря Iя
меняет знак
на противоположный (-
Iя),
т.к. напряжение
на обмотке якоря равно нулю -
Uоя
= 0.
Поэтому электромагнитный
момент становится
тормозным -
Мт
- (участок 2 - 0).
3.
Динамическое торможение (ДТ). Обмотка
якоря отключается от сети и замыкается
на внешнее сопротивление Rx,
т.е. Uc
= 0. Обмотка возбуждения
остается подключенной к номинальному
напряжению Uс.
Якорь продолжает вращаться за счет
запасенной кинетической энергии, как
и в двигательном режиме, поэтому
направление ЭДС Ея
не изменяется (остается), а ток якоря Iя
меняет знак
на противоположный (-
Iя),
т.к. напряжение
на обмотке якоря равно нулю -
Uоя
= 0.
Поэтому электромагнитный
момент становится
тормозным -
Мт
- (участок 2 - 0).
 4.
Тормозной спуск (ТС). Мс
Мдв. Под действием
груза изменяется Мс
в сторону увеличения и становится больше
момента, развиваемого электродвигателем,
т.е. Мс
Мдв. При этом
напряжение сети Uс
и
ЭДС
Ея
по направлению
совпадают,
а
ЭДС Ея
и
угловая частота
вращения якоря
ω
меняют знак на
противоположный. Тормозной спуск (ТС)
соответствует точкам 3-4.
4.
Тормозной спуск (ТС). Мс
Мдв. Под действием
груза изменяется Мс
в сторону увеличения и становится больше
момента, развиваемого электродвигателем,
т.е. Мс
Мдв. При этом
напряжение сети Uс
и
ЭДС
Ея
по направлению
совпадают,
а
ЭДС Ея
и
угловая частота
вращения якоря
ω
меняют знак на
противоположный. Тормозной спуск (ТС)
соответствует точкам 3-4.
Мс Мдв;
 .
.
ω – меняет знак на противоположный ( - ω );
Ея = к Ф (- ω).
Одно из ценных свойств ДПТ с параллельной ОВ заключается в том, что скорость его вращения ω очень мало зависит от нагрузки. Электродвигателю присущи высокая перегрузочная способность и широкий диапазон регулирования угловой частоты вращения ω.
В двигательном режиме (ДР) направление момента М совпадает с направлением угловой частоты вращения ω, а ЭДС Ея направлена на встречу току якоря Iя.
В тормозных режимах момент М направлен на встречу угловой частоте вращения ω, а направление ЭДС Ея совпадает с направлением тока якоря Iя.
На рис. 2.6. представлена сводная диаграмма основных режимов работы ДПТ с параллельной ОВ, на которой представлено распределение приложенного напряжения Uс, ЭДС Ея и тока якоря Iя.
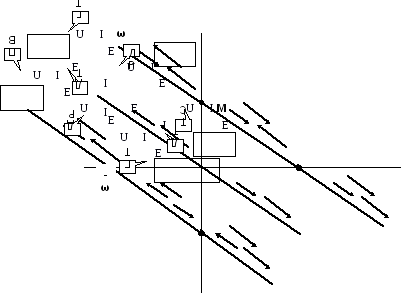
Рис. 2.6. Диаграмма режимов работы ДПТ с параллельной ОВ
Для всех схем включения ДПТ, приведенных на рис.2.1, величина тока в цепи якоря определяется по выражениям:
при работе в двигательном режиме и в режиме генераторного торможения
 , А (2.6)
, А (2.6)
(в двигательном режиме Uc > Eя и энергия потребляется из сети, в генераторном – Uc < Eя и энергия отдается в сеть);
при работе в режиме динамического торможения (сеть отключена – Uc = 0)
 , А (2.7)
, А (2.7)