ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 149
Скачиваний: 0
СОДЕРЖАНИЕ
Выбор предохранителей производится:
Выбор тепловых реле производится:
Выбор автоматических выключателей производится :
Указания и порядок выполнения работы.
Лабораторная работа № 2 исследование характеристик двигателей постоянного тока
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 3 исследование характеристик асинхронного двигателя с короткозамкнутым ротором
Основные теоретические положения.
Указания и порядок выполнения работы.
Лабораторная работа № 4 режимы пуска и динамического торможения асинхронных электродвигателей
при работе в режиме торможения противовключением (изменена полярность Uc)
 , А (2.8)
, А (2.8)
при работе в режиме тормозного спуска
 , А (2.9)
, А (2.9)
Механические характеристики ДПТ с последовательной ОВ и со смешанной ОВ, как следует из уравнений 2.1…2.3, являются нелинейными. Их нелинейность объясняется тем, что последовательно с обмоткой якоря включена обмотка возбуждения, по которой протекает ток нагрузки. Следовательно, магнитный поток этих двигателей зависит от величины тока якоря и является переменной величиной. Поэтому системы уравнений 2.4 и 2.5 , описывающие характеристики двигателей, являются нелинейными (нелинейность объясняется наличием цепей намагничивания двигателя, которые не имеют аналитического описания). Эти уравнения дают лишь представление о характере электромеханической и механической характеристик данных двигателей.
В целом, механические характеристики ДПТ с последовательной ОВ и со смешанной ОВ аналогичны механическим характеристикам ДПТ с параллельной ОВ, приведенным на рис.2.3.
В них имеются два принципиальных отличия.
Во-первых, это нелинейные
характеристики – как показано на
рис.2.2. Во-вторых, у ДПТ с последовательной
ОВ отсутствует скорость идеального
холостого хода ωо
(при М
 0 -Iв
= Iя
0 -Iв
= Iя
 0 и, как следствие,
Ф
0 и, как следствие,
Ф
 0, где Iв
– величина тока в обмотке возбуждения,
следовательно - ω
0, где Iв
– величина тока в обмотке возбуждения,
следовательно - ω ).
Поэтому у этих двигателей неосуществим
режим генераторного торможения, переход
в который возможен только при увеличении
угловой частоты вращения якоря до
величины, большей скорости холостого
хода. ДПТ с последовательной ОВ нельзя
эксплуатировать при нагрузке, меньшей
25…30 % от номинальной (иначе угловая
частота вращения якоря превысит в
несколько раз номинальную скорость
вращения и двигатель пойдет «вразнос»).
).
Поэтому у этих двигателей неосуществим
режим генераторного торможения, переход
в который возможен только при увеличении
угловой частоты вращения якоря до
величины, большей скорости холостого
хода. ДПТ с последовательной ОВ нельзя
эксплуатировать при нагрузке, меньшей
25…30 % от номинальной (иначе угловая
частота вращения якоря превысит в
несколько раз номинальную скорость
вращения и двигатель пойдет «вразнос»).
К преимуществам этих ДПТ
относятся возможность плавного разгона
двигателей в зоне больших нагрузок, а
также не критичность к перегрузкам. У
ДПТ с параллельной ОВ величина тока в
якорной цепи пропорциональна моменту
нагрузки (т.е. I
 М), а ДПТ с
последовательной ОВ и со смешанной ОВ
– I
М), а ДПТ с
последовательной ОВ и со смешанной ОВ
– I
 .
Поэтому они менее критичны к перегрузкам
и используются в качестве тягового
электропривода. Для всех типов ДПТ при
мощности более 1 кВт требуется осуществлять
ограничение пусковых токов и моментов,
как в режиме трогания, так и в тормозных
режимах работы. Это достигается включением
последовательно с обмоткой якоря
добавочного сопротивления Rx,
выбираемого таким образом, чтобы
максимальные величины тока якоря и
момента не превышали в 2,0…2,5 раза их
номинальных паспортных значений.
.
Поэтому они менее критичны к перегрузкам
и используются в качестве тягового
электропривода. Для всех типов ДПТ при
мощности более 1 кВт требуется осуществлять
ограничение пусковых токов и моментов,
как в режиме трогания, так и в тормозных
режимах работы. Это достигается включением
последовательно с обмоткой якоря
добавочного сопротивления Rx,
выбираемого таким образом, чтобы
максимальные величины тока якоря и
момента не превышали в 2,0…2,5 раза их
номинальных паспортных значений.
Направление вращения ДПТ считается правым, когда якорь двигателя вращается по часовой стрелке, если смотреть со стороны конца приводного вала. При вращении вала против часовой стрелки направление вращения считается левым. Изменение направления вращения ДПТ осуществляется только за счет изменения полярности напряжения питания в цепи якоря. Изменение направления вращения ДПТ за счет изменения полярности напряжения питания в цепи параллельной ОВ проводить не рекомендуется. Во время работы ДПТ запрещается обесточивать его параллельную ОВ.
Указания и порядок выполнения работы.
1. Ознакомиться со стендом лабораторной установки, состоящим из: QF1 – автоматического выключателя, предназначенного для подачи напряжения постоянного тока 220 В на двигатель; QF2 – автоматического выключателя, предназначенного для подачи напряжения постоянного тока 110 В на электромагнитный тормоз; М – ДПТ с обмотками возбуждения LM1 (параллельная ОВ) и LM2 (последовательная ОВ); YB – электромагнитного тормоза, установленного на валу ДПТ и создающего момент сопротивления нагрузки; РА1 и РА2 – амперметров, включаемых в соответствующие цепи ДПТ; ВR – тахогенератора, установленного на валу двигателя; SA – переключателя режимов работы двигателя; Rx, Rp, Rдт, Rт – реостатов, включаемых в соответствующие цепи ДПТ.
2. Собрать схему согласно рис. 2.1,а для снятия характеристик ДПТ с параллельной ОВ (подключить его к источнику напряжения 220В от автоматического выключателя QF1). Подключить к источнику напряжения 110 В (от автоматического выключателя QF2) через реостат Rт электромагнитный тормоз YB. Полностью ввести реостат Rx (т.е. его сопротивление должно быть наибольшим), вывести реостат Rp (т.е. его сопротивление должно быть равным нулю) и ввести реостат Rт. Подать напряжение питания на двигатель, включив QF1. Осуществить пуск двигателя, постепенно вводя реостат Rx так, чтобы ток в цепи якоря (показания амперметра РА1) не превышал в 2,5 раза номинального значения. Включить QF2 и реостатом Rт изменять нагрузку на валу двигателя. Осуществить регулирование угловой частоты вращения двигателя в соответствии с указаниями таблицы 2.1. Показания тахометра BR записать в табл. 2.1. Отключить QF1 и QF2, разобрать схему за исключением цепи питания электромагнитного тормоза YB.
Таблица 2.1
|
Условие |
ω, 1/c |
||||||
|
ДПТ с параллельной ОВ |
ДПТ со смешанной ОВ |
||||||
|
холостой ход |
под нагрузкой |
∆ω |
холостой ход |
под нагрузкой |
∆ω |
||
|
Rx=max, Rp= 0 |
|
|
|
|
|
|
|
|
Rx = 0, Rp = 0 |
|
|
|
|
|
|
|
|
Rx = 0, Rp=max |
|
|
|
|
|
|
|
3. Собрать схему согласно рис. 2.1,с для снятия характеристик ДПТ со смешанной ОВ. Аналогично пункту 2 осуществить пуск двигателя. Осуществить регулирование угловой частоты вращения двигателя в соответствии с указаниями таблицы 2.1. Показания тахометра BR записать в табл. 2.1. Отключить QF1 и QF2, разобрать схему, включая цепи питания электромагнитного тормоза YB.
4. Собрать схему согласно рис. 2.5 для изучения режима динамического торможения ДПТ с параллельной ОВ. Переключатель SA установить в верхнее по схеме положение. Аналогично пункту 2 осуществить пуск двигателя. Записать значение начальной угловой частоты вращения при Rx = 0 и Rp = 0 – ω нач. Полностью ввести реостат Rx. Для перевода двигателя в режим динамического торможения необходимо быстро перевести переключатель SA из верхнего по схеме положения в нижнее положение. При этом якорная цепь двигателя будет отключена от источника питания и окажется замкнутой на сопротивления Rx и Rдт. Экспериментально установить влияние на время динамического торможения двигателя величины суммарного сопротивления в цепи якоря и величины тока в обмотке возбуждения. В начальный момент торможения зафиксировать значение тока в якоре по амперметру РА1, во всех опытах величина тока не должна превышать в 2,5 раза номинальное значение. Отключить QF1 и разобрать схему.
5. Собрать схему согласно рис. 2.7 для изучения режима торможения противовключением ДПТ с параллельной ОВ. Переключатель SA установить в верхнее по схеме положение. Аналогично пункту 2 осуществить пуск двигателя. Установить реостат Rx в среднее положение. Для перевода двигателя в режим торможения противовключением необходимо быстро перевести переключатель SA из верхнего по схеме положения в нижнее положение. Экспериментально установить влияние на время торможения противовключением двигателя величины суммарного сопротивления в цепи якоря и величины тока в обмотке возбуждения. В начальный момент торможения зафиксировать значение величины тока в якоре по амперметру РА1, во всех опытах оно не должно превышать в 2,5 раза номинальное значение. Отключить QF1 и разобрать схему.
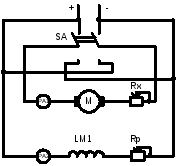 Рис.
2.7. Схема включения ДПТ с параллельной
ОВ для работы в режиме торможения
противовключением.
Рис.
2.7. Схема включения ДПТ с параллельной
ОВ для работы в режиме торможения
противовключением.
ω1=
ωн
=
 ;
(2.10)
;
(2.10)
М1=
Мн
= ;
(2.11)
;
(2.11)
ω2
= ωо
=ωн ;
(2.12)
;
(2.12)
М2 = 0; (2.13)
где ωн – номинальная угловая частота вращения, 1/с; nн - номинальная скорость, об/мин; Мн - номинальный момент, Нм; Рн - номинальная мощность, Вт; Uн – номинальное напряжение, В; Iн – номинальный ток в обмотке якоря, А; Rя – сопротивление обмотки якоря, Ом.
Сопротивление обмотки якоря определяют по выражению
 .
(2.14)
.
(2.14)
7. Построить искусственную механическую характеристику ДПТ с параллельной ОВ в режиме динамического торможения по двум точкам:
ω1 = 0, M1 = 0; (2.15)
ω2 = ωн, М2 = - 2Мн . (2.16)
Величину дополнительного сопротивления Rдт, включаемого в якорную цепь двигателя для получения Мторм = 2Мн, в режиме динамического торможения определяют согласно 2.6, 2.7, 2.14, 2.15, 2.16 из условия
Rдт
=
 .
(2.17)
.
(2.17)
8. Построить искусственную механическую характеристику ДПТ с параллельной ОВ в режиме торможения противовключением по двум точкам:
ω1 = - ωн, М1 = 0; (2.18)
ω2 = ωн, М2 = - 2Мн. (2.19)
Величину дополнительного сопротивления Rx, включаемого в якорную цепь двигателя для получения Мторм = 2Мн, в режиме торможения противовключением определяют согласно 2.8, 2.14, 2.18, 2.19 из условия
Rx
=
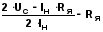 .
(2.20)
.
(2.20)