ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.05.2020
Просмотров: 777
Скачиваний: 14
СОДЕРЖАНИЕ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ (ФИЛИАЛ)
ГОУ ВПО «САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
ФАКУЛЬТЕТ ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ»
2.3 Статические характеристики коммутаторов
Таблица 1 – Допустимые токи нагрузки медных проводов



Рисунок 27 – Базовая конструкция исполнительного элемента
Параметры
катушки:
диаметр рабочего тела
 ,
U
= 12 В, Н =20
мм, Rиэ
= 20 мм, Rрт
= 5 мм,
Dсл
= 40 мм, l
=125,6 мм, n
= 200 , I
= 9 А, lc
= 20мм,
,
U
= 12 В, Н =20
мм, Rиэ
= 20 мм, Rрт
= 5 мм,
Dсл
= 40 мм, l
=125,6 мм, n
= 200 , I
= 9 А, lc
= 20мм,
 =100350
мкГн.
=100350
мкГн.
Рабочий объем исполнительного элемента с учётом данных параметров:
 ,
,

Диаметр провода обмотки катушки составляет также 1 мм.
3.2 Базовая конструкция магнитожидкостного сенсора
Ниже представлены конструкции эквивалента МЖ сенсора.
Металлический шар – цельнометаллический шар с проходящей через него осью.

Рисунок 28 – Эквивалент МЖ сенсора (металлический шар)
Сферическая оболочка.

Рисунок 29 – Эквивалент МЖ сенсора (сферическая оболочка)
Полая сфера, внутреннее пространство которой заполнено магнитной жидкостью. Оболочка выполнена из эластичных материалов.
Металлический диск – цельнометаллический диск с проходящей через него осью.

Рисунок 30 – Эквивалент МЖ сенсора (металлический диск)
Магнитный диск.

Рисунок 31 – Эквивалент МЖ сенсора (магнитный диск)
Магнитное кольцо.

Рисунок 32 – Эквивалент МЖ сенсора (магнитный диск)
В качестве магнитожидкостного сенсора в системе будем использовать упругооболочечный магнитожидкостный сенсор (УОМС). Он представляет собой магнитный стержень, окруженный упругой эластичной оболочкой, заполненной магнитной жидкостью, помещенный в область действия электромагнитного поля.


Рисунок 33 – Упругооболочечный магнитожидкостный сенсор
Подобная технология уже имеет распространение в машиностроении: разработаны МЖ элементы регулирования расхода и давления жидкостей (проточный МЖ регулятор потока, вихревой МЖ клапан, клапан типа «сопло - МЖ заслонка»), элементы измерения и контроля параметров потоков (МЖ расходомер, МЖ плотномер), управляющие электромагнитные оболочки.
В данной работе магнитожидкостные сенсоры являются фактически поршнями пятисекционных насосов, непосредственно создающими гидрав-лический импульс, то есть выполняющими перекачку рабочей жидкости. Пяти секциям соотвествуют 5 катушек генерирующей оболочки. Возбуждась последовательно, они создают переменное по длине исполнительного элемента электромагнитное поле, под действием которого сенсор, волнообразно расширяясь, так же последовательно перемещает рабочую жидкость в пределах этих 5 секций, создавая таким образом гидравлический импульс.
Данная конструкция позволяет при снятии напряжения с последней катушки и подаче его на первую мгновенно переносить «горб» сенсора непосредственно из конца в начало. При использовании сенсора, указанного, например, на рисунке 5, это было бы невозможно, так как потребовалось бы осуществлять последовательное возвратное перемещение сенсора от пятой катушки обратно к первой.
Также магнитожидкостные сенсоры должны удовлетворять следующим условиям:
а) взаимодействие МЖ сенсора с управляющей электромагнитной оболочкой не должно быть контактным;
б) магнитная жидкость для сенсора должна обладать максимальной намагниченностью от 104 до 105 А/м;
в) отклонение характеристик МЖ за время безотказной работы устройства не должно превышать 5 %;
г) упругая оболочка МЖ сенсора должна обладать адгезионной стойкостью к магнитной жидкости;
д) упругая оболочка МЖ сенсора должна быть абсолютно непроница- емой для магнитной жидкости;
е) МЖ сенсоры нечувствительны к полярности управляющего напряжения на обмотках генератора электромагнитного излучения. Направление вектора перемещения МЖ сенсора в электромагнитном поле противоположно градиенту напряженности электромагнитного поля;
ж) статическая характеристика МЖ сенсора в координатах «перемещение-напряжение на обмотках» существенно нелинейна;
з) рабочий диапазон напряжений в режиме штатного перемещения МЖ сенсора составляет от 40 до 50 % от полного диапазона напряжений управления;
и) динамика перемещения МЖ сенсора в электромагнитном поле в штатном режиме такова, что постоянная времени МЖ составляет от 50 до 100 мсек/см3. Это означает, что для создания форсировочных режимов, вы-званных ситуационным жизненным форс-мажором пациента, генерирующая оболочка должна иметь на каждый см3 магнитной жидкости в МЖ сенсоре передаточную функцию форсирующего звена с соответствующей постоянной времени
W(p) = ((0.05-0.1)p+1).
4 ОБОСНОВАНИЕ БАЗОВОЙ ФУНКЦИОНАЛЬНОЙ СХЕМЫ
УПРАВЛЯЕМОГО ИСТОЧНИКА ДЛЯ ПИТАНИЯ
МНОГОСЕКЦИОННОГО ЭЛЕКТРОМАГНИТНОГО ПРИВОДА
Для питания электромагнитного привода необходимо устройство, которое согласно заданному алгоритму подает напряжение на требуемую секцию. Функциональная схема этого устройства представлена на рисунке 34.

ТК – транзисторный ключ, ИЭ – исполнительные элементы.
Рисунок 34 – Функциональная схема управляемого источника для питания
семисекционного электромагнитного привода
Данная функциональная схема включает в себя импульсный источник питания, работающий от сети, имеющий на выходе напряжение 12 Вольт и ток до 10 Ампер; микроконтроллер, который согласно заданной программе посылает управляющие импульсы на транзисторные ключи.
Программа микроконтроллера управляет портом В. Коммутация происходит по обратной логике, то есть, при наличии низкого уровня сигнала на ножке микропроцессора происходит коммутация соответствующей нагрузки. В этом случае транзисторный ключ (на биполярном транзисторе) закрывается, и через резистор начинает заряжаться затвор полевого силового ключа. В итоге на нагрузку подается рабочее напряжение.
5 ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА ИСТОЧНИКА
ПИТАНИЯ
5.1 Описание схемы
Электрическая схема источника для питания многосекционного электромагнитного привода представлена на рисунке 35.
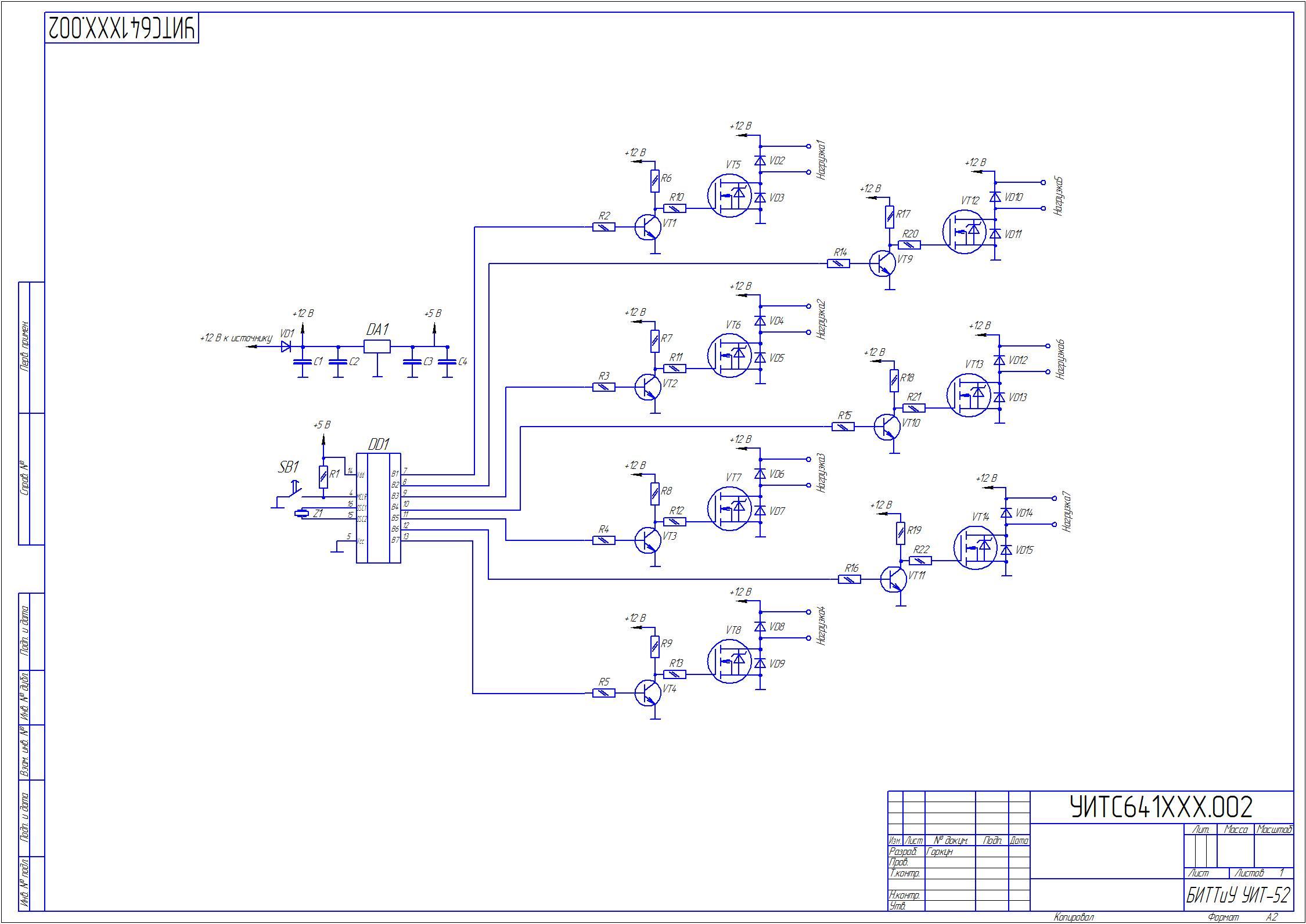
Рисунок 35 – Принципиальная электрическая схема источника питания
5.2 Описание элементов
5.2.1 Микроконтроллер. Схема базируется на микроконтроллере DD1, которым является микросхема PIC16F84A.
Микроконтроллер относится к RISC-типу. Обладает следующими характеристиками:
а) всего 35 простых для изучения инструкций;
б) все инструкции исполняются за один такт, кроме инструкций перехода, выполняемых за два такта;
в) тактовая частота до 20 МГц;
г) минимальная длительность такта 200 нс.
д) 14 битовые команды;
е) 8 битовые данные;
ж) 15 аппаратных регистров специального назначения;
з) 8-уровневый аппаратный стек;
и) прямой, косвенный и относительный режимы адресации для данных и инструкций;
к)
четыре источника прерывания:
1)
внешний вход RB0/INT;
2) переполнение
таймера TMR0;
3) прерывание при изменении
сигналов на линии порта B ;
4) по
завершению записи данных в ЭСППЗУ
(EEPROM);
л) 1000 циклов записи/стирания FLASH памяти программы;
м) 1 000 000 циклов записи/стирания памяти данных ЭСППЗУ;
н) период хранения данных ЭСППЗУ > 40 лет.
Основные параметры микроконтроллера представлены в таблице 2.
Таблица 2 – Основные параметры микроконтроллера PIC16F84A
|
Устройство |
Память программ, слов |
Память данных ОЗУ, байт |
Память данных ЭСППЗУ, байт |
|
PIC16F84A |
1024 FLASH |
68 |
64 |
В состав микроконтроллера входят следующие периферийные устройства:
а) 13 линий ввода/вывода с индивидуальным контролем направления;
б)
сильноточные схемы для управления
светодиодными индикаторами:
1) 25
мА макс. вытек. ток,
2) 25 мА макс. втек.
ток;
в) Timer0: 8-разрядный таймер/счетчик с 8-разрядным программируемым предварительным делителем;
Особенности микроконтроллера:
а) программирование на плате через последовательный порт (ICSPT) (с использованием двух выводов);
б) сброс при включении питания (POR);
в) таймер включения питания (PWRT) и таймер запуска генератора (OST);
г) сброс по падению напряжения питания;
д) сторожевой таймер (WDT) с собственным встроенным RC-генератором для повышения надежности работы;
е) программируемая защита кода;
ж) режим экономии энергии (SLEEP);
з) выбираемые режимы тактового генератора.
Цоколевка.

Рисунок 36 – Цоколевка микроконтроллера PIC16F84A
Технология КМОП, по которой изготовлен микроконтроллер, обладает следующими показателями:
а) экономичная, высокоскоростная технология КМОП ЭСППЗУ;
б) полностью статическая архитектура;
в) широкий рабочий диапазон напряжений питания - от 2,0В до 5,5В;
г) коммерческий, промышленный и расширенный температурный диапазоны;
д)
низкое потребление энергии:
1) менее
2 мА при 5,0 В, 4,0 МГц;
2) 15 мкА (типичное
значение) при 2 В, 32 кГц;
3) менее 0,5 мкА
(типичное значение) в режиме STANDBY при
2В.
Микроконтроллер выпускается в корпусе DIP-20

Рисунок 37 – Габаритные размеры корпуса DIP-20
Регулятор напряжения L7805CV
Регулятор напряжения поддерживает напряжение бортовой сети в заданных пределах во всех режимах работы при изменении частоты вращения ротора генератора, электрической нагрузки, температуры окружающей среды. Кроме того, он может выполнять дополнительные функции — защищать элементы генераторной установки от аварийных режимов и перегрузок, автоматически включать в бортовую сеть силовую цепь генераторной установки или обмотку возбуждения.
L7805CV является регулятором напряжения положительной полярности. При нормальных температурных условиях данные стабилизаторы способны выдавать ток до 1 Ампера.
Несмотря
на то, что данная серия предусмотрена
как фиксированные стабилизаторы, ее
элементы могут использоваться в
совокупности с другими радиоэлементами
с целью изменения значений величин
электрического напряжения и тока.
Таблица
3 – Параметры регулятора напряжения
L7805CV
|
Параметр |
Значение |
|
Корпус |
TO220 |
|
Номинальный выходной ток, А |
1.5 |
|
Максимальное входное напряжение, В |
40 |
|
Выходное напряжение, В |
5 |
5.2.2
Диоды. Диод
выпрямительный кремниевый малой
мощности.
Выпускается
в пластмассовом корпусе DO-41. Обозначение
типа приводится на корпусе.
Полярность
обозначается полосой со стороны
катода.
Является
аналогом диода КД243Ж.
Таблица 4 – Технические параметры диода 1N4007
|
||||||||||||||||||||||||
|
|

Рисунок 38 – Габаритный чертеж и расположение выводов 1N4007
5.2.3 Кварцевый резонатор. Габариты используемого в схеме кварцевого резонатора 4 МГц представлена на следующем рисунке.

Рисунок 39 – Габаритные размеры кварцевого резонатора 4МГц
Таблица 5 – Параметры кварцевого резонатора 4МГц
|
Параметр |
Значение |
|
Частота, МГц |
4 |
|
Емкость нагрузки, пФ |
20 |
|
Рабочая температура, °С |
от -20 до 70 |
|
Температура хранения, °С |
от -40 до 85 |
|
Шунтирующая емкость, пФ |
7 |
|
Уровень управления, мкВт |
100 |