Файл: Лекция 2 по СРВ (Аппаратные средства на нижнем и среднем уровне в СРВ).pdf
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 1976
Скачиваний: 14

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
6
Оптический бесконтактный датчик состоит из двух функциональных узлов,
приемника и излучателя. Данные узлы могут быть выполнены как в одном корпусе, так и
в различных корпусах.
По методу обнаружения объекта фотоэлектрические датчики подразделяются на 4
группы:
1) пересечение луча - в этом методе передатчик и приемник разделены по разным
корпусам, что позволяет устанавливать их напротив друг друга на рабочем расстоянии.
Принцип работы основан на том, что передатчик постоянно посылает световой луч,
который принимает приемник. Если световой сигнал датчика прекращается, в следствии
перекрытия сторонним объектом, приемник немедленно реагирует меняя состояние
выхода.
2) отражение от рефлектора - в этом методе приемник и передатчик датчика
находятся в одном корпусе. Напротив датчика устанавливается рефлектор (отражатель).
Датчики с рефлектором устроены так, что благодаря поляризационному фильтру они
воспринимают отражение только от рефлектора. Это рефлекторы, которые работают по
принципу двойного отражения. Выбор подходящего рефлектора определяется требуемым
расстоянием и монтажными возможностями.
Посылаемый передатчиком световой сигнал отражаясь от рефлектора попадает в
приемник датчика. Если световой сигнал прекращается, приемник немедленно реагирует,
меняя состояние выхода.
3) отражение от объекта - в этом методе приемник и передатчик датчика находятся
в одном корпусе. Во время рабочего состояния датчика все объекты, попадающие в его
рабочую зону, становятся своеобразными рефлекторами. Как только световой луч
отразившись от объекта попадает на приемник датчика, тот немедленно реагирует, меняя
состояние выхода.
4) фиксированное отражение от объекта -принцип действия датчика такой же как и
у "отражение от объекта" но более чутко реагирующий на отклонение от настройки на
объект. Например, возможно детектирование вздутой пробки на бутылке с кефиром,
неполное наполнение вакуумной упаковки с продуктами и т.д.
По своему назначению фотодатчики делятся на две основные группы: датчики
общего применения и специальные датчики. К специальным, относятся типы датчиков,
предназначенные для решения более узкого круга задач. К примеру, обнаружение цветной
метки на объекте, обнаружение контрастной границы, наличие этикетки на прозрачной
упаковке и т.д.
Задача датчика обнаружить объект на расстоянии. Это расстояние варьируется в
пределах 0,3мм-50м, в зависимости от выбранного типа датчика и метода обнаружения.
[
http://electrolibrary.info/subscribe/sub_16_datchiki.htm
]
Микроволновые датчики
На смену кнопочно - релейным пультам приходят микропроцессорные
автоматические системы управления технологическим процессом (АСУ ТП) высочайшей
производительности и надежности, датчики оснащаются цифровыми интерфейсами связи,

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
7
однако это не всегда приводит к повышению общей надежности системы и достоверности
ее работы. Причина заключается в том, что сами принципы действия большинства
известных типов датчиков накладывают жесткие ограничения на условия, в которых они
могут использоваться.
Например, для слежения за скоростью движения промышленных механизмов
широко применяются бесконтактные (емкостные и индуктивные), а также
тахогенераторные устройства контроля скорости (УКС). Тахогенераторные УКС имеют
механическую связь с движущимся объектом, а зона чувствительности бесконтактных
приборов не превышает нескольких сантиметров.
Все это не только создает неудобства при монтаже датчиков, но и существенно
затрудняет использование этих приборов в условиях пыли, которая налипает на рабочие
поверхности, вызывая ложные срабатывания. Перечисленные типы датчиков не способны
напрямую контролировать объект (например, ленту конвейера) - они настраиваются на
движение роликов, крыльчаток, натяжных барабанов и т. д. Выходные сигналы некоторых
приборов настолько слабы, что лежат ниже уровня промышленных помех от работы
мощных электрических машин.
Аналогичные трудности возникают при использовании традиционных
сигнализаторов уровня - датчиков наличия сыпучего продукта. Такие устройства
необходимы для своевременного отключения подачи сырья в производственные емкости.
К ложным срабатываниям приводит не только налипание и пыль, но и прикосновение
потока продукта при его поступлении в бункер. В неотапливаемых помещениях на работу
датчиков влияет окружающая температура. Ложные срабатывания сигнализаторов
вызывают частые остановки и запуски нагруженного технологического оборудования -
основную причину его аварий, приводят к завалам, обрыву конвейеров, возникновению
пожаро- и взрывоопасных ситуаций.
Указанные проблемы несколько лет назад привели к разработке принципиально
новых типов приборов - радиолокационных датчиков контроля скорости, датчиков
движения и подпора, работа которых основана на взаимодействии контролируемого
объекта с радиосигналом частотой около 1010 Гц.
Использование микроволновых методов контроля за состоянием технологического
оборудования позволяет полностью избавиться от недостатков датчиков традиционных
типов.
Отличительными особенностями этих устройств являются:
- отсутствие механического и электрического контакта с объектом (средой),
расстояние от датчика до объекта может составлять несколько метров;
- непосредственный контроль объекта (транспортерной ленты, цепи) а не их
приводов, натяжных барабанов и т. д.;
- малое энергопотребление;
- нечувствительность к налипанию продукта за счет больших рабочих расстояний;
- высокая помехоустойчивость и направленность действия;
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
8
- разовая настройка на весь срок службы;
- высокая надежность, безопасность, отсутствие ионизирующих излучений.
Принцип действия датчика основан на изменении частоты радиосигнала,
отраженного от движущегося объекта. Это явление ("эффект Допплера") широко
используется в радиолокационных системах для дистанционного измерения скорости.
Движущийся объект вызывает появление электрического сигнала на выходе
микроволнового приемо-передающего модуля.
Так как уровень сигнала зависит от свойств отражающего объекта, датчики
движения могут использоваться для того, чтобы сигнализировать об обрыве цепи (ленты),
наличии на конвейерной ленте каких-либо предметов или материалов. Лента имеет
гладкую поверхность и низкий коэффициент отражения. Когда мимо датчика,
установленного над рабочей веткой транспортера, начинает двигаться продукт,
увеличивая коэффициент отражения, прибор сигнализирует о движении, то есть,
фактически о том, что лента не пуста. По длительности выходного импульса можно на
значительном расстоянии судить о размере перемещаемых предметов, производить
селекцию и т.д.
При необходимости заполнить какую-либо емкость (от бункера до шахты) можно
точно определить момент окончания засыпки - опущенный на определенную глубину
датчик будет показывать движение наполнителя до тех пор, пока не будет засыпан.
Конкретные примеры использования микроволновых датчиков движения в
различных отраслях промышленности определяются ее спецификой, но в целом они
способны решать самые разнообразные задачи безаварийной эксплуатации оборудования
и повысить информативность автоматизированных систем управления.
[
http://electrolibrary.info/subscribe/sub_16_datchiki.htm
]
Интеллектуальные датчики
Используемый иногда термин «интеллектуальный датчик» соответствует
компактному, но сложному устройству, содержащему кроме собственно датчика схемы
преобразования сигнала, управляющий микроконтроллер и, возможно, цифровой
интерфейс.
Примеры интеллектуальных датчиков
Самые первые бесконтактные датчики расстояния выдавали информацию только
лишь о наличии или отсутствии предмета перед датчиком в виде дискретного сигнала
ON/OFF. Эти простейшие датчики до сих пор находят огромное применение в различных
областях промышленности. В то же время для решения более сложных задач
автоматизации технологических процессов инженерам нужна дополнительная
информация о положении объектов измерения. Для этих целей были разработаны
датчики, позволяющие определять расстояние до объекта и его положение с помощью
аналогового выхода, сигнал на котором пропорционален расстоянию до измеряемого
объекта. Такие датчики могут быть использованы во множестве применений, таких как
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
9
определение расстояния до объекта, измерение толщины, измерение наклона и
деформации, измерение профиля изделия, центровка и измерение диаметра.
Датчики для измерения расстояния могут использовать различные принципы
измерений: индуктивный, ультразвуковой или оптический, однако все они имеют
электрический выходной сигнал, величина которого пропорциональна расстоянию до
измеряемого объекта. В таблице 1 представлены основные типы аналоговых
бесконтактных датчиков для измерения расстояний и их основные особенности.
[
http://www.gaw.ru/html.cgi/txt/publ/sensor/analog_sensor.htm
]
Промежуточные измерительные преобразователи
Промежуточные измерительные преобразователи – устройства, сохраняющие вид
представления сигнала (например, напряжение остается напряжением) и его форму, но
изменяющие его величину. Они необходимы в тех случаях, когда электрический сигнал,
поступающий с датчика, слишком слаб по величине, либо слишком силен, либо засорен
помехами и т.п. К устройствам этого типа относятся разнообразные усилители,
нормализаторы, фильтры и пр. Нередко они конструктивно входят в состав датчика
(например, мостовая схема подключения термосопротивлений). Как правило,
промежуточные преобразователи тоже имеют функцию преобразования простого вида
, которую можно описать единственным числом – коэффициентом усиления .
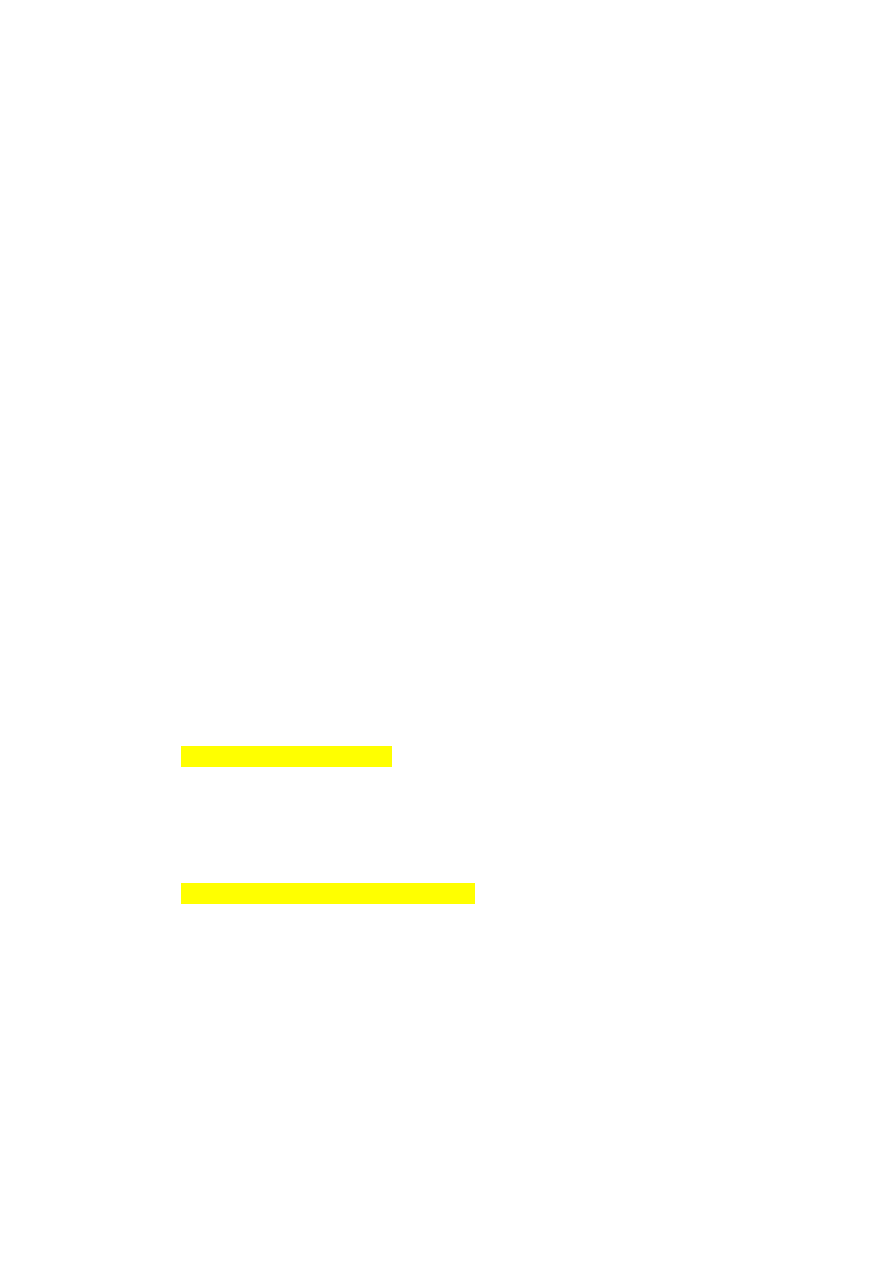
Существуют как простые усилители, представляющие собой электронные схемы на
основе резисторов и операционных усилителей (см. рисунок 1), так и сложные
многофункциональные устройства с программируемым извне или автоматически
настраиваемым коэффициентом усиления.
Рисунок 1 – Простейшие схемы для изменения уровня напряжения
Аналогово-цифровые преобразователи
Аналогово-цифровые преобразователи (АЦП) – устройства, предназначенные для
преобразования значения электрического сигнала в число.
Такое преобразование происходит не мгновенно (этот временной интервал
называется временем преобразования АЦП), поэтому динамически изменяющийся
непрерывный электрический сигнал, поступающий на вход АЦП, на выходе
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
10
преобразуется в дискретную последовательность чисел. Типичное время преобразования
современных АЦП: от 10
-3
до 10
-7
с.
Каждое число на выходе у АЦП представляется конечным количеством двоичных
разрядов (эта характеристика называется разрядностью АЦП), следовательно, множество
всевозможных числовых значений на выходе у АЦП ограничено: например, если
разрядность АЦП N=2, то всего возможно 4 различных результата преобразования (см.
таблицу 1).
Таблица 1 – Возможные значения на выходе двухразрядного АЦП
Разряды числа в двоичной системе счисления
Результат в десятичной
системе счисления
1 (старший разряд)
0 (младший разряд)
0
0
0
0
1
1
1
0
2
1
1
3
Типичные значения разрядности современных АЦП: от 8 до 24.
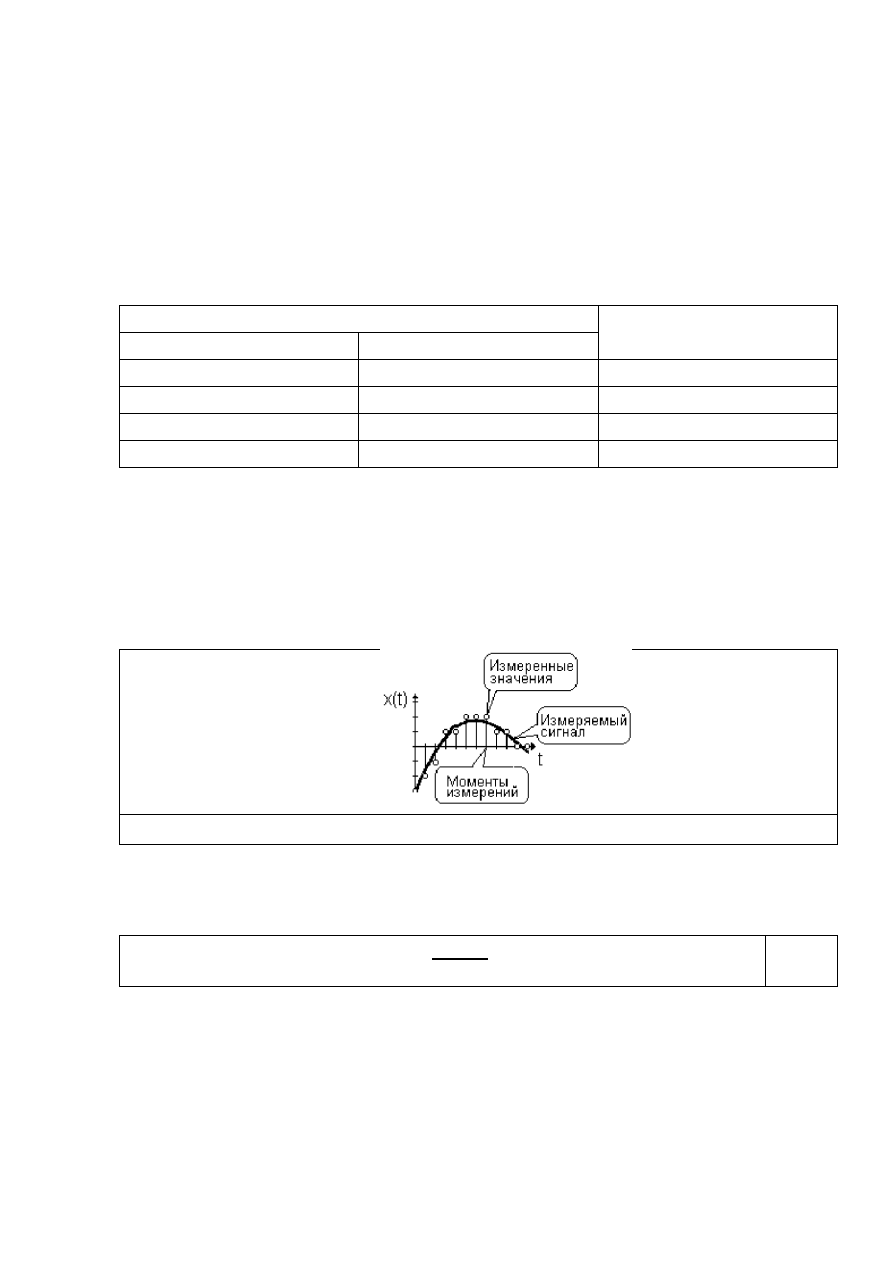
Таким образом, работа АЦП заключается в выполнении двух операций (см.
рисунок 2):
квантование сигнала по уровню;
дискретизация сигнала по времени.
Рисунок 2 – Квантование сигнала по уровню и дискретизация по времени
Функция преобразования АЦП имеет вид «ступенчатой кривой» (см. рисунок 3) и
может быть описана формулой (1):
(
1)
где – преобразуемый электрический сигнал; – числовой результат
преобразования; – величина входного сигнала, соответствующая одному биту (разряду)
выходного числа; – операция округление числа до целого значения.
Таким образом, в любом АЦП происходит преобразование близких значений
электрического сигнала в одно общее числовое значение, что приводит к погрешности
квантования, не превышающей по величине
(см. рисунок 3).