Файл: Лекция 2 по СРВ (Аппаратные средства на нижнем и среднем уровне в СРВ).pdf
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 1975
Скачиваний: 14
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
21
Интерфейсы
Для передачи электрических сигналов между различными устройствами (например,
между датчиком и усилителем или между усилителем и АЦП) используются аналоговые
линии связи, т.е. обычные электрические провода и кабели. В случае же, когда
необходимо передавать цифровую информацию, используются специальные интерфейсы
– комплексы программных и аппаратных средств и протоколов (алгоритмов
взаимодействия), предназначенных для обеспечения конструктивной, электрической и
логической совместимости различных устройств и их компонентов.
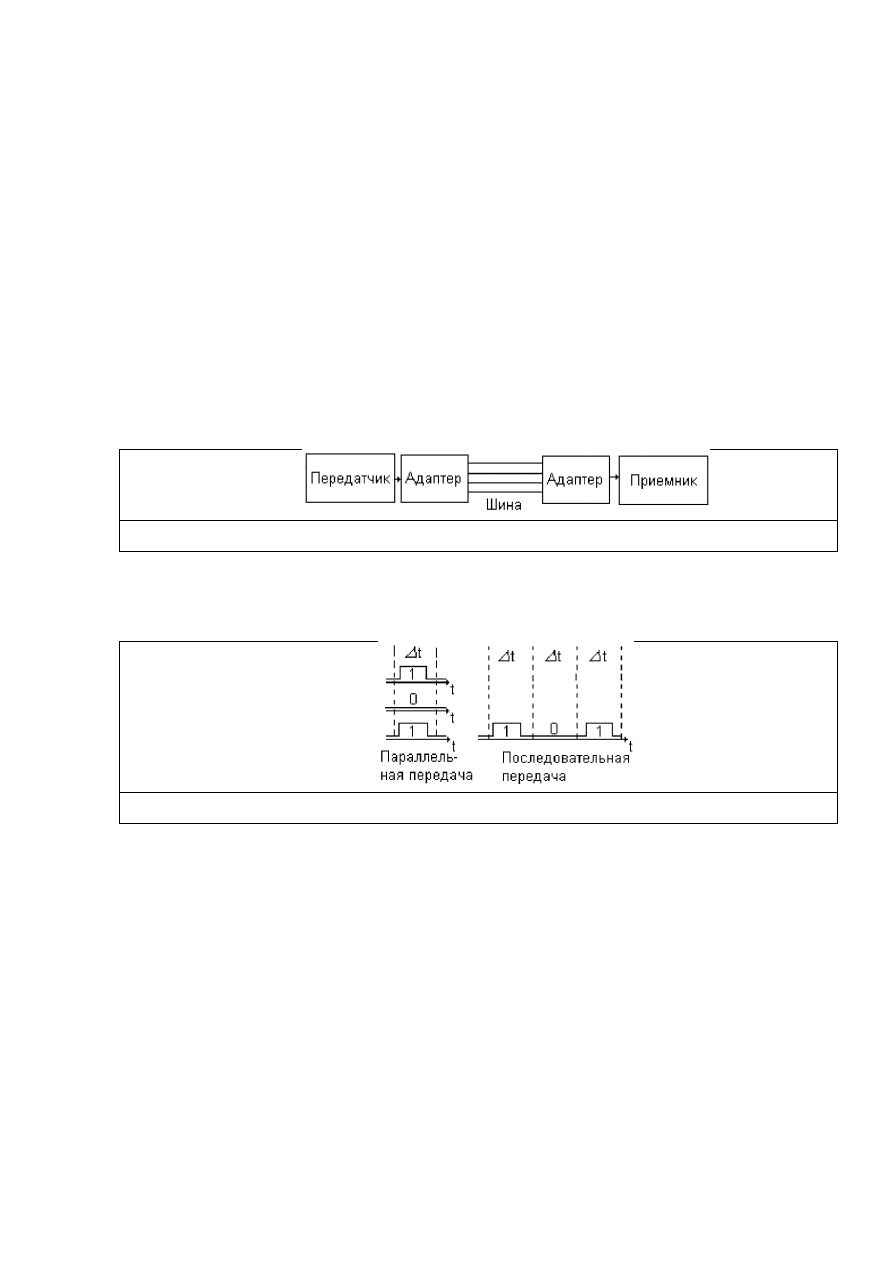
Обычно интерфейс (см. рисунок 4) состоит из:
шины (или магистрали) – набора электрических линий (проводов), по которым
передаются информационные и служебные сигналы;
адаптеров приемника и передатчика – специальных устройств, которые
реализуют протоколы обмена информационными и служебными сигналами.
Рисунок 4 – Интерфейс
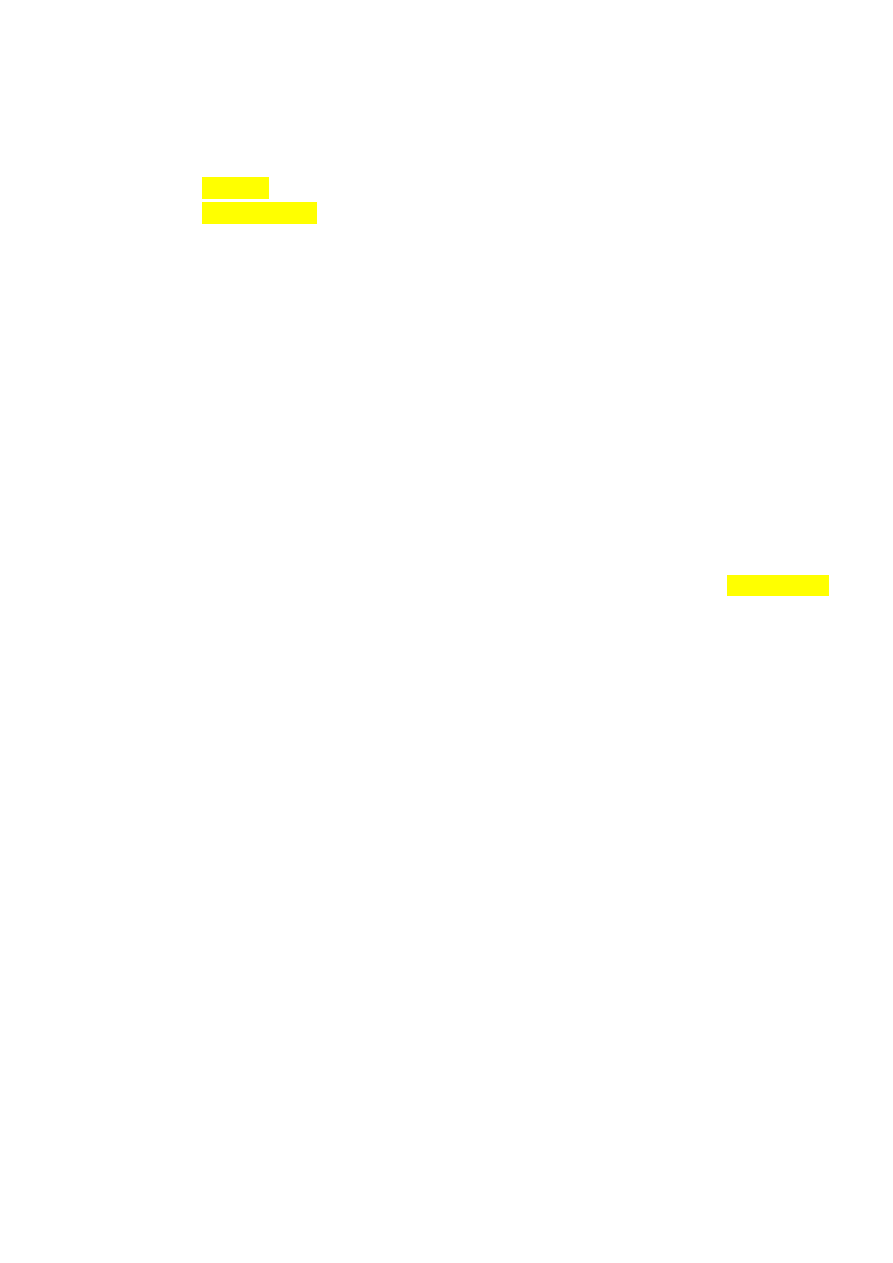
По способу передачи данных по шине интерфейсы можно разделить на
параллельные и последовательные (см. рисунок 5).
Рисунок 5 – Параллельная и последовательная передача данных
Параллельные интерфейсы позволяют передавать элементы информации
(например, отдельные биты) независимо друг от друга по разным линиям шины.
Теоретически, они обеспечивают высокую скорость передачи данных, но сложней в
реализации и использовании. Однако, практической реализации быстрых параллельных
интерфейсов
мешает
эффект
взаимного
электрического
влияния
сигналов,
распространяющихся по соседним линиям шины.
Последовательные интерфейсы передают элементы информации один за другим по
небольшому числу линий (например, всего по одной линии), – этот вид передачи данных
прост и экономичен.
По назначению интерфейсы можно разделить на внутренние (или системные) –
предназначенные для объединения составных частей одного устройства, и внешние –
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
22
предназначенные для организации информационного обмена между независимыми
устройствами.
Среди интерфейсов, используемых в АСУ и СРВ, можно отметить:
RS-232C
RS-485/RS-422
последовательный внешний интерфейс CANbus, часто используемый для
организации распределенных бортовых (автомобильных и авиационных) систем
управления;
последовательный внешний интерфейс Industrial Ethernet, являющийся
оптимизированной под задачи реального времени модификацией сетевого
интерфейса Ethernet;
комбинированный интерфейс HART, позволяющий одновременно передавать
цифровые данные и аналоговые сигналы.
Контроллеры
В зависимости от сложности реализуемой СРВ подбираются контроллеры и
необходимый набор модулей расширения. В качестве контроллеров в СРВ часто
используются программируемые логические контроллеры (ПЛК) – устройства…
Существуют различные варианты исполнения ПЛК.
Контроллеры могут строится как на базе средств вычислительной техники (ЭВМ
с ее стандартными устройствами и интерфейсами) так и специализированных устройств
для связи ЭВМ с объектом.
Виды ПЛК:
OMRON, Siemens Simatic S7, Segnetics, Direct Logic, Mitsubishi FX, Modicon TSX
Quantum, Beckhof.
ПЛК на базе процессора i8088/8086/80186 (ICPDAS, Advantech).
Интеллектуальные реле (Siemens LOGO!, Mitsubishi Alpha, Zelio Logic, Omron ZEN,
Moeller EASY).
Программируемы ПЛК на базе PC-совместимых компьютеров (MicroPC, WinCon).
Распределённые системы управления DCS.
Автономное исполнение
ПЛК представляют собой комбинированное управляющее и измерительное
устройство, сочетающее в себе усилители, АЦП, коммутаторы, микроконтроллеры и пр.
Информационная связь с ЭВМ осуществляется посредством одного из стандартных
интерфейсов связи (RS-232, RS-485, USB, приборного интерфейса GPIB и т.п.) Также
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
23
возможно использование этих интерфейсов для сетевого объединения автономных
компонентов друг с другом.
Магистрально-модульные системы
ПЛК может комплектоваться функциональными модулями расширения, которые
подключаются к общей шине ПЛК.
Плата расширения
Контроллер изготавливаются в виде платы расширения ЭВМ, и подключается к
внутреннему системному интерфейсу (ISA, PCI и пр.).
Средства вычислительной техники
Рассмотрим основные классы средств вычислительной техники, применяемые в
АСУ и СРВ.
«Промышленные» ПЭВМ. Частично решить проблему надежности и устойчивости
к неблагоприятным внешним условиям помогает специализированное «инженерное»
исполнение, предусматривающее металлический корпус, ударо- и вибростойкое шасси,
мощную систему охлаждения, нестандартную компоновку материнских плат и т.п.
Типичная промышленная персональная ЭВМ снабжается большим количеством
различных сетевых и системных интерфейсов для подключения внешних устройств.
Назначение – сбор данных и управление многими объектами с большим числом
точек доступа в масштабах цеха или предприятия; сбор, обработка, визуализация и
хранение потоков данных, поступающих из локальных узлов, в качестве которых
выступают промышленные контроллеры и микроконтроллеры.
Примеры
Промышленные контроллеры и программируемые логические контроллеры (ПЛК)
– полноценные микроЭВМ, которые невелики по размерам, недороги, обладают
сравнительно небольшой вычислительной мощностью (тактовая частота процессора –
несколько десятков МГц, объем оперативной памяти – до нескольких Мбайт), но
развитыми средствами коммуникаций. Обычно, к ним не подключаются ни клавиатура, ни
монитор, а весь обмен с оператором идет через имеющиеся интерфейсы (например, через
RS-232). Часто промышленные контроллеры выполняются в виде функциональных
модулей магистрально-модульных систем. Основное назначение – решение несложных
задач сбора и обработки данных и локального управления в масштабе станка,
промышленной установки, автономного агрегата и т.п. Типичное применение – работа в
качестве одного из узлов сети и/или управляющего модуля магистрально-модульной
системы.
Примеры
Цифровые сигнальные процессоры (DSP) и цифровые микроконтроллеры (МК) –
компактные и дешевые устройства, предназначенные для решения несложных типовых
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
24
задач автоматизации управления во встроенных и бортовых системах. DSP и МК часто
выполняются в виде одной микросхемы (или в виде «чипсета» – комплекта микросхем),
интегрирующей в себе ряд устройств: АЛУ, ОЗУ, ПЗУ для хранения программ, АЦП,
ЦАП, простой интерфейс передачи данных и т.п. Основное отличие МК от DSP
заключается в том, что DSP проблемно-ориентированы, в их системе команд
присутствуют специализированные машинные команды, реализующие алгоритмы
цифровой обработки сигналов; MK более универсальны.
Примеры
Вопросы для самоконтроля:
1) Сигнал на выходе датчика изменяется в пределах ±1В, а АЦП рассчитан на диапазон
±7.5В. Предложите схему усилителя и номиналы резисторов.
2) Пределы измерения АЦП составляют ±5В, разрядность – 8 бит. Какова погрешность
дискретизации в вольтах? В процентах?
3) Время преобразования АЦП составляет 22.7 мкс. Какова максимальная частота
дискретизации сигнала, которую можно достичь с этим АЦП?
4) Данные по интерфейсу RS-232 передаются пакетами, состоящими из одного
стартового, 8 информационных и одного стопового бита со скоростью 115 кбит/с.
Какова продолжительность передачи одного бита? Одного пакета?
Список использованных источников
1) Системы реального времени: обзорный курс лекций / К.Е. Климентьев. – Самара:
Самар. гос. аэрокосм. ун-т. Самара, 2008. – 45 с.

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
25