Файл: Лекция 3 по СРВ (Программируемые логические контроллеры).pdf
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 506
Скачиваний: 14

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
1
Системы реального времени
Лекция 3
Программируемые логические контроллеры
Программируемый логический контроллер
Первые логические контроллеры появились в виде шкафов с набором соединённых
между собой реле и контактов. Эта схема задавалась жёстко на этапе проектирования и не
могла быть изменена в ходе эксплуатации.
В первых программируемых логических контроллерах (ПЛК), пришедших на
замену обычным логическим контроллерам, логика соединений программировалась
схемой соединений LD (Ladder logic Diagram). Устройство имело тот же принцип работы,
но реле и контакты (кроме входных и выходных) были виртуальными, то есть
существовали в виде программы микроконтроллера.
Программируемый логический контроллер (ПЛК) – это микропроцессорное
устройство, предназначенное для управления технологическими процессами в
промышленности и другими сложными технологическими объектами (например, системы
управления микроклиматом). Принцип работы ПЛК заключается в сборе сигналов от
датчиков и их обработке по прикладной программе пользователя с выдачей управляющих
сигналов на исполнительные устройства.
В системах управления технологическими процессами логические команды
преобладают над числовыми операциями, поэтому контроллеры и названы логическими.
Тем не менее, в современных логических контроллерах числовые операции реализуются
наравне с логическими. В ПЛК может обеспечиваться доступ к отдельным битам памяти.
ПЛК для станков с ЧПУ называется CNC-контроллер [
Программируемый
логический контроллер http://ru.cybernetics.wikia.com
].
Компактные (моноблочные) ПЛК
Omron CP1E
CP1E-E – эконом вариант
CP1E-N – с часами реального времени
Есть модули расширения
ЯП IEC-61131.3: LD, IL, ST, FB
Среда разработки CX-One компании Omron.
Omron CP1E предусматривают высокоскоростную шину USB для обеспечения
быстрого программирования. Программное обеспечение "Easy Input Editor" позволяет
ускорить программирование путем использования редактора с функцией интуитивной
подсказки для создания упорядоченной прикладной программы.

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
2
Серия СР1Е представлена двумя типами устройств: устройство СР1Е-Е является
наиболее экономичным, тогда как CP1E-N предусматривает встроенные часы реального
времени, функции управления движением и последовательный порт для подключения
HMI, устройства считывания штрих-кода или другого устройства с последовательным
интерфейсом.
Для улучшения функциональности предусмотрены несколько дополнительных
модулей. Так как серия СР1Е имеет одинаковое строение с сериями CP1L, СР1Н, СJ и CS,
ее программы совместимы для распределения памяти и команд.
Модульные ПЛК для небольших систем
Omron CJ1M
Младшие члены семейства CJ1 полностью совместимы "снизу-вверх" с сериями
CJ1G/H и CS1 по набору команд программирования и команд связи, а также в части
организации памяти. Теперь модульная концепция может быть полностью реализована
даже на уровне небольших систем, что позволяет сократить затраты на модернизацию,
расширение или перенастройку системы, поскольку эти операции не влекут за собой
полную реконструкцию системы управления.
Модульные ПЛК для небольших систем, совместимые с серией CJ1G/H.
Модули центральных процессоров со встроенными импульсными входами и
выходами для быстрой и простой реализации позиционирования и управления
перемещениями и с портом для простого подключения к сети Ethernet.
Программирование на языке структурированного текста в соответствии с IEC
61131-3, обширная библиотека функциональных блоков.
"Прозрачное" прохождение данных через несколько сетей различного типа Гнездо
для компактной карты памяти CompactFlash, предназначенной для хранения данных и
обмена программами.
Связь между отдельными ПЛК или между ПЛК и вышестоящей информационной
системой может быть организована по последовательному интерфейсу, по сети Ethernet
или по простой и удобной сети Controller Link.
Компания Omron поддерживает две основные сети полевого уровня: DeviceNet и
PROFIBUS-DP. Для высокоскоростного обмена данными ввода/вывода на полевом уровне
компания Omron предлагает собственную сеть CompoBus/S, отличающуюся
непревзойденной простотой монтажа и настройки. Используя сети на базе
последовательного интерфейса или CAN, полностью открытые для конфигурирования,
можно самостоятельно внедрять разнообразные внутрифирменные протоколы.
EtherNet/IP предоставляет функции Data link для обмена большими объемами
данных между ПЛК. Модульная система распределенного ввода-вывода SmartSlice и
новый интерфейсный модуль ПЛК сети PROFINET-IO позволяют создавать системы
управления полевыми и информационными уровнями с возможностью резервирования.
Модульные ПЛК стоечного монтажа
Omron CS1G/H

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
3
S1 - это наиболее обширное семейство ПЖ компании Omron, максимальная
емкость ввода/вывода у которого составляет 5120 "локальных" дискретных
входов/выходов. К одной стойке центрального процессора может быть подсоединено до
семи стоек расширения, что позволяет довести общее количество модулей ввода/вывода в
системе до 80. На выбор представлено свыше 200 моделей разнообразных модулей
дискретных и аналоговых входов/входов, модулей регулирования и модулей связи,
которые могут устанавливаться в стойки в любом сочетании и в любом порядке.
Обширный набор команд и библиотека функциональных блоков позволяют создавать
очень
компактные
программы,
допускающие
смешанное
использование
структурированного текста и "лестничных диаграмм" - языков стандарта IЕС 61131-3.
Быстрые ЦПУ с большим объемом памяти программ.
Большое количество специальных модулей для управления перемещениями,
регулирования температуры и подключения к сетям связи.
Компания Omron выпускает две модели модулей центрального процессора серии
CS1, отличающиеся скоростью выполнения операций, каждая из которых имеет несколько
исполнений с различным объемом памяти. Помимо базовых моделей ЦПУ в состав серии
входят модели, предназначенные для создания дублированных систем, поддерживающие
"горячую" замену модулей ввода/вывода. Во всех моделях ЦПУ предусмотрено гнездо для
установки специальной платы с непосредственным подключением к шине ЦПУ. В это
гнездо может быть вставлена плата последовательного интерфейса или плата
циклического управления.
Все модули ЦПУ поддерживают программирование на языке структурированного
текста и на языке релейно-контактной логики ("лестничных диаграмм"), предусмотренных
стандартом IEC61131-3. Обширная библиотека функциональных блоков компании Omron
уменьшает трудоемкость программирования, кроме того, имеется возможность создания
собственных функциональных блоков под конкретные требования.
Модули счетчиков получают информацию о положении от датчиков положения с
последовательным интерфейсом (SSI) или от инкрементных датчиков положения.
Фактическое положение объекта сравнивается с внутренним заданным значением.
Модули позиционного управления служат для координатного (поточечного)
позиционирования с применением сервоприводов или шаговых двигателей. Задания и
профили разгона/замедления можно корректировать "на лету".
Модули позиционирования и многоосного управления перемещениями снабжены
интерфейсом MechatroLink-II и могут управлять одновременно несколькими приводами,
связанными единым высокоскоростным каналом связи.
Возможность маршрутизации сообщений через несколько сетевых уровней
позволяет конфигурировать участвующие в работе приводы из любой точки сети
управления.
Модули счетчиков получают информацию о положении от датчиков положения с
последовательным интерфейсом (SSI) или от инкрементных датчиков положения.
Фактическое положение объекта сравнивается с внутренним заданным значением.
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
4
Модули позиционного управления служат для координатного (поточечного)
позиционирования с применением сервоприводов или шаговых двигателей. Задания и
профили разгона/замедления можно корректировать "на лету".
Модули позиционирования и многоосного управления перемещениями снабжены
интерфейсом MechatroLink-II и могут управлять одновременно несколькими приводами,
связанными единым высокоскоростным каналом связи.
Возможность маршрутизации сообщений через несколько сетевых уровней
позволяет конфигурировать участвующие в работе приводы из любой точки сети
управления.
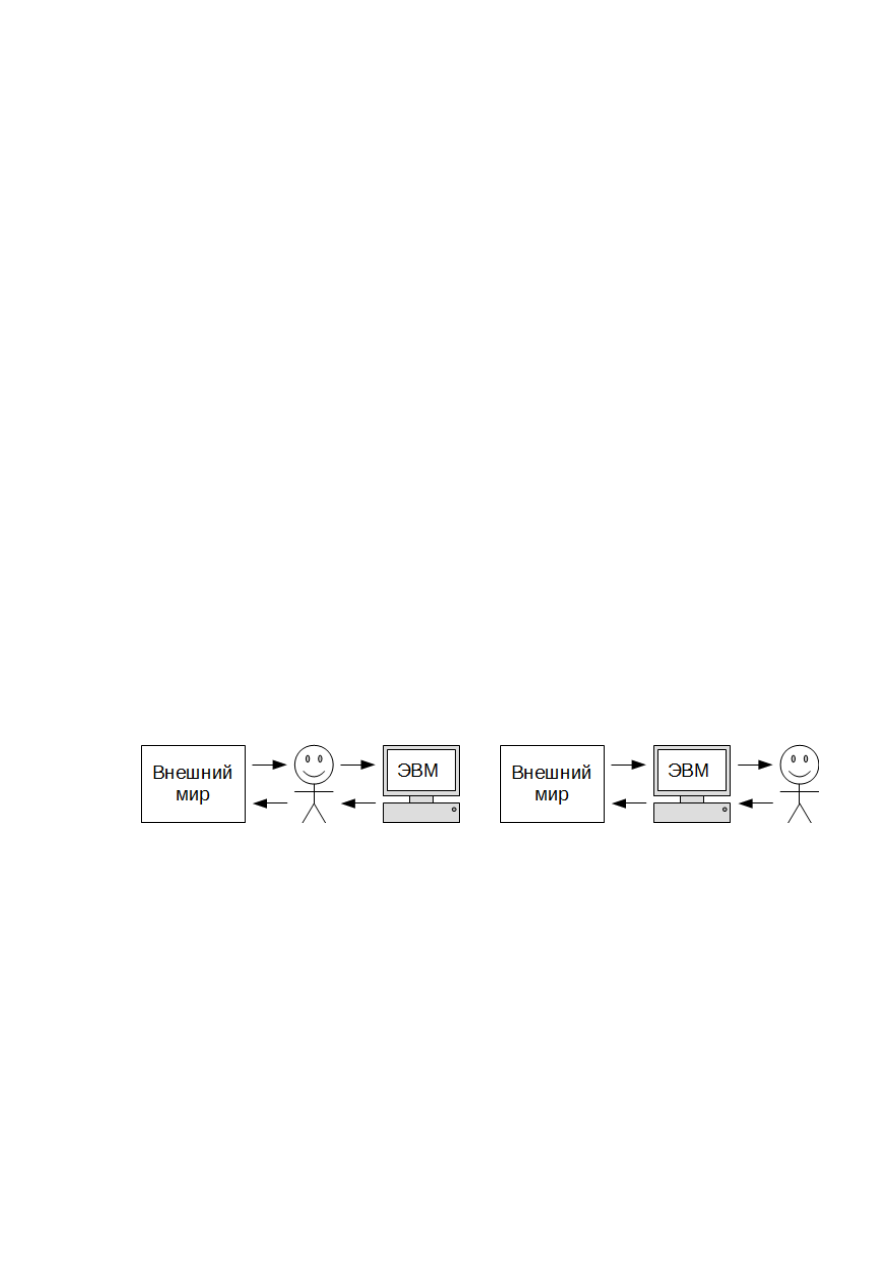
Рассмотрим две наиболее часто встречающиеся схемы отношений между
человеком, компьютером и окружающим их внешним миром (см. рисунок 1) [1].
а) человек – посредник между ЭВМ и
внешним миром
б) ЭВМ – посредник между человеком и
внешним миром
Рисунок 1 – Варианты применения ЭВМ
Случай (а) встречается чаще, он характерен для систем обработки информации.
Согласно этой схеме, человек непосредственно взаимодействует с объектами внешнего
мира (воспринимает от них информацию и оказывает на них воздействие), а ЭВМ играет
вспомогательную роль – выполняет вычисления и преобразования информации, которые
нужны человеку. Большинство систем, построенных по схеме (а) представляют собой
АИС (автоматизированные информационные системы), АРМ (автоматизированные
рабочие места), САПР (системы автоматизированного проектирования) и т.п.
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
5
Системами реального времени (СРВ) называются автоматизированные системы с
жесткими ограничениями на временные (динамические) характеристики работы.
Формально это условие может быть записано в виде:
(1)
где – некоторая временная характеристика (например, время реакции на внешнее
событие, длительность выполнения какой-либо операции, момент наступления какого-
либо события и т.п.);
– предельно допустимое значение времени реакции на событие.
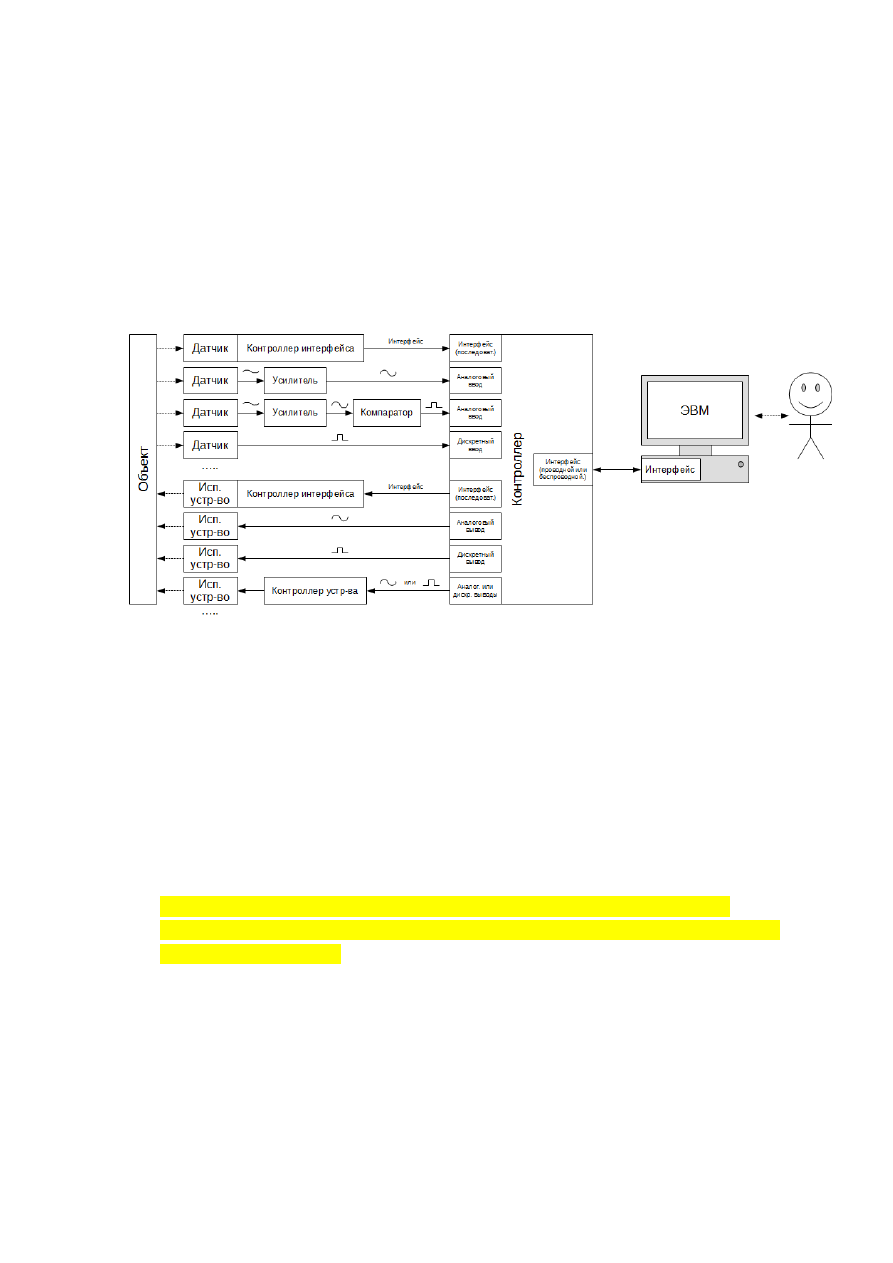
Обобщенная структура автоматизированной системы управления изображена на
рисунке 2.
Рисунок 2 – Обобщённая структурная схема АСУ
На практике встречаются также частные случаи этой структуры [1]
Контрольные вопросы
1)
Список использованных источников
1)
2)
3) Системы реального времени / Журнал «СТА» («Современные технологии
автоматизации») [Электронный ресурс]. URL: www.cta.ru/cms/f/326684.pdf (дата
обращения: 05.10.2016)