Файл: Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 20.10.2020
Просмотров: 6070
Скачиваний: 170
где V
r
- радиальная составляющая скорости носителя БРЛС в направлении це
ли; У
щ
- радиальная составляющая скорости цели в направлении РЛС.
Так как цель находится в основном лепестке ДНА, радиальная скорость
РЛС относительно цели известна. При горизонтальном полете и большой даль
ности цели где θ - азимутальный угол ДНА относительно векто
ра путевой скорости. При неизвестном угле сноса радиальную скорость носи
теля можно определить непосредственно измеряя доплеровскую частоту фона,
принимаемого основным лепестком ДН антенны: . Этот метод
используют для смещения частоты спектра при любом положении ДН в про
цессе сканирования по азимуту.
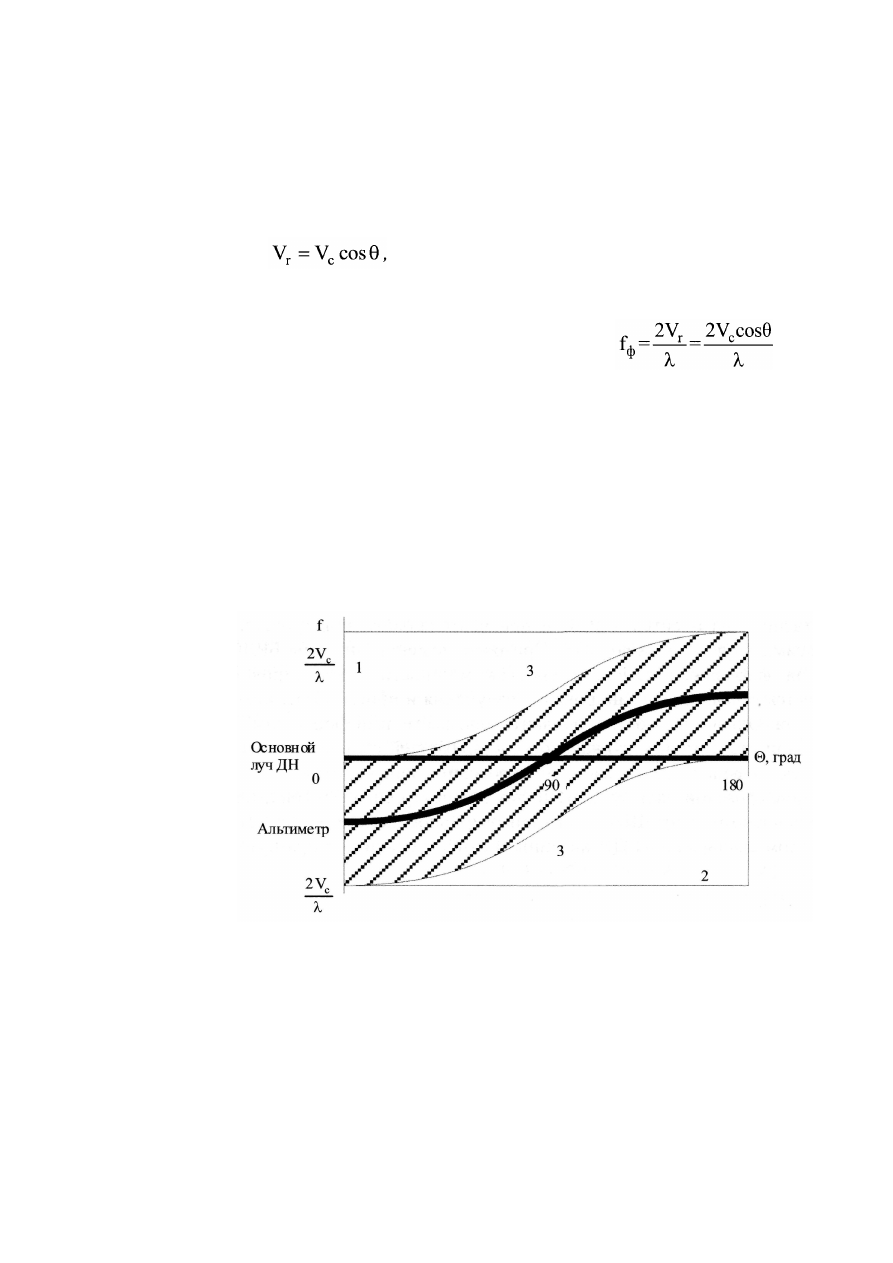
На рис. 2.14 показано изменение положения всего спектра помех по часто
те при сканировании ДНА по азимуту и смещении спектра фона основного лу
ча ДНА на нулевую частоту. Сигналы сближающихся с БРЛС целей в передней
зоне обзора (Θ = ±30°) наблюдаются в свободной от помех зоне 1. В свободной
задней зоне обзора 2 (Θ = 180°±30°) будут находиться сигналы удаляющихся
целей. При боковом обзоре (Θ = 90°±30°) все малоскоростные цели будут на
ходиться в зоне помех, а скоростные цели - в свободной зоне 3.
Рис. 2.14
Оптимальная обработка сигналов, наблюдаемых на фоне помех с нерав
номерной спектральной плотностью, обычно выполняется в два этапа. На пер
вом этапе режектируются выбросы спектра помех (альтиметровый фон и фон,
принимаемый по главному лепестку ДНА). В результате спектральная плот
ность помехи в области доплеровского спектра сигнала становится равномер
ной, т. е. белым шумом («выбеливание» помехи). Второй этап сводится к со
гласованной обработке сигналов цели, прошедших «выбеливающий» фильтр.

Согласованная обработка сигналов выполняется раздельно для импульс
ного сигнала внутри периода повторения импульсов и для когерентной пачки
импульсных сигналов (межпериодная обработка).
Согласованная обработка сигналов по задержке (внутрипериодная обра
ботка) осуществляется фильтром УПЧ, форма частотной характеристики кото
рого согласована со спектром импульсного сигнала точечной цели.
Согласованная обработка пачки импульсов в каждом элементе разрешения
по задержке (стробе дальности) сводится к обычной узкополосной доплеров-
ской фильтрации (когерентному накоплению) гармонического сигнала цели и
выполняется цифровым процессором при помощи алгоритма быстрого преоб
разования Фурье (БПФ).
Сигналы каждого канала по задержке и частоте поступают на порог обнару
жения, определяемый уровнем фона и помехи в каждом доплеровском фильтре.
Алгоритм обнаружения сигналов низколетящих воздушных целей на фоне
отражений от подстилающей поверхности представлен на рис. 2.15.
Рис. 2.15

Для устранения перегрузки приемника в момент излучения передатчика в
системе защиты приемника проводится бланкирование импульсов передатчика
на время 3—4 мкс. Кроме того, система защиты бланкирует импульсные помехи
от внешних источников излучения.
В момент прихода мощного отраженного сигнала от местности непосред
ственно под носителем БРЛС (альтиметровый сигнал) приемник запирается на
время прихода отраженных сигналов в полосе дальности (400...500) м. Иногда
путем выбора частоты повторения зондирующих сигналов и высоты полета но
сителя БРЛС совмещают времена бланкирования импульсов передатчика и
альтиметра, что уменьшает «мертвую» зону приема сигналов.
Согласованная обработка импульсных сигналов цели проводится путем
выбора частотной характеристики УПЧ. Для уменьшения вероятности появле
ния дополнительных (ложных) отметок цели в соседних элементах разрешения
по дальности (задержке) амплитудно-частотная характеристика УПЧ взвеши
вается специальной функцией (например, Хэмминга) для уменьшения уровня
боковых лепестков выходного сигнала точечной цели.
В пределах периода повторения сигналов на входе УПЧ проводится стро-
бирование сигналов по задержке. Длительность каждого строба Δτ определяет
ся разрешающей способностью БРЛС по задержке δτ (дальности). Для умень
шения потерь энергии сигнала при стробировании вследствие несовпадения
максимума сигнала цели с центром строба увеличивают число стробов (выбо
рок) на элемент разрешения: Ъх = (1,0...2,0)Δτ. При частоте повторения
F
n
= 25 кГц и разрешении по задержке 5t = 1 мкс число каналов по дальности
(число обрабатываемых выборок сигналов) Чем
больше число каналов, тем меньше потери сигнала, но тем сложнее система
обработки. Импульсные сигналы с каждого строба дальности поступают в свой
канал межпериодной обработки (доплеровской фильтрации пачки импульсных
сигналов).
Так как доплеровский спектр сигналов цели и помех имеет периодический
характер (см. рис. 2.13) для уменьшения динамического диапазона на 20...30 дБ
используют только центральную часть спектра, выделяемую при помощи од
нополосного (обычно кварцевого) фильтра. Иногда для снижения динамиче
ского диапазона доплеровский спектр разделяется двумя фильтрами на две час
ти (левую и правую) относительно несущей (промежуточной) частоты с после
дующей раздельной обработкой каждой части спектра.
Сигналы альтиметра и малоскоростных целей, в том числе наземных, а
также проникающие сигналы излучения передатчика имеют нулевые допле-
ровские частоты. Режекторный фильтр подавляет сигналы нулевых частот в
полосе 1,5...2,0 кГц.

Алгоритмы оценки частоты сигнала фона, принимаемого по основному
лепестку ДНА, а также алгоритмы смещения спектра всех сигналов на величи
ну этой частоты, обеспечивают возможность:
эффективной режекции (подавления) помех, принимаемых по основному
лучу ДН антенны низкочастотным фильтром, на 40.. .50 дБ;
получения максимальной зоны по частоте (скорости сближения целей),
свободной от помех в передней зоне обзора (см. рис. 2.14);
получения максимальной зоны по частоте (скорости удаления целей), сво
бодной от помех в задней зоне обзора.
В случае необходимости обнаружения с одинаковой эффективностью всех
целей (сближающихся и удаляющихся) в круговой зоне обзора после подавления
фона основного луча ДН антенны спектр всех сигналов смещается в первона
чальное состояние, когда центральная частота спектра фона равна нулю.
Несмотря на режекцию выбросов спектра фона на нулевой частоте (аль-
тометр) и частоте фона главного луча ДН антенны, спектральная плотность
фона, принимаемого по боковым лепесткам ДН антенны, значительно пре
вышает спектральную плотность помех в зоне, свободной от фона. Для вы
равнивания уровней сигналов фона и помех перед узкополосной доплеров-
ской фильтрацией используют две раздельные системы АРУ - по фону и по
помехам.
Узкополосная доплеровская фильтрация сигналов в каждом стробе даль
ности обеспечивает согласованную обработку сигналов как в зоне спектра фо
на, так и в свободной зоне (зоне помех).
Пороги обнаружения выставляются для обеспечения заданного уровня ве
роятности ложных тревог. Номер строба дальности и номер фильтра доплеров-
ской частоты (скорости), в которых сигнал превысил порог, являются исход
ными данными для оценки координат целей и завязки траекторий целей.
Следует отметить, что операции режекции фона и узкополосной фильтра
ции могут быть объединены и выполнены путем отключения фильтров с номе
рами, соответствующими зоне режекции.
При достаточно большой радиальной скорости низколетящей воздушной
цели спектр сигнала цели находится вне спектра фона. Вероятность обнаруже
ния такой цели определяется отношением сигнал/помеха, где помеха формиру
ется в основном внутренним шумом приемника и активными источниками по
мех. Помехи фона в этой области спектра обусловлены флуктуациями частоты
зондирующего сигнала, которые формируют боковые лепестки спектра сигнала
фона. Обычно для уменьшения уровня фона используется весовая обработка
пачки импульсных сигналов, обеспечивающая подавление фона до уровня ни
же собственных шумов приемника.
Отношение сигнал/шум в элементе разрешения по задержке и частоте оп
ределяется выражением

где Р
ср
- средняя мощность излучения БРЛС; Т
с
- время когерентного накопле
ния пачки импульсов (доплеровская фильтрация); G - коэффициент усиления
антенны, одинаковый на передачу и прием; λ - длина волны БРЛС; Ν
π
- спек
тральная плотность мощности помех; а
п
- суммарный коэффициент потерь
энергии сигнала; Д - дальность цели.
Средняя мощность существующих БРЛС АКРЛДН порядка 10...15 кВт.
Время накопления обычно 2.. .3 мс.
Время облучения цели
где Θ
0
- ширина ДН по азимуту (1°), Q
c
- угловая скорость вращения антенны
(360° за 10 с), Тобл^ЗО мс. Через каждые 10 мс изменяется частота повторения.
За время 10 мс проводятся четыре обработки на одной частоте повторения и
обнаружение ведется по алгоритму «три из четырех».
Коэффициент усиления антенны при ширине ДН
Θ
0
= 1 ° Η
Φ
0
=5° порядка
7. ..810
3
. ЭПР цели (истребитель) - 3.. .5 м
2
.
Спектральная плотность шумов определяется коэффициентом шума МШУ
и устройств защиты приемника: К
ш
=4.. .6 дБ и N
0
= kTF
m
= 4-10 -¥
ш
[Вт/Гц]. В
случае активной шумовой помехи N
n
= N
G
+ Ν
Α
π, где Ν
Α
π - спектральная плот
ность активной помехи.
Суммарные потери (средние оценочные значения [8]) состоят из следую
щих составляющих:
в обтекателе (0,8... 1,2) дБ;
в волноводах передатчика (1,0... 1,2) дБ;
в волноводах приемника (1,2... 1,6) дБ;
за счет ДНА при обработке (1,3... 1,5) дБ;
при стробировании по задержке (0,2.. .0,3) дБ;
при режектировании фона (0,5.. .0,9) дБ;
за счет рассогласования характеристики УПЧ (0,2.. .0,3) дБ;
при стробировании по частоте и весовой обработке (1,5...1,9) дБ;
при пороговой обработке (0,5.. .0,7) дБ;
потерь в дожде 6 дБ
Суммарные потери (без дождя) - 8... 14 дБ.
Требуемое отношение сигнал/помеха при Ρ ^ = 10
-6
в случае медленно флук
туирующей пачки импульсов для получения вероятности обнаружения Р
по
= 0,7
равно 10 дБ, а для вероятности 0,9 необходимо иметь 15 дБ (рис. 2.16, а).
Плотность распределения ЭПР цели экспоненциальная.